S-ar putea să vă placă și
- Sonic Logging Test PresentationDocument21 paginiSonic Logging Test PresentationYip Ying MunÎncă nu există evaluări
- Specification - Sonic Loging TestDocument3 paginiSpecification - Sonic Loging TestcheekietÎncă nu există evaluări
- Geonamics Cross-Hole Sonic Logging Test PDFDocument84 paginiGeonamics Cross-Hole Sonic Logging Test PDFnw__ay100% (1)
- VWSG Vs Load CellDocument18 paginiVWSG Vs Load Cellfreezefreeze100% (1)
- Crosshole Sonic LoggingDocument28 paginiCrosshole Sonic LoggingUsama KhalidÎncă nu există evaluări
- Non-Destructive Testing of Drilled Shafts - Current Practices andDocument49 paginiNon-Destructive Testing of Drilled Shafts - Current Practices andElvin Cruz100% (1)
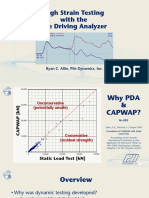
- PDA Test - Result AnalysisDocument13 paginiPDA Test - Result AnalysisNazmul100% (1)
- 2 - Load Testing of Deep FoundationsDocument119 pagini2 - Load Testing of Deep FoundationsTalis BattleÎncă nu există evaluări
- Dynamic Pile TestingDocument4 paginiDynamic Pile TestinglaikienfuiÎncă nu există evaluări
- Cross HoleDocument6 paginiCross HoleSheane GutomanÎncă nu există evaluări
- A Comprehensive Database of Tests on Axially Loaded Piles Driven in SandDe la EverandA Comprehensive Database of Tests on Axially Loaded Piles Driven in SandÎncă nu există evaluări
- Sonic TestDocument2 paginiSonic TestyiklamÎncă nu există evaluări
- Drill Hole Monitoring: © 2004 by STSDocument2 paginiDrill Hole Monitoring: © 2004 by STSLawrence Lee100% (1)
- Socket Friction Micro PileDocument8 paginiSocket Friction Micro PilePalak ShivhareÎncă nu există evaluări
- MS For Pile Integrity Testing-REV01Document55 paginiMS For Pile Integrity Testing-REV01Lijo Joseph100% (1)
- Fellenius - The Analysis of Results From Pile Load TestsDocument10 paginiFellenius - The Analysis of Results From Pile Load TestsFederico MontesverdesÎncă nu există evaluări
- Case Method and The Pda PDFDocument73 paginiCase Method and The Pda PDFStephanie HaynesÎncă nu există evaluări
- Rock-Socketed Large Diameter Bored Pile and Geophysical Survey in Cavernous Karst AreaDocument8 paginiRock-Socketed Large Diameter Bored Pile and Geophysical Survey in Cavernous Karst AreaHilary YÎncă nu există evaluări
- Load Transfer Settlement and Stability of Embankments Founded On Columns Installed by Deep Mixing MethodsDocument35 paginiLoad Transfer Settlement and Stability of Embankments Founded On Columns Installed by Deep Mixing MethodsBeer PhermphornÎncă nu există evaluări
- Downhole Seismic Testing: Standard Test Methods ForDocument10 paginiDownhole Seismic Testing: Standard Test Methods ForJesús Luis Arce GuillermoÎncă nu există evaluări
- Pileload Tes ReportDocument21 paginiPileload Tes ReportMahmudle HassanÎncă nu există evaluări
- PDA CheckDocument2 paginiPDA ChecksinambeladavidÎncă nu există evaluări
- Integrity Test of PileDocument5 paginiIntegrity Test of PileDae Yeol KimÎncă nu există evaluări
- What Constitutes A Good PDA TestDocument7 paginiWhat Constitutes A Good PDA TestMuhammad SyariefÎncă nu există evaluări
- Dynamic Testing Methods of Deep FoundationsDocument52 paginiDynamic Testing Methods of Deep Foundationsgaur79Încă nu există evaluări
- Broucher Pile Integrity TestDocument1 paginăBroucher Pile Integrity TestDeepak Kumar MallickÎncă nu există evaluări
- Dinamik Kazık Testi Dynamic Load TestDocument3 paginiDinamik Kazık Testi Dynamic Load TestHalil Can EryaşarÎncă nu există evaluări
