IOSR Journal of Electronics and Communication Engineering (IOSR-JECE)
e-ISSN: 2278-2834,p- ISSN: 2278-8735.Volume 10, Issue 3, Ver. II (May - Jun.2015), PP 49-56
www.iosrjournals.org
An Efficient Noise Removing Technique Using Mdbut Filter in
Images
S. Kishor Krishna Kumar, Mennaiah Batta
(ECE,DRK College of engineering/JNTUH/INDIA)
(ECE,NOVA college of engg&tech/IIT KHARAGPUR/INDIA)
Abstract: It is important to remove or minimize the degradations, noises in valuable ancient blurred color
images. The traditional available filtering methodologies are applicable for fixed window dimensions only these
are not applicable for varying scale images. In our project we propose a new technique for digital image
restoration, in this the noise free and noisy pixels are classified based on empirical multiple threshold values.
Then the median filtering technique is applied. So that noise free pixels are getting preserved and only noisy
pixels get restored.
In this papert, an Adaptive median filter, called the Decision based filter (MDBUT) filter, is proposed to restore
images corrupted by salt-pepper impulse noise. The filter is based on a detection-estimation strategy. The
impulse detection algorithm is used before the filtering process, and therefore only the noise-corrupted pixels
are replaced with the estimated central noise-free ordered mean value in the current filter window. The new
impulse detector, which uses multiple thresholds with multiple neighborhood information of the signal in the
filter window, is very precise, while avoiding an undue increase in computational complexity. For impulse noise
suppression without smearing fine details and edges in the image, extensive experimental results demonstrate
that our scheme performs significantly better than many existing, well-accepted decision-based methods.
Keywords: meanfilter, medianfilter, mdbut filter
I.
Introduction
Images are often corrupted by impulse noise when they are recorded by noisy sensors or sent over
noisy transmission channels. Many impulse noise removal techniques have been developed to suppress impulse
noise while preserving image details. The median filter, the most popular kind of nonlinear filter, has been
extensively used for the removal of impulse noise due to its simplicity. However, the median filter tends to blur
fine details and lines in many cases. To avoid damage to good pixels, decision-based median filters realized by
thresholding operations have been introduced in some recently published works. In general, the decision-based
filtering procedure consists of the following two steps: an impulse detector that classifies the input pixels as
either noise-corrupted or noise-free, and a noise reduction filter that modifies only those pixels that are classified
as noise-corrupted.
In general, the main issue concerning the design of the decision-based median filter focuses on how to
extract features from the local information and establish the decision rule, in such a way to distinguish noisefree pixels from contaminated ones as precisely as possible. In addition, to achieve high noise reduction with
fine detail preservation, it is also crucial to apply the optimal threshold value to the local signal statistics.
Usually a trade-off exists between noise reduction and detail preservation. In this paper, we propose a novel
decision-based filter, named the multiple thresholds switching (MTS) filter, to overcome the drawbacks of the
above methods. Basically, the proposed filter takes a new impulse detection strategy to build the decision rule
and practice the threshold function.
The new impulse detection approach based on multiple thresholds considers multiple neighborhood
information of the filter window to judge whether impulse noise exists. The new impulse detector is very precise
An Efficient Noise Removing Technique Using Mdbut Filter In Images
Without, while avoiding an increase in computational complexity. The impulse detection algorithm is
used before the filtering process starts, and therefore only the noise-corrupted pixels are replaced with the
estimated central noise-free ordered mean value in the current filter window. Extensive experimental results
demonstrate that the new filter is capable of preserving more details while effectively suppressing impulse noise
in corrupted images.
One of the most intriguing questions in image processing is the problem of recovering the desired or
perfect image from a degraded version. In many instances one has the feeling that the degradations in the image
are such that relevant information is close to being recognizable, if only the image could be sharpened just a
little. Blurring is a form of bandwidth reduction of the image due to imperfect image formation process. It can
DOI: 10.9790/2834-10324956
www.iosrjournals.org
49 | Page
An Efficient Noise Removing Technique Using Mdbut Filter in Images
be caused by relative motion between the camera and the original scene, or by optical system, which is out of
focus.
