S-ar putea să vă placă și
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- 02 The Chemistry of Milk PDFDocument26 pagini02 The Chemistry of Milk PDFTintin Brusola SalenÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- ActngDocument2 paginiActngTintin Brusola SalenÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Bubble CapDocument2 paginiBubble CapTintin Brusola SalenÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- 03 Rheology PDFDocument10 pagini03 Rheology PDFTintin Brusola SalenÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Primary Production of Milk: Dairy Processing Handbook/Chapter 1Document16 paginiPrimary Production of Milk: Dairy Processing Handbook/Chapter 1Smaranda CerbuÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- FinDocument4 paginiFinTintin Brusola Salen67% (3)
- MKTGDocument2 paginiMKTGTintin Brusola SalenÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- 1 - Tsunami Advisory - Mexico - 080817-1Document1 pagină1 - Tsunami Advisory - Mexico - 080817-1Tintin Brusola SalenÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Appendix IDocument10 paginiAppendix ITintin Brusola SalenÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Vary A PH Caco3 B PH Tahong C Dosage Caco3 D Dosage Tahong E Optimum Caco3 at 3 and 4 G Tahong at 3 and 4 G F Caco3 Detetahong G Caco3Document12 paginiVary A PH Caco3 B PH Tahong C Dosage Caco3 D Dosage Tahong E Optimum Caco3 at 3 and 4 G Tahong at 3 and 4 G F Caco3 Detetahong G Caco3Tintin Brusola SalenÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- 01 Integration by Parts - HandoutDocument12 pagini01 Integration by Parts - Handout0111001110% (2)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Nistal RegidorDocument15 paginiNistal RegidorTintin Brusola SalenÎncă nu există evaluări
- The South China Sea The Struggle For Power in AsiaDocument4 paginiThe South China Sea The Struggle For Power in AsiaTintin Brusola SalenÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Sy M Bo Lab: StepsDocument11 paginiSy M Bo Lab: StepsTintin Brusola SalenÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Sy M Bo Lab: StepsDocument12 paginiSy M Bo Lab: StepsTintin Brusola SalenÎncă nu există evaluări
- Succession PPSXDocument18 paginiSuccession PPSXTintin Brusola SalenÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Sy M Bo Lab: SolutionDocument6 paginiSy M Bo Lab: SolutionTintin Brusola SalenÎncă nu există evaluări
- Result: Z 3x 7x 56 (X 3) (X + 4x + 29) DX 10 LN X + 4 X + 29 + Arctan 5 LN (X 3) 5Document1 paginăResult: Z 3x 7x 56 (X 3) (X + 4x + 29) DX 10 LN X + 4 X + 29 + Arctan 5 LN (X 3) 5Tintin Brusola SalenÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Sy M Bo Lab: StepsDocument5 paginiSy M Bo Lab: StepsTintin Brusola SalenÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Result: (Sec (X) ) (Tan (X) ) DX 2 Tan X 5 Tan X + 18 Tan X + 45 45Document1 paginăResult: (Sec (X) ) (Tan (X) ) DX 2 Tan X 5 Tan X + 18 Tan X + 45 45Tintin Brusola SalenÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Sy M Bo Lab: StepsDocument6 paginiSy M Bo Lab: StepsTintin Brusola SalenÎncă nu există evaluări
- Biology Textbook PDFDocument768 paginiBiology Textbook PDFTintin Brusola Salen75% (4)
- Structure, Transcription and EditingDocument12 paginiStructure, Transcription and EditingTintin Brusola SalenÎncă nu există evaluări
- PhotosynthesisDocument13 paginiPhotosynthesisTintin Brusola SalenÎncă nu există evaluări
- Translation: Protein From mRNADocument9 paginiTranslation: Protein From mRNATintin Brusola SalenÎncă nu există evaluări
- Skeletal SystemDocument7 paginiSkeletal SystemTintin Brusola SalenÎncă nu există evaluări
- MutationsDocument12 paginiMutationsTintin Brusola SalenÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
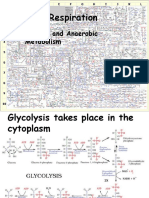
- Cellular Respiration: Aerobic and Anaerobic MetabolismDocument12 paginiCellular Respiration: Aerobic and Anaerobic MetabolismTintin Brusola SalenÎncă nu există evaluări
- Sex LinkedDocument9 paginiSex LinkedTintin Brusola SalenÎncă nu există evaluări
