S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Transistor Technique, GernsbackDocument97 paginiTransistor Technique, GernsbackKevin HaworthÎncă nu există evaluări
- Skoda Fabia - Workshop ManualDocument260 paginiSkoda Fabia - Workshop Manualpaul_gpp63% (8)
- RF Training Module OverviewDocument56 paginiRF Training Module Overviewriskalltowin50% (2)
- 760 Series ValvesDocument8 pagini760 Series ValvesDiego CamachoÎncă nu există evaluări
- Current Feedback Operational Amplifier Wikipedia The Free EncyclopediaDocument4 paginiCurrent Feedback Operational Amplifier Wikipedia The Free EncyclopediaHanieft NdÎncă nu există evaluări
- Ariston Micro Genus 23 MFFI 27 MFFI Installation Manual 47 116 14 15 PDFDocument62 paginiAriston Micro Genus 23 MFFI 27 MFFI Installation Manual 47 116 14 15 PDFMuresan Sandu100% (2)
- 8522A RS232 To RS485-Rs422 Converter User GuideDocument2 pagini8522A RS232 To RS485-Rs422 Converter User Guidetegar sulistiantoÎncă nu există evaluări
- 10 Gaa21150 2Document19 pagini10 Gaa21150 2suthan100% (1)
- Hobbico Electristar EP ManualDocument16 paginiHobbico Electristar EP ManualJasonÎncă nu există evaluări
- Electricity at Work Regulations 1989.Document52 paginiElectricity at Work Regulations 1989.kagkaggÎncă nu există evaluări
- WRT54GL ManualDocument41 paginiWRT54GL ManualNenad ArsenovicÎncă nu există evaluări
- Lectric Ressure Ooker: Downloaded From Manuals Search EngineDocument52 paginiLectric Ressure Ooker: Downloaded From Manuals Search EngineMuresan SanduÎncă nu există evaluări
- Service Manual: KD-G201, KD-G202, KD-G207Document49 paginiService Manual: KD-G201, KD-G202, KD-G207Muresan SanduÎncă nu există evaluări
- 4x4 Toyota Land Cruiser F Engine Manual LR PDFDocument188 pagini4x4 Toyota Land Cruiser F Engine Manual LR PDFMuresan Sandu83% (12)
- 501 Catalog 2005Document416 pagini501 Catalog 2005Muresan SanduÎncă nu există evaluări
- Digital Temperature Controller: E5 @C/E5@C-TDocument98 paginiDigital Temperature Controller: E5 @C/E5@C-TMuresan SanduÎncă nu există evaluări
- 4x4 Toyota Land Cruiser F Engine Manual LR PDFDocument188 pagini4x4 Toyota Land Cruiser F Engine Manual LR PDFMuresan Sandu83% (12)
- g4 Rear AxleDocument21 paginig4 Rear Axlemirce1985Încă nu există evaluări
- Automation Impulses CatalogueDocument131 paginiAutomation Impulses CatalogueMuresan SanduÎncă nu există evaluări
- 4x4 Toyota Land Cruiser F Engine Manual LR PDFDocument188 pagini4x4 Toyota Land Cruiser F Engine Manual LR PDFMuresan Sandu83% (12)
- G4 Rear Wheel BearingDocument7 paginiG4 Rear Wheel BearingMuresan SanduÎncă nu există evaluări
- 4x4 Toyota Land Cruiser F Engine Manual LR PDFDocument188 pagini4x4 Toyota Land Cruiser F Engine Manual LR PDFMuresan Sandu83% (12)
- 2 N 2907Document5 pagini2 N 2907Luis CuellarÎncă nu există evaluări
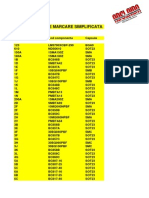
- SMD component codes and markingsDocument0 paginiSMD component codes and markingsMuresan SanduÎncă nu există evaluări
- La 7850Document5 paginiLa 7850Muresan SanduÎncă nu există evaluări
- Shindengen: General Purpose RectifiersDocument5 paginiShindengen: General Purpose RectifiersMuresan SanduÎncă nu există evaluări
- 74C926Document9 pagini74C926MUHAMMAD SISWANTOROÎncă nu există evaluări
- LM 381Document6 paginiLM 381Muresan SanduÎncă nu există evaluări
- CPT1444Document20 paginiCPT1444Muresan SanduÎncă nu există evaluări
- Go Dsag s1nb60Document2 paginiGo Dsag s1nb60Muresan SanduÎncă nu există evaluări
- Semiconductor Technical Data Zero Voltage SwitchDocument6 paginiSemiconductor Technical Data Zero Voltage SwitchMuresan SanduÎncă nu există evaluări
- LG/Goldstar/EZ Digital OS-3020 OS-3040 OS-3060 ManualDocument114 paginiLG/Goldstar/EZ Digital OS-3020 OS-3040 OS-3060 Manualanon-714400100% (7)
- American National Standard Requirements For Cylindricalrotor SynDocument21 paginiAmerican National Standard Requirements For Cylindricalrotor SynDiego RamosÎncă nu există evaluări
- Experiments.1 12Document95 paginiExperiments.1 12Muhammad UmairÎncă nu există evaluări
- K41P y K41R Kilovac DatasheetDocument1 paginăK41P y K41R Kilovac DatasheetchapumaoÎncă nu există evaluări
- GTU BE Semester Exam Physics QuestionsDocument3 paginiGTU BE Semester Exam Physics QuestionsJeetParikhÎncă nu există evaluări
- Fuse Panel Trimm Data SheetDocument2 paginiFuse Panel Trimm Data SheetAvilaÎncă nu există evaluări
- The Thickness Uniformity of Films Deposited by Magnetron SputteringDocument4 paginiThe Thickness Uniformity of Films Deposited by Magnetron Sputteringgoldy243usÎncă nu există evaluări
- Catalogue Sheet 7SN71Document6 paginiCatalogue Sheet 7SN71Muhammad NomanÎncă nu există evaluări
- Applied Physics Viva Applied Physics VivaDocument15 paginiApplied Physics Viva Applied Physics VivaSyed Umer AhmedÎncă nu există evaluări
- Sir Zaheer'S Academy: Third OrderDocument19 paginiSir Zaheer'S Academy: Third OrderJawad NaqviÎncă nu există evaluări
- Farastrip Es: Faraday Electro-Chemicals Inc.Document2 paginiFarastrip Es: Faraday Electro-Chemicals Inc.nirai101259Încă nu există evaluări
- The Human Eye and Colour VisionDocument6 paginiThe Human Eye and Colour VisionChetan BhardwajÎncă nu există evaluări
- Liebert Intellislot 485: Modbus Reference GuideDocument52 paginiLiebert Intellislot 485: Modbus Reference GuideLuis Felipe MoyanoÎncă nu există evaluări
- RBC-1200 Three Phase Rectifier/Battery Charger User ManualDocument25 paginiRBC-1200 Three Phase Rectifier/Battery Charger User ManualEhab Anwar ElnagdyÎncă nu există evaluări
- Full emDocument435 paginiFull emgamelovereverbornÎncă nu există evaluări
- Rechargeable Sealed Lead-Acid Battery: 12 Volt 55 Amp. HrsDocument2 paginiRechargeable Sealed Lead-Acid Battery: 12 Volt 55 Amp. HrsJuan EsÎncă nu există evaluări
- St. Joseph's Anglo-Chinese School: NSS Physics SBA Manual The Cathode Ray Oscilloscope (CRO)Document5 paginiSt. Joseph's Anglo-Chinese School: NSS Physics SBA Manual The Cathode Ray Oscilloscope (CRO)Alyssa ColeÎncă nu există evaluări
- 32 KV High Voltage Power Transmission Line and Stress On Brassica JunceaDocument4 pagini32 KV High Voltage Power Transmission Line and Stress On Brassica Junceamuhammad mushofahÎncă nu există evaluări
- Ground Floor Lighting Layout Second Floor Lighting Layout: A B C A B CDocument1 paginăGround Floor Lighting Layout Second Floor Lighting Layout: A B C A B CJerome AdduruÎncă nu există evaluări
- 2 Ask, PSK, FSKDocument15 pagini2 Ask, PSK, FSKI AM A PROGRAMMERÎncă nu există evaluări
- Unit-5 Superconductivity and NanomaterialsDocument8 paginiUnit-5 Superconductivity and NanomaterialsAnshu SinghÎncă nu există evaluări
- Andmeleht Alpha Continuity Plus 6kW 10kWDocument2 paginiAndmeleht Alpha Continuity Plus 6kW 10kWAleksandar NikolicÎncă nu există evaluări
- Rca 26ek Series: Multi-Volt Attitude IndicatorDocument3 paginiRca 26ek Series: Multi-Volt Attitude IndicatorBryan AÏT-OUARETÎncă nu există evaluări
- PCS-985TE - X - Instruction Manual - EN - Overseas General - X - R1.00 PDFDocument380 paginiPCS-985TE - X - Instruction Manual - EN - Overseas General - X - R1.00 PDFjayofo8363Încă nu există evaluări
- GBU200 (6F2S1926) 0.10 - Part6Document38 paginiGBU200 (6F2S1926) 0.10 - Part6Azrul Alif ZailanÎncă nu există evaluări