II.
Existing Method
1. Meanfilter
1.1brief description
Mean filtering is a simple, intuitive and easy to implement method of smoothing images, i.e. reducing
the amount of intensity variation between one pixel and the next. It is often used to reduce noise in images.
1.2how it works
A similar - but not identical - effect as a single pass with a large kernel.) The idea of mean filtering is
simply to replace each pixel value in an image with the mean (`average') value of its neighbours, including itself.
This has the effect of eliminating pixel values which are unrepresentative of their surroundings. Mean filtering is
usually thought of as a convolution filter. Like other convolutions it is based around a kernel, which represents
the shape and size of the neighbourhood to be sampled when calculating the mean. Often a 33 square kernel is
used, as shown in Figure 1, although larger kernels (e.g. 55 squares) can be used for more severe smoothing.
(Note that a small kernel can be applied more than once in order to produce
Fig 1: 33 averaging often used in mean filtering
Computing the straightforward convolution of an image with this kernel carries out the mean filtering process.
1.3process
It checks for the pixels that are noisy in input image i.e. pixels with the values 0 or 255 are to be
considered. For each such noisy pixel P, a window size of 3x3 neighbouring the pixel P is taken. Find the
absolute differences between the pixel P and the neighbouring pixels of P. The value of each pixel is compared
with the threshold value to detect whether the pixel P is signal pixel or corrupted by noise. If it is corrupted the
arithmetic mean of differences for a given pixel is calculated with respect to its neighbouring pixels. Otherwise
the pixel P is considered as signal pixel.This process may cause blurring effect.
An Efficient Noise Removing Technique Using Mdbut Filter In Images
2. Medianfilter
2.1brief description
The median filter is normally used to reduce noise in an image, somewhat like the mean filter.
However, it often does a better job than the mean filter of preserving useful detail in the image.
2.2how it works
Like the mean filter, the median filter considers each pixel in the image in turn and looks at its nearby
neighbours to decide whether or not it is representative of its surroundings. Instead of simply replacing the pixel
value with the mean of neighbouring pixel values, it replaces it with the median of those values. The median is
calculated by first sorting all the pixel values from the surrounding neighbourhood into numerical order and then
replacing the pixel being considered with the middle pixel value. (If the neighbourhood under consideration
contains an even number of pixels, the average of the two middle pixel values is used.) Figure 1 illustrates an
example calculation.
DOI: 10.9790/2834-10324956
www.iosrjournals.org
50 | Page
An Efficient Noise Removing Technique Using Mdbut Filter in Images
Fig 2: Calculating the median value of a pixel neighbourhood. As can be seen the central pixel value of 150 is
rather unrepresentative of the surrounding pixels and is replaced with the median value: 124. A 33 square
neighbourhood is used here --- larger neighborhoods will produce more severe smoothing.
2.3Process
Noise is detected by the noise detection algorithm mentioned above.
Filtering is applied only at those pixels that were detected as noisy.
Once a given pixel P is found to be noisy the following steps are applied
A 3x3 mask is centred at the pixel P and founds if there exists at least one signal pixel around the pixel P.
If found, the pixel P is replaced by the median of the signal pixels found in 3x3 neighbourhood of P.
The above steps are repeated if noise still there in the output image for better results.
An Efficient Noise Removing Technique Using Mdbut Filter In Images
III.
Proposed Method
3.1mdbut filter
The proposed Modied Decision Based Unsymmetric Trimmed Median Filter (MDBUTMF) algorithm
processes the corrupted images by rst detecting the impulse noise. The processing pixel is checked whether it
is noisy or noisy free. That is, if the processing pixel lies between maximum and minimum gray level values
then it is noise free pixel, it is left unchanged. If the processing pixel takes the maximum or minimum gray level
then it is noisy pixel which is processed by MDBUTMF. Unsymmetric Trimmed Median Filter (MDBUTMF)
algorithm removes this drawback at high noise density.
