S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Service Manual 900 OG Factory 16V M85-M93Document572 paginiService Manual 900 OG Factory 16V M85-M93Sting Eyes100% (1)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- ECU Designing and Testing Using NI ProductsDocument6 paginiECU Designing and Testing Using NI ProductsOmar Eladel MahmoudÎncă nu există evaluări
- Laptop Power SequenceDocument16 paginiLaptop Power SequenