S-ar putea să vă placă și
- Química para geología: Aplicación en laboratorio y campoDe la EverandQuímica para geología: Aplicación en laboratorio y campoEvaluare: 4.5 din 5 stele4.5/5 (10)
- Geologia Estructural. 2015-1Document347 paginiGeologia Estructural. 2015-1Rosy GuzmanÎncă nu există evaluări
- Apuntes Geología EstructuralDocument128 paginiApuntes Geología EstructuralGabo HernandezÎncă nu există evaluări
- Guia Geologia Estructural, Stress y Circulo de MohrDocument3 paginiGuia Geologia Estructural, Stress y Circulo de MohrMatías PeñaÎncă nu există evaluări
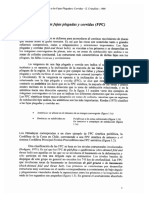
- Fajas Plegadas y Corridas 1638444726 PDFDocument86 paginiFajas Plegadas y Corridas 1638444726 PDFSimbolo de Paz100% (1)
- TEMA 9 - Deformacion de Materiales CorticalesDocument57 paginiTEMA 9 - Deformacion de Materiales CorticalesGuadalupeÎncă nu există evaluări
- Compresion y DistensionDocument8 paginiCompresion y DistensionAlex CanquiÎncă nu există evaluări
- Clasificación Rocas DetriticasDocument33 paginiClasificación Rocas DetriticasTimothy Jordan100% (1)
- Grupo de Los FeldespatosDocument15 paginiGrupo de Los FeldespatosJoshua Joseph Vasquez BrionesÎncă nu există evaluări
- Columna EstrátigraficaDocument31 paginiColumna EstrátigraficaMiryam Ortiz100% (1)
- Introducción Geología de MéxicoDocument36 paginiIntroducción Geología de MéxicoVíctor Rámirez100% (2)
- SEDIMENTOS TERRÍGENOS CLÁSTICOS. Freddy Rondón.Document12 paginiSEDIMENTOS TERRÍGENOS CLÁSTICOS. Freddy Rondón.Freddy RondonÎncă nu există evaluări
- Cristallini - Curso Geologia EstructuralDocument113 paginiCristallini - Curso Geologia EstructuralR4Ck3RÎncă nu există evaluări
- Ambientes Sedimentarios Preguntas LDGVDocument12 paginiAmbientes Sedimentarios Preguntas LDGVLuz Dany Grava100% (1)
- SedimentologíaDocument20 paginiSedimentologíaIrwing BrianÎncă nu există evaluări
- Ambientes SedimentariosDocument34 paginiAmbientes SedimentariosFabian Hernandez BautistaÎncă nu există evaluări
- Propiedades de Las RocasDocument13 paginiPropiedades de Las RocasJosé Francisco AzuajeÎncă nu există evaluări
- Ambientes SedimentariosDocument15 paginiAmbientes SedimentariosCarlos Orjuela100% (1)
- Mapas EstructuralesDocument56 paginiMapas EstructuralesMery GutierrezÎncă nu există evaluări
- Rocas MetamorficasDocument41 paginiRocas MetamorficasMikii Lalo Oz'Încă nu există evaluări
- Metamorfismo de ContactoDocument8 paginiMetamorfismo de ContactoYoung-ho AladroÎncă nu există evaluări
- Ciclo de Las RocasDocument19 paginiCiclo de Las RocasJean Max IlachoqueÎncă nu există evaluări
- Foliaciones ExposicionDocument8 paginiFoliaciones ExposicionEduardo Rodrigo de habichÎncă nu există evaluări
- SedimentologiaDocument98 paginiSedimentologiaSmoke_22100% (1)
- Tema 4 PlieguesDocument40 paginiTema 4 PlieguesGonzalo MorenoÎncă nu există evaluări
- Capitulo 4 Rocas SedimentariasDocument27 paginiCapitulo 4 Rocas SedimentariasJHONATANÎncă nu există evaluări
- Secuencia Bouman Deber1Document7 paginiSecuencia Bouman Deber1JorgePardoBscÎncă nu există evaluări
- Lectura 1Document34 paginiLectura 1A Rodrigo DucosÎncă nu există evaluări
- Trabajo Sobre PlagioclasasDocument17 paginiTrabajo Sobre PlagioclasasJhoim DcÎncă nu există evaluări
- Formacion de La PeñaDocument6 paginiFormacion de La PeñaThaliiz SalgadoÎncă nu există evaluări
- El Delta Del Rio NiloDocument4 paginiEl Delta Del Rio NiloMitzel FSÎncă nu există evaluări
- TurbiditasDocument16 paginiTurbiditasSixto Hernandez Jr.Încă nu există evaluări
- Deber - 17 - Clasificacion de Calizas FolkDocument6 paginiDeber - 17 - Clasificacion de Calizas FolkJefferson Játiva100% (1)
- Ambientes SedimentariosDocument23 paginiAmbientes SedimentariosLina Fernanda Susunaga MenesesÎncă nu există evaluări
- Estructuras SedimentariasDocument42 paginiEstructuras Sedimentariasluis_1024Încă nu există evaluări