If the processing pixel value is 0 or 255 it is processed or else it is left unchanged. At high noise
density the median value will be 0 or 255 which is noisy. In such case, neighboring pixel is used for
replacement. This repeated replacement of neighboring pixel produces streaking effect. In order to avoid this
drawback, Decision Based Unsymmetric Trimmed Median Filter (DBUTMF) is proposed. At high noise
densities, if the selected window contains all 0s or 255s or both then, trimmed median value cannot be
obtained. So this algorithm does not give better results at very high noise density that is at 80% to 90%. The
proposed Modified Decision Based Unsymmetric Trimmed Median Filter (MDBUTMF) algorithm removes this
drawback at high noise density.
3.2 mdbut median filter
MDBUT Median Filter can be called as Modified Decision Based Unsymmetrical Trimmed. It
processes the corrupted images by first detecting the impulse noise. Whether it is noisy or noisy free can be
checked by using the processing pixel. It can say it is noise free pixel if the processing pixel lies between
maximum and minimum gray level values otherwise it can say that it is noisy pixel. In many practical cases of
image processing, only a noisy image is available. This circumstance is known as the blind condition. Many
denoising methods usually require the exact value of the noise distribution as an essential filter parameter.
So, the noise estimation methods in the spatial domain use the variance or standard deviation to
estimate the actual added noise distribution. But it is found that the mean deviation provides better results than
the variance or standard deviation to estimate the noise distribution. The advantage of this approach is that the
mean deviation is actually more efficient than the standard deviation in practical situations. The standard
deviation emphasizes a larger deviation; squaring the values makes each unit of distance from the mean
exponentially (rather than additively) larger. The larger deviation will cause overestimation or underestimation
of the noise. So, we assume that use of the mean deviation may contribute to more accurate noise estimation.
Keeping these points in view, the authors have used the mean deviation parameter in deciding the noise pixel
and replaced the central pixel by its mean deviation instead of its mean. The steps in the proposed algorithm are
given below.
3.3Process
DOI: 10.9790/2834-10324956
www.iosrjournals.org
51 | Page
An Efficient Noise Removing Technique Using Mdbut Filter in Images
Select 2-D window of size 3x3.
If this pixel value lies between 15 and 230, pixel. So, no processing is required and its value is left unchanged
If Pij = 0 or 255, it indicates that the pixel is corrupted by salt and pepper noise .
Apply mean to the window containing all 0s and 255s.
If Pij =0 to 15, indicate it as low intensity noise pixels and apply median to it.
If Pij=230 to 255,indicate it as high intensity noise pixels and apply median to it.
Apply the steps 1 to 3 for all the pixels in the image for complete processing.
If the selected window contains salt/pepper noise as processing pixel
(i.e., 255/0 pixel value) and neighbouring pixel values contains all pixels that adds salt and pepper noise to the
image:
An Efficient Noise Removing Technique Using Mdbut Filter In Images
Table 1: Where 255 is processing pixel P (i,j)
Since all the elements surrounding are 255s & 0s. It will be either 0 or 255 which is again noisy, if one takes
the median value. To solve this problem, the processing pixel is replaced by the mean value & the mean of the
selected window is found. Here the mean value is 170.Replace the processing pixel by 170.
Case (ii): If the selected window contains salt or pepper noise as processing pixel (i.e., 255/0 pixel value) and
neighbouring pixel values contains some pixels that adds salt (i.e., 255 pixel value) and pepper noise to the
image:
Table 2: Where 0 is processing pixel P (i, j)
Now eliminate the salt and pepper noise from the selected window. That is, elimination of 0s and
255s. The 1-D array of the above matrix is [78 90 0 120 0 255 97 255 73]. After elimination of 0s and 255s
the pixel values in the selected Window will be [78 90 120 97 73]. Here the median value is 90. Hence replace
the processing pixel by 90.