- Macro & Mini PilesDocument1 paginăMacro & Mini PilesAnonymous JZFSB3D0% (1)
- Contract 487: Sonic Logging Test Report FOR Bore Pile BP - Mc140Document7 paginiContract 487: Sonic Logging Test Report FOR Bore Pile BP - Mc140Tuntun TatÎncă nu există evaluări
- Uae Ground ImprovementDocument12 paginiUae Ground ImprovementMuhanad SalemÎncă nu există evaluări
- International Society for Rock Mechanics: List of Members 1980De la EverandInternational Society for Rock Mechanics: List of Members 1980Evaluare: 3.5 din 5 stele3.5/5 (2)
- PIT Presentation PDFDocument21 paginiPIT Presentation PDFAjith RamuÎncă nu există evaluări
- Geotechnical Report GuidelinesDocument8 paginiGeotechnical Report GuidelinesCele Adu-wusuÎncă nu există evaluări
- Bentonite and Polymer Slurry Friction AngleDocument12 paginiBentonite and Polymer Slurry Friction AngleshimantÎncă nu există evaluări
- UGS2011 Application of The Hardening Soil Model in Deep Excavation AnalysisDocument14 paginiUGS2011 Application of The Hardening Soil Model in Deep Excavation AnalysisfreezefreezeÎncă nu există evaluări
- Chpater 82 Piling ProblemsDocument12 paginiChpater 82 Piling ProblemsGan Khai SianÎncă nu există evaluări
- Standard Penetration TestDocument29 paginiStandard Penetration TestYoshua YangÎncă nu există evaluări
- Cross Hole Sonic Test Results For Analysis of Pile Load Test - Advances in Bridge Engineering - Full TextDocument33 paginiCross Hole Sonic Test Results For Analysis of Pile Load Test - Advances in Bridge Engineering - Full Textsantanu mukherjeeÎncă nu există evaluări
- Asia Pile Testing Company Profile PDFDocument73 paginiAsia Pile Testing Company Profile PDFWray TanÎncă nu există evaluări
- Jet GroutingDocument41 paginiJet GroutingArnab SurÎncă nu există evaluări
- Rapid Load Testing of Foundation Piles in Barcelona:: IssueDocument5 paginiRapid Load Testing of Foundation Piles in Barcelona:: IssuebozarromegustaÎncă nu există evaluări
- Triaxial Testing of Granular Soil (Colliat-Dangus, 1988)Document21 paginiTriaxial Testing of Granular Soil (Colliat-Dangus, 1988)Abraham FIgueroa ARevaloÎncă nu există evaluări
- Huang, An-Bin-Geotechnical and Geophysical Site Characterization_ Proceedings of the 3rd International Conference on Site Characterization (ISC'3, Taipei, Taiwan, 1-4 April 2008). BOOK Keynote PapersDocument1.888 paginiHuang, An-Bin-Geotechnical and Geophysical Site Characterization_ Proceedings of the 3rd International Conference on Site Characterization (ISC'3, Taipei, Taiwan, 1-4 April 2008). BOOK Keynote PapersNguyen Nhan100% (1)
- Shear Strength of Soils Final (Complete)Document176 paginiShear Strength of Soils Final (Complete)lcblsc100% (3)
- MS For Sonic Logging - C487Document8 paginiMS For Sonic Logging - C487Anonymous S7Cq7ZDgPÎncă nu există evaluări
- Foundation Engineering: Site InvestigationsDocument62 paginiFoundation Engineering: Site InvestigationssstibisÎncă nu există evaluări
- CV6313 - AY2019-20 L2 - Axial Capacity of A Single Pile PDFDocument100 paginiCV6313 - AY2019-20 L2 - Axial Capacity of A Single Pile PDFLordM00nÎncă nu există evaluări
- Rock SocketDocument17 paginiRock Socketteh100% (1)
- Boiling or Heaving in CofferdamsDocument2 paginiBoiling or Heaving in Cofferdamsslawek780303Încă nu există evaluări
- Elastic Settlement CalculationDocument14 paginiElastic Settlement Calculationbasum matÎncă nu există evaluări