- La Falla de CaltepecDocument27 paginiLa Falla de Caltepecraul218810Încă nu există evaluări
- Catalogo de Rocas Sedimentarias - LDGHDocument34 paginiCatalogo de Rocas Sedimentarias - LDGHLuis David Garcia HernandezÎncă nu există evaluări
- Principios de EstratigrafíaDocument26 paginiPrincipios de EstratigrafíaPedro PerillaÎncă nu există evaluări
- BIOESTRATIGRAFIADocument20 paginiBIOESTRATIGRAFIAMarisol JimenezÎncă nu există evaluări
- Geologia Aplicada A La Ingenieria CivilDocument0 paginiGeologia Aplicada A La Ingenieria CivilOzqhar Kraken HasstiingÎncă nu există evaluări
- Macizo RocosoDocument24 paginiMacizo RocosotefiplayboyÎncă nu există evaluări
- Ambiente Fluvial - Sedimentología y EstratigrafíaDocument18 paginiAmbiente Fluvial - Sedimentología y EstratigrafíaCarlos RondónÎncă nu există evaluări
- Caracterización de Macizos RocososDocument6 paginiCaracterización de Macizos RocososMauricio Nuñez PeredoÎncă nu există evaluări
- Dinámica FluvialDocument7 paginiDinámica FluvialPaul Reategui RamosÎncă nu există evaluări
- Catalogo de Estructuras SedimentariasDocument43 paginiCatalogo de Estructuras SedimentariasD. Radames Vazquez J.Încă nu există evaluări
- Analisis de Cuencas SedimentariasDocument54 paginiAnalisis de Cuencas SedimentariasCésar Bernal GálvezÎncă nu există evaluări
- Estructuras Primarias y Secundarias de Las Rocas SedimentariasDocument6 paginiEstructuras Primarias y Secundarias de Las Rocas Sedimentariaseduplay 11Încă nu există evaluări
- Geologia SismosDocument37 paginiGeologia SismosDavid Hernandez CortezÎncă nu există evaluări
- Facies Zeolitas PDFDocument10 paginiFacies Zeolitas PDFBlancaÎncă nu există evaluări
- Geología Estructural Hans NiemeyerDocument26 paginiGeología Estructural Hans NiemeyerJuan Pablo Velásquez VidalÎncă nu există evaluări
- Fallas y Pliegues de La Corteza TerrestreDocument16 paginiFallas y Pliegues de La Corteza TerrestreKokoVentasÎncă nu există evaluări
- Preguntas G.H.Document20 paginiPreguntas G.H.OSCAR PINTOS50% (2)
- Procesos Formadores de CuencasDocument29 paginiProcesos Formadores de Cuencasalpes27Încă nu există evaluări
- Clasificacion Cuencas Sedim.Document47 paginiClasificacion Cuencas Sedim.Eadwine EdÎncă nu există evaluări
- SOROSILICATOSDocument3 paginiSOROSILICATOSJhon alexanderÎncă nu există evaluări
- Yacimientos minerales: Los tesoros de la tierraDe la EverandYacimientos minerales: Los tesoros de la tierraEvaluare: 4 din 5 stele4/5 (2)
- Yacimientos de PegmatitasDocument5 paginiYacimientos de PegmatitasGabriel I. AramayoÎncă nu există evaluări
- Metalogénesis y MetalotectoDocument9 paginiMetalogénesis y MetalotectoGabriel I. AramayoÎncă nu există evaluări
- Yacimientos VMSDocument7 paginiYacimientos VMSGabriel I. AramayoÎncă nu există evaluări
- Yacimientos BIFDocument9 paginiYacimientos BIFGabriel I. AramayoÎncă nu există evaluări
- Depósitos MineralesDocument8 paginiDepósitos MineralesGabriel I. AramayoÎncă nu există evaluări
- Textura y Estructura de Los Dep MineralesDocument5 paginiTextura y Estructura de Los Dep MineralesGabriel I. AramayoÎncă nu există evaluări
- Ciclo Cordillerano GEOLOGIADocument3 paginiCiclo Cordillerano GEOLOGIAGabriel I. AramayoÎncă nu există evaluări
- Bidner M. Propiedades de La Roca y Los Fluidos en Reservorios de Petroleo PDFDocument121 paginiBidner M. Propiedades de La Roca y Los Fluidos en Reservorios de Petroleo PDFGabriel I. AramayoÎncă nu există evaluări
- Pájaro Campana - PartituraDocument4 paginiPájaro Campana - Partituracalaveraviejo290480% (20)
- 3ra Circular Xi Cadeg Cba 2017Document10 pagini3ra Circular Xi Cadeg Cba 2017Gabriel I. AramayoÎncă nu există evaluări
- Geofisica VitulliDocument18 paginiGeofisica VitulliGabriel I. AramayoÎncă nu există evaluări
- CachiruDocument1 paginăCachiruGabriel I. AramayoÎncă nu există evaluări