Case (iii): If the selected window contains a noise free pixel as a processing pixel, it does not require further
processing. For example, if the processing pixel is 90 then it is noise free pixel: Since 90 is a noise free pixel
it does not require further processing.
Table3
Each and every pixel of the image is checked for the presence of salt and pepper noise. Different cases are
illustrated in this Section. If the processing pixel is noisy and all other pixel values are either 0s or 255s is
DOI: 10.9790/2834-10324956
www.iosrjournals.org
52 | Page
An Efficient Noise Removing Technique Using Mdbut Filter in Images
An Efficient Noise Removing Technique Using Mdbut Filter In Images
illustrated inCase (i). If the processing pixel is noisy pixel that is 0 or255 is illustrated in Case (ii).If the
processing pixel is not noisy pixel and its value lies between 0 and 255 is illustrated in Case (iii).
3.4a modified decision based unsymmetrical trimmed median filter
A Modified Decision Based Unsymmetrical Trimmed Median Filter (MDBUTMF) is proposed for the
restoration of colour images that are highly corrupted by salt and pepper noise. The proposed filter
(MDBUTMF) replaces the noisy pixel by trimmed median value when some of the elements with values 0s and
255s are present in the selected window. If all the pixel values in the selected window are 0s and 255s means
then the noisy pixel is replaced by mean value of all the elements present in that selected window.
In the proposed method first the noisy image is read then based on some decision salt and pepper noise
detection takes place. At the end of the detection stage the noisy and noise-free pixels get separated. The noisefree pixel is left unchanged and the noisy pixel is given to the Modified Decision Based Unsymmetric Trimmed
Median Filter (MDBUTMF). The MDBUTMF produces an image as its throughput that is a noise removed one.
Fig3: Flow of the proposed algorithm
The data flow of the proposed method is shown in Fig.3.4.1. The flow goes in the way that, first the
noisy image is given to a noisy image reader. Followed by this is the salt and pepper noise detection. After this,
based on the state of the elements the corrupted pixel is either replaced by Type-I or replaced by Type-II.
Type-I): If the selected window contains all the elements as 0s and 255s means, then replace the
processing pixel by the mean value of the elements present in that window. Type-II): If the selected window
contains not all elements as 0s and 255s. Then eliminate 0s and 255s and find the median value of the
remaining elements. Replace the processing pixel with the median value. The clear explanation of Type-I and
Type-II with examples is given in this Section. The output images produced by the combination of Modified
Decision Based Unsymmetrical Trimmed Median Filter (MDBUTMF) contain excellent Result than the existing
methods.
The proposed Modified Decision Based Unsymmetrical Trimmed Median Filter (MDBUTMF)
algorithm processes the corrupted images by first detecting the impulse noise. The processing pixel is checked
whether it is noisy or noisy free. That is, if the processing pixel lies between maximum and minimum gray level
values then it is noise free pixel, it is left unchanged. If the processing pixel takes the maximum or minimum
gray level then it is noisy pixel which is processed by MDBUTMF.
3.5Algorithm
Step 1: Select 2-D window of size 3X 3. Assume that the pixel being processed is
Step 2: If
then is an uncorrupted pixel and its value is left unchanged. This is illustrated in
Case iii) of Section Illustration of MDBUTM Filter.
Step 3: if is a corrupted pixel then two cases are possible as given in Case i) and ii).
Case i): If the selected window contains all the elements as 0s and 255s. Then replace
with the mean of
the element of window. Case ii): If the selected window contains not all elements as 0s and 255s .Then
eliminate 255s and 0s and find the median value of the remaining elements. Replace with the median value.