- Final Report, NarayanganjDocument125 paginiFinal Report, NarayanganjNaim ParvejÎncă nu există evaluări
- Pile Dynamic AnalysisDocument24 paginiPile Dynamic AnalysisMark ObcianaÎncă nu există evaluări
- Bearing Capacity Calculation of Rock Foundation Based On Nonlinear Failure CriterionDocument7 paginiBearing Capacity Calculation of Rock Foundation Based On Nonlinear Failure CriterionSpasenÎncă nu există evaluări
- Capwap PdcaDocument44 paginiCapwap PdcaPungge Prima Huwa100% (1)
- Geotechnical Investigations For BridgesDocument45 paginiGeotechnical Investigations For BridgeskesharinareshÎncă nu există evaluări
- Method Statement For Sonic Logging Test-naga3-Rev.01-Dc230321Document24 paginiMethod Statement For Sonic Logging Test-naga3-Rev.01-Dc230321Shafiq ZakariahÎncă nu există evaluări
- Effects of Shear Box Size On The Strength For Different Type of Silty Sands in Direct Shear TestsDocument7 paginiEffects of Shear Box Size On The Strength For Different Type of Silty Sands in Direct Shear TestsJavier MtÎncă nu există evaluări
- PILE LOAD TEST REPORT BR 22 InitialDocument33 paginiPILE LOAD TEST REPORT BR 22 InitialMohabbatÎncă nu există evaluări
- Geotechnical Engineering ReportDocument25 paginiGeotechnical Engineering ReportAbdullah YucesoyÎncă nu există evaluări
- Cube Strength-1Document1 paginăCube Strength-1Joe ArmandaÎncă nu există evaluări
- Web - Ead.anl - Gov Resrad Datacoll PorosityDocument4 paginiWeb - Ead.anl - Gov Resrad Datacoll PorosityJoe ArmandaÎncă nu există evaluări
- Shear Testing MachineDocument2 paginiShear Testing MachineJoe Armanda100% (2)
- Consultancy Group Co.: Direct Shear Test - ASTM D3080Document12 paginiConsultancy Group Co.: Direct Shear Test - ASTM D3080Joe ArmandaÎncă nu există evaluări
- Consultancy Group Co.: Direct Shear Test - ASTM D3080Document12 paginiConsultancy Group Co.: Direct Shear Test - ASTM D3080Joe ArmandaÎncă nu există evaluări
- E-109 - CHEC (FDT & Soil Lab Tests) Price ListDocument1 paginăE-109 - CHEC (FDT & Soil Lab Tests) Price ListJoe ArmandaÎncă nu există evaluări
- Pile and Shaft Integrity Test Results, Classification, Acceptance And/or RejectionDocument11 paginiPile and Shaft Integrity Test Results, Classification, Acceptance And/or RejectionJoe ArmandaÎncă nu există evaluări
- EarthingDocument40 paginiEarthingmamoun_hammad7917Încă nu există evaluări
- Comparison Sheet - Lab Type ADocument16 paginiComparison Sheet - Lab Type AJoe ArmandaÎncă nu există evaluări
- Sample Mentor Visit ReportDocument5 paginiSample Mentor Visit ReportJoe ArmandaÎncă nu există evaluări
- Description For New Boreholes in JODocument1 paginăDescription For New Boreholes in JOJoe ArmandaÎncă nu există evaluări
- Lecture 4 Subgrade 2006Document11 paginiLecture 4 Subgrade 2006Sidney MusondaÎncă nu există evaluări
- 77-t (Kuwait Desert Soil Properties and Genesis)Document4 pagini77-t (Kuwait Desert Soil Properties and Genesis)Joe ArmandaÎncă nu există evaluări
- Memorandum: INFORMATION: "Drilled ShaftsDocument2 paginiMemorandum: INFORMATION: "Drilled ShaftsJoe ArmandaÎncă nu există evaluări
- Readmeread MeDocument13 paginiReadmeread MeJoe ArmandaÎncă nu există evaluări
- StructuralElementsofOnshoreKuwait SmallDocument28 paginiStructuralElementsofOnshoreKuwait SmallJoe ArmandaÎncă nu există evaluări
- Chapter 2 KinematicDocument11 paginiChapter 2 KinematicHu XiaoÎncă nu există evaluări
- S.zaucha Curriculum ProjectDocument54 paginiS.zaucha Curriculum ProjectKavita GuptaÎncă nu există evaluări
- Atomic TheoryDocument2 paginiAtomic TheorybabeÎncă nu există evaluări
- ARAHANDocument9 paginiARAHANSanjana AnjaÎncă nu există evaluări
- Chem Lab (Interpretation)Document2 paginiChem Lab (Interpretation)CyberR.DomingoÎncă nu există evaluări
- Navier Stokes PDFDocument22 paginiNavier Stokes PDFKhirupasagar RavibaskarÎncă nu există evaluări
- Diff Equation 2 2011-Fall TheoryDocument48 paginiDiff Equation 2 2011-Fall TheoryAna CristacheÎncă nu există evaluări
- Davidson Moreira, Marco Vilhena - Air Pollution and Turbulence - Modeling and Applications (2009, CRC Press)Document336 paginiDavidson Moreira, Marco Vilhena - Air Pollution and Turbulence - Modeling and Applications (2009, CRC Press)Paulina MorenoÎncă nu există evaluări
- What Is The Relation Between Gauge Pressure Absolute Pressure Atmospheric Pressure and Vacuum Pressure - QuoraDocument3 paginiWhat Is The Relation Between Gauge Pressure Absolute Pressure Atmospheric Pressure and Vacuum Pressure - QuoraMauliÎncă nu există evaluări
- BIO 120 Exer 7Document4 paginiBIO 120 Exer 7Asi Jen100% (1)
- Neuman and MorgensternDocument32 paginiNeuman and Morgensternvadim3108Încă nu există evaluări
- CurriculumDocument2 paginiCurriculumPlatoon Nicart BejerÎncă nu există evaluări
- As 6 Control Charts For AttributesDocument32 paginiAs 6 Control Charts For AttributesRoque Estrada100% (1)
- Lab ReportDocument5 paginiLab ReportDhashJoshiÎncă nu există evaluări
- Curve Sketching Test - Multiple Choice ADocument6 paginiCurve Sketching Test - Multiple Choice Agarth5100% (2)
- New Geometric-Arithmetic Indices: Piotr WilczekDocument50 paginiNew Geometric-Arithmetic Indices: Piotr WilczekTache Alexandru-PetreÎncă nu există evaluări
- .Archivetemptest 3 - Sieve Analysis of SoilDocument11 pagini.Archivetemptest 3 - Sieve Analysis of SoilSadon B AsyÎncă nu există evaluări
- Corrosion Measurement Techniques in Steel ReinforcedDocument15 paginiCorrosion Measurement Techniques in Steel ReinforcedVidhun RavindranÎncă nu există evaluări
- Me6301 Engineering Thermodynamics Lecture Notes PDFDocument139 paginiMe6301 Engineering Thermodynamics Lecture Notes PDFvenkat_mie1080100% (2)
- (Draft) Guideline For Handling, Storage and Transport of EquipmentDocument5 pagini(Draft) Guideline For Handling, Storage and Transport of EquipmentAnonymous QqPWzcopI100% (2)
- The Deformation Modulus of Rock MassesDocument19 paginiThe Deformation Modulus of Rock Massesgandha syah putraÎncă nu există evaluări
- Chapter 2 - DimensioningDocument154 paginiChapter 2 - Dimensioningsaded05Încă nu există evaluări
- Physics ProjectDocument9 paginiPhysics Projectapi-227406051Încă nu există evaluări
- Time Current SelectivityDocument13 paginiTime Current SelectivityvodnjanacÎncă nu există evaluări
- MMC 16Document1 paginăMMC 16Muhammad Raihan BalfasÎncă nu există evaluări
- Example 1 - Plane Areas in Rectangular Coordinates - Integral Calculus ReviewDocument6 paginiExample 1 - Plane Areas in Rectangular Coordinates - Integral Calculus ReviewRomeo VictorÎncă nu există evaluări
- Modified Hilpert Correlation For Turbulent Convective Heat Transfer From A NACA AirfoilDocument9 paginiModified Hilpert Correlation For Turbulent Convective Heat Transfer From A NACA AirfoiltazmaneasÎncă nu există evaluări
- Virial Equation Version 2Document24 paginiVirial Equation Version 2Haseeb LashariÎncă nu există evaluări