- Cuenca Creta Cica NOA ARGENTINODocument49 paginiCuenca Creta Cica NOA ARGENTINOGabriel I. Aramayo100% (3)
- Representación Gráfica de Los Campos MagnéticosDocument1 paginăRepresentación Gráfica de Los Campos MagnéticosGabriel I. Aramayo67% (6)
- El Continente RelegadoDocument2 paginiEl Continente RelegadoGabriel I. AramayoÎncă nu există evaluări
- EenaDocument6 paginiEenaJohel Gamarra CanahuireÎncă nu există evaluări
- Guia de Laboratorio FISICA IIDocument78 paginiGuia de Laboratorio FISICA IIFotu PacoÎncă nu există evaluări
- Informe Ley de HookeDocument6 paginiInforme Ley de HookeFiorella Valentina Trujillo AbelloÎncă nu există evaluări
- Torque para TornillosDocument35 paginiTorque para TornillosCatriel1972100% (1)
- Fallas en Vigas ArmadasDocument20 paginiFallas en Vigas Armadaseugenio perez vasquez100% (1)
- CANCAMO-Estudio 1Document9 paginiCANCAMO-Estudio 1Ruben De La CruzÎncă nu există evaluări
- Vibraciones y OndasDocument59 paginiVibraciones y OndasantonprlrÎncă nu există evaluări
- Comportamiento Estructuras Ante SismosDocument35 paginiComportamiento Estructuras Ante SismosalejandroÎncă nu există evaluări
- Código Sísmico Costa Rica 2018Document127 paginiCódigo Sísmico Costa Rica 2018edchariÎncă nu există evaluări
- Guia de Ejercicios - Carga AxialDocument7 paginiGuia de Ejercicios - Carga AxialDiego FusterÎncă nu există evaluări
- Leccion 1.3Document27 paginiLeccion 1.3Andre Corrales100% (1)
- Propiedades de Los MetalesDocument6 paginiPropiedades de Los Metalesloquillo1601Încă nu există evaluări
- Reporte de SolidworksDocument12 paginiReporte de SolidworksMiguel Huertero DiegoÎncă nu există evaluări
- Perforación de Pozos AvanzadaDocument36 paginiPerforación de Pozos AvanzadaGómez AlejandroÎncă nu există evaluări
- Informe Columnas LargasDocument11 paginiInforme Columnas LargasFrancisco AltamiranoÎncă nu există evaluări
- Dinamica Aplicada-Laboratorio #2Document9 paginiDinamica Aplicada-Laboratorio #2Omar RiveraÎncă nu există evaluări
- Diseño Riostras Concentricas 2lDocument8 paginiDiseño Riostras Concentricas 2lJesus Antonio Garcia AlvarezÎncă nu există evaluări
- SILABO MADERA Mayo 2017. Julio Rojas BravoDocument2 paginiSILABO MADERA Mayo 2017. Julio Rojas BravoJosé Manuel MárquezÎncă nu există evaluări
- 4° Básico - Cuaderno de Trabajo - Ciencias NaturalesDocument54 pagini4° Básico - Cuaderno de Trabajo - Ciencias NaturalesNawel Molfin100% (1)
- Ensayo de Tracción de Metales en Laboratorio UDocument11 paginiEnsayo de Tracción de Metales en Laboratorio UMarcelo Xavi Quispe GuerecaÎncă nu există evaluări
- Fluidos No NewtonianosDocument17 paginiFluidos No NewtonianosAnthony Valdelomar De la OcaÎncă nu există evaluări
- Actualizacion Uribe EscamillaDocument16 paginiActualizacion Uribe EscamillaHernan Garzon Rodriguez100% (1)
- Viga Con Arriostramiento No Continuo 3Document62 paginiViga Con Arriostramiento No Continuo 3José Cruz C.Încă nu există evaluări
- Conferencia Roberto Rochel PDFDocument157 paginiConferencia Roberto Rochel PDFUriel Vélez Orejuela100% (1)
- Resumen de Resistencia de Materiales IIDocument53 paginiResumen de Resistencia de Materiales IIOmar Cruzado GonzalesÎncă nu există evaluări
- Ejercicios Con Banda Elástica PDFDocument36 paginiEjercicios Con Banda Elástica PDFRemil Senalles100% (2)
- Módulo IVDocument23 paginiMódulo IVAriel VergaraÎncă nu există evaluări
- Criterios Diseño de Estructuras de ConcretoDocument6 paginiCriterios Diseño de Estructuras de ConcretoBetsaida Rebolledo HerediaÎncă nu există evaluări
- Vigas de AceroDocument8 paginiVigas de AceroMaría Elena Novelo ArjonaÎncă nu există evaluări
- CARACTERÍSTICAS ELÁSTICAS DE MADERAS MEXICANAS (Excelente)Document78 paginiCARACTERÍSTICAS ELÁSTICAS DE MADERAS MEXICANAS (Excelente)Moisés Vázquez ToledoÎncă nu există evaluări