Step 4: Repeat steps 1 to 3 until all the pixels in the entire image are processed. The pictorial representation of
each case of the proposed algorithm is shown in Fig. The detailed description of each case of the flow chart
shown in Fig.1 is illustrated through an example in Section Illustration of MDBUT Filter.
3.6Illustration of mdbut filte:
Each and every pixel of the image is checked for the presence of salt and pepper noise. Different cases
are illustrated in this Section. If the processing pixel is noisy and all other pixel values are either 0s or 255s is
DOI: 10.9790/2834-10324956
www.iosrjournals.org
53 | Page
An Efficient Noise Removing Technique Using Mdbut Filter in Images
illustrated in Case i). If the processing pixel is noisy pixel that is 0 or 255 is illustrated in Case ii). If the
processing pixel is not noisy pixel and its value lies between 0 and 255 is illustrated in Case iii). Case i): If the
selected window contains salt/pepper noise as processing pixel (i.e., 255/0 pixel value) and neighboring pixel
values contains all pixels that adds salt and pepper noise to the image:
Where 255 is processing pixel, i.e., .
Since all the elements surrounding
are 0s and 255s. If one takes the median value it will be either 0 or
255 which is again noisy. To solve this problem, the mean of the selected window is found and the processing
pixel is replaced by the mean value. Here the mean value is 170. Replace the processing pixel by 170.
Case ii): If the selected window contains salt or pepper noise as processing pixel (i.e., 255/0 pixel value) and
neighbouring pixel values contains some pixels that adds salt (i.e., 255 pixel value) and pepper noise to the
image:
Where 0 is processing pixel, i.e.,
. Now eliminate the salt and pepper
noise from the selected window. That is, elimination of 0s and 255s. The 1- D array of the above matrix is [78
90 0 120 0 255 97 255 73]. After elimination of 0s and 255s the pixel values in the selected window will be
[78 90 120 97 73]. Here the median value is 90. Hence replace the processing pixel by 90. Case iii): If the
selected window contains a noise free pixel as a processing pixel, it does not require further processing. For
example, if the processing pixel is 90 then it is noise free pixel:
Where 90 is processing pixel, i.e.
DOI: 10.9790/2834-10324956
, since 90 is a noise free pixel it does not require further processing
www.iosrjournals.org
54 | Page
An Efficient Noise Removing Technique Using Mdbut Filter in Images
Fig: 2.1.5: flow decision based selection
IV.
Conclusion
In this project, we have presented a new efficient decision-based filter, the multiple thresholds
switching filter, for image restoration. Because the new impulse detection mechanism can accurately tell where
noise is, only the noise-corrupted pixels are replaced with the estimated central noise-free ordered mean value or
median value. As a result, the restored images can preserve perceptual details and edges in the image while
effectively suppressing impulse noise. The experimental results included in this project have demonstrated that
the proposed filter significantly outperforms a number of well-accepted decision- based filters.
The implementation of 128x128 bits image can be extended to 256x256 and so. This can give a wide
range of applications in various fields to transfer a noiseless and lossless image even in large size images.
V.
Total Results
Noisy image
Noise removed image
Fig 8: Image after noise is removed using MDBUT Filter.
DOI: 10.9790/2834-10324956
www.iosrjournals.org
55 | Page
An Efficient Noise Removing Technique Using Mdbut Filter in Images
References
Journal Papers:
[1].
[2].
[3].
[4].
K. Arakawa, Median filters based on fuzzy rules and its application to image restoration, Fuzzy Sets and Systems, Vol. 77, 1996,
pp. 3-13.
G. Pok, J. C. Liu, and A. S. Nair, Selective removal of impulse noise based on homogeneity level information, IEEE Transactions
on Image Processing, Vol. 12, 2003, pp. 85-92.
F. Russo, FIRE operators for image processing, Fuzzy Sets and Systems, Vol. 103, 1999, pp. 265-275.
T. C. Lin and P. T. Yu, Adaptive two-pass median filter based on support vector machine for image restoration, Neural
Computation, Vol. 16, 2004, pp. 333-354.