- RespiratorySystem PPSXDocument6 paginiRespiratorySystem PPSXTintin Brusola SalenÎncă nu există evaluări
- Note 9 Stability: Lecture Notes of Control Systems I - ME 431/analysis and Synthesis of Linear Control System - ME862Document11 paginiNote 9 Stability: Lecture Notes of Control Systems I - ME 431/analysis and Synthesis of Linear Control System - ME862dhineshpÎncă nu există evaluări
- 2015 Book AeroservoelasticityDocument323 pagini2015 Book Aeroservoelasticityarviandy100% (1)
- L06 FiltersDocument36 paginiL06 Filtersفراس فراس فراسÎncă nu există evaluări
- Improve Control of Liquid Level LoopsDocument8 paginiImprove Control of Liquid Level LoopsSyed Samir AlamÎncă nu există evaluări
- Pid Controller Design and TuningDocument33 paginiPid Controller Design and TuningfaqihÎncă nu există evaluări
- Xiros N Robust Control of Diesel Ship PropulsionDocument221 paginiXiros N Robust Control of Diesel Ship PropulsionNicolás SadmanÎncă nu există evaluări
- DC Motor ControlDocument123 paginiDC Motor ControlMarlon Boucaud100% (1)
- Appnote 39 EDocument23 paginiAppnote 39 Eespelec_danielÎncă nu există evaluări
- McMaster - Intro To Linear Control SystemsDocument437 paginiMcMaster - Intro To Linear Control SystemsAndre GomesÎncă nu există evaluări
- Re95203 2007-11 PDFDocument20 paginiRe95203 2007-11 PDFrenatÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Design and Simulation of A Neural Controller For MIMO SystemsDocument11 paginiDesign and Simulation of A Neural Controller For MIMO SystemsJulio Cesar SoSaavedraÎncă nu există evaluări
- HVAC - Equipment ScheduleDocument1 paginăHVAC - Equipment ScheduleRommel Dela SernaÎncă nu există evaluări
- 15Document5 pagini15Vladimir CevallosÎncă nu există evaluări
- ECE320 StudyGuideDocument262 paginiECE320 StudyGuideTumenbayar LkhagvatserenÎncă nu există evaluări
- (Applied Optimization 81) Natali Hritonenko, Yuri Yatsenko (Auth.) - Applied Mathematical Modelling of Engineering Problems-Springer US (2003)Document307 pagini(Applied Optimization 81) Natali Hritonenko, Yuri Yatsenko (Auth.) - Applied Mathematical Modelling of Engineering Problems-Springer US (2003)brunodefigueiredo3302100% (1)
- Introduction To Chemical Process Dynamics and Control: Dr. Farooq AhmadDocument44 paginiIntroduction To Chemical Process Dynamics and Control: Dr. Farooq AhmadAhmadJaffarGulfarazÎncă nu există evaluări
- Simultaneous Closed-Loop Automatic Tuning Method For Cascade ControllersDocument8 paginiSimultaneous Closed-Loop Automatic Tuning Method For Cascade ControllersAl-ShukaÎncă nu există evaluări
- Fir Filters ReportDocument8 paginiFir Filters ReportGaneshVenkatachalamÎncă nu există evaluări
- MA3005 Lecture 12Document22 paginiMA3005 Lecture 12Leroy LiauÎncă nu există evaluări
- Basic Concept of Process Control SystemDocument29 paginiBasic Concept of Process Control Systemhabtemariam mollaÎncă nu există evaluări
- Stability: Solutions To Case Studies ChallengesDocument50 paginiStability: Solutions To Case Studies Challenges廖偉丞Încă nu există evaluări
- Chapter 1 Introduction To Control SystemDocument32 paginiChapter 1 Introduction To Control SystemZiad ObeidÎncă nu există evaluări
- Hard MainDocument36 paginiHard MainkÎncă nu există evaluări
- Lecture 7 and 8 Transients and Control SystemDocument38 paginiLecture 7 and 8 Transients and Control SystemRaisul Haque RahatÎncă nu există evaluări
- Marlin Ch13Document44 paginiMarlin Ch13Ashwin Kumar SabatÎncă nu există evaluări
- Lec#02 PDC - Design Aspects of A Process Control SystemDocument19 paginiLec#02 PDC - Design Aspects of A Process Control SystemqamarVEXÎncă nu există evaluări
- 9, Frequency Response 2 Bode Plot PDFDocument29 pagini9, Frequency Response 2 Bode Plot PDFwasif karimÎncă nu există evaluări
- TDC Funktion e PDFDocument32 paginiTDC Funktion e PDFAllan CorreaÎncă nu există evaluări
- Quasi Equilibrium State PendulumDocument22 paginiQuasi Equilibrium State PendulumDavid MorenoÎncă nu există evaluări
- Computer Integrated ManufacturingDocument153 paginiComputer Integrated Manufacturingscott_DickersonÎncă nu există evaluări