Author Profile
S. Kishor Krishna Kumar received the B.TECH. And M.TECH.Degree in Electronics and
CommunicationEngineering from JNTUH in 2004 and 2008, respectively.Obtained Gold Medal in M.tech.
Interested in IMAGE PROCESSING, VLSI.
Author Profile
Mennaiah Batta received the B.TECH. And M.TECH.Degree in Electronics and
Communication Engineering from IIT kharagpur . Interested in IMAGE PROCESSING, VLSI.
DOI: 10.9790/2834-10324956
www.iosrjournals.org
56 | Page
S-ar putea să vă placă și
- Socio-Ethical Impact of Turkish Dramas On Educated Females of Gujranwala-PakistanDocument7 paginiSocio-Ethical Impact of Turkish Dramas On Educated Females of Gujranwala-PakistanInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- The Role of Extrovert and Introvert Personality in Second Language AcquisitionDocument6 paginiThe Role of Extrovert and Introvert Personality in Second Language AcquisitionInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- "I Am Not Gay Says A Gay Christian." A Qualitative Study On Beliefs and Prejudices of Christians Towards Homosexuality in ZimbabweDocument5 pagini"I Am Not Gay Says A Gay Christian." A Qualitative Study On Beliefs and Prejudices of Christians Towards Homosexuality in ZimbabweInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- The Impact of Technologies On Society: A ReviewDocument5 paginiThe Impact of Technologies On Society: A ReviewInternational Organization of Scientific Research (IOSR)100% (1)
- A Proposed Framework On Working With Parents of Children With Special Needs in SingaporeDocument7 paginiA Proposed Framework On Working With Parents of Children With Special Needs in SingaporeInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Attitude and Perceptions of University Students in Zimbabwe Towards HomosexualityDocument5 paginiAttitude and Perceptions of University Students in Zimbabwe Towards HomosexualityInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- A Review of Rural Local Government System in Zimbabwe From 1980 To 2014Document15 paginiA Review of Rural Local Government System in Zimbabwe From 1980 To 2014International Organization of Scientific Research (IOSR)Încă nu există evaluări
- Investigation of Unbelief and Faith in The Islam According To The Statement, Mr. Ahmed MoftizadehDocument4 paginiInvestigation of Unbelief and Faith in The Islam According To The Statement, Mr. Ahmed MoftizadehInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- The Lute Against Doping in SportDocument5 paginiThe Lute Against Doping in SportInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- An Evaluation of Lowell's Poem "The Quaker Graveyard in Nantucket" As A Pastoral ElegyDocument14 paginiAn Evaluation of Lowell's Poem "The Quaker Graveyard in Nantucket" As A Pastoral ElegyInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Assessment of The Implementation of Federal Character in Nigeria.Document5 paginiAssessment of The Implementation of Federal Character in Nigeria.International Organization of Scientific Research (IOSR)Încă nu există evaluări
- Topic: Using Wiki To Improve Students' Academic Writing in English Collaboratively: A Case Study On Undergraduate Students in BangladeshDocument7 paginiTopic: Using Wiki To Improve Students' Academic Writing in English Collaboratively: A Case Study On Undergraduate Students in BangladeshInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Edward Albee and His Mother Characters: An Analysis of Selected PlaysDocument5 paginiEdward Albee and His Mother Characters: An Analysis of Selected PlaysInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Comparative Visual Analysis of Symbolic and Illegible Indus Valley Script With Other LanguagesDocument7 paginiComparative Visual Analysis of Symbolic and Illegible Indus Valley Script With Other LanguagesInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Relationship Between Social Support and Self-Esteem of Adolescent GirlsDocument5 paginiRelationship Between Social Support and Self-Esteem of Adolescent GirlsInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Transforming People's Livelihoods Through Land Reform in A1 Resettlement Areas in Goromonzi District in ZimbabweDocument9 paginiTransforming People's Livelihoods Through Land Reform in A1 Resettlement Areas in Goromonzi District in ZimbabweInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Importance of Mass Media in Communicating Health Messages: An AnalysisDocument6 paginiImportance of Mass Media in Communicating Health Messages: An AnalysisInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Human Rights and Dalits: Different Strands in The DiscourseDocument5 paginiHuman Rights and Dalits: Different Strands in The DiscourseInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Designing of Indo-Western Garments Influenced From Different Indian Classical Dance CostumesDocument5 paginiDesigning of Indo-Western Garments Influenced From Different Indian Classical Dance CostumesIOSRjournalÎncă nu există evaluări
- Beowulf: A Folktale and History of Anglo-Saxon Life and CivilizationDocument3 paginiBeowulf: A Folktale and History of Anglo-Saxon Life and CivilizationInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Role of Madarsa Education in Empowerment of Muslims in IndiaDocument6 paginiRole of Madarsa Education in Empowerment of Muslims in IndiaInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Micro Finance and Women - A Case Study of Villages Around Alibaug, District-Raigad, Maharashtra, IndiaDocument3 paginiMicro Finance and Women - A Case Study of Villages Around Alibaug, District-Raigad, Maharashtra, IndiaInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- An Exploration On The Relationship Among Learners' Autonomy, Language Learning Strategies and Big-Five Personality TraitsDocument6 paginiAn Exploration On The Relationship Among Learners' Autonomy, Language Learning Strategies and Big-Five Personality TraitsInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Classical Malay's Anthropomorphemic Metaphors in Essay of Hikajat AbdullahDocument9 paginiClassical Malay's Anthropomorphemic Metaphors in Essay of Hikajat AbdullahInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Women Empowerment Through Open and Distance Learning in ZimbabweDocument8 paginiWomen Empowerment Through Open and Distance Learning in ZimbabweInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Substance Use and Abuse Among Offenders Under Probation Supervision in Limuru Probation Station, KenyaDocument11 paginiSubstance Use and Abuse Among Offenders Under Probation Supervision in Limuru Probation Station, KenyaInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Motivational Factors Influencing Littering in Harare's Central Business District (CBD), ZimbabweDocument8 paginiMotivational Factors Influencing Littering in Harare's Central Business District (CBD), ZimbabweInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- A Study On The Television Programmes Popularity Among Chennai Urban WomenDocument7 paginiA Study On The Television Programmes Popularity Among Chennai Urban WomenInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Kinesics, Haptics and Proxemics: Aspects of Non - Verbal CommunicationDocument6 paginiKinesics, Haptics and Proxemics: Aspects of Non - Verbal CommunicationInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Design Management, A Business Tools' Package of Corporate Organizations: Bangladesh ContextDocument6 paginiDesign Management, A Business Tools' Package of Corporate Organizations: Bangladesh ContextInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
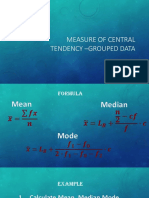
- Measure of Central Tendency - Grouped DataDocument15 paginiMeasure of Central Tendency - Grouped DataEmily Grace OralloÎncă nu există evaluări
- ASTM E1617 - 09 Reporting Particle Size Characterization DataDocument7 paginiASTM E1617 - 09 Reporting Particle Size Characterization DataLaura Ximena GiraldoÎncă nu există evaluări
- Lecture Introductory Econometrics For Finance: Chapter 4 - Chris BrooksDocument52 paginiLecture Introductory Econometrics For Finance: Chapter 4 - Chris BrooksDuy100% (1)
- Pmi Salary Survey 12th Edition Members FinalDocument300 paginiPmi Salary Survey 12th Edition Members FinalShahram KarimiÎncă nu există evaluări
- BIOC 604 Biostatistics IntroductionDocument25 paginiBIOC 604 Biostatistics Introductionنايف محمد القباتليÎncă nu există evaluări
- Exercise Set 1Document5 paginiExercise Set 1christianÎncă nu există evaluări
- Data Smoothing Functions in MathcadDocument13 paginiData Smoothing Functions in Mathcaddan-gabiÎncă nu există evaluări
- Ambit Strategy Thematic Tomorrows Ten Baggers 19jan2012Document15 paginiAmbit Strategy Thematic Tomorrows Ten Baggers 19jan2012jainvivekÎncă nu există evaluări
- Robust CUSUM Control Charting PDFDocument15 paginiRobust CUSUM Control Charting PDFCarmen PatinoÎncă nu există evaluări
- Describing Data:: Numerical MeasuresDocument52 paginiDescribing Data:: Numerical MeasuresMD.Rakibul HasanÎncă nu există evaluări
- Chapter 2 - Part 1 - Measures of Central Tendency - Practice ProblemsDocument8 paginiChapter 2 - Part 1 - Measures of Central Tendency - Practice ProblemsTejas Joshi0% (3)
- Doane SolutionsDocument291 paginiDoane SolutionsMohammed AliÎncă nu există evaluări
- Paper IIDocument129 paginiPaper IISourabh AgarwalÎncă nu există evaluări
- Matlab CodeDocument7 paginiMatlab CodeOmar Waqas SaadiÎncă nu există evaluări
- BAB 8 KTI Faisal IswandiDocument20 paginiBAB 8 KTI Faisal IswandiSari Ramadana SyukurÎncă nu există evaluări
- General Knowledge Test Information GuideDocument42 paginiGeneral Knowledge Test Information Guideapi-321973122Încă nu există evaluări
- Introduction To Statistics For Data Science: OpensapDocument11 paginiIntroduction To Statistics For Data Science: Opensapkokocodename47Încă nu există evaluări
- Answer: A: Questions & Answers PDFDocument10 paginiAnswer: A: Questions & Answers PDFJasonJoséMartínezGarcíaÎncă nu există evaluări
- PDFDocument100 paginiPDFaditya kumawatÎncă nu există evaluări
- StatisticsDocument272 paginiStatisticsAnonymous hYMWbA100% (2)
- MCQ Practice on Economics TopicsDocument56 paginiMCQ Practice on Economics TopicsDiwakar Entertainment Dose67% (3)
- Descriptive Statistics EDGR 601Document4 paginiDescriptive Statistics EDGR 601Lisa McGuire100% (1)
- Business Statistics MCQsDocument55 paginiBusiness Statistics MCQsAdil ChaudhryÎncă nu există evaluări
- MedianDocument7 paginiMedianBrian RogersÎncă nu există evaluări
- Parenting Style As A Moderator of Locus of Control, Self Esteem and Academic Stress Among AdolescentsDocument11 paginiParenting Style As A Moderator of Locus of Control, Self Esteem and Academic Stress Among Adolescentsharano mamunÎncă nu există evaluări
- Alberto Cairo - How Charts Lie - Getting Smarter About Visual InformationDocument244 paginiAlberto Cairo - How Charts Lie - Getting Smarter About Visual Informationsubba rao100% (10)
- RND TestingDocument49 paginiRND TestingLPomelo7Încă nu există evaluări
- Seatwork: Class Interval Frequenc y Class Boundary CM (X) CF (X-) 2) 2Document3 paginiSeatwork: Class Interval Frequenc y Class Boundary CM (X) CF (X-) 2) 2Melody BersabeÎncă nu există evaluări
- Central tendency and variability measures quiz answersDocument2 paginiCentral tendency and variability measures quiz answersDawn Razonable100% (1)
- Black BeltDocument9 paginiBlack BeltshashankÎncă nu există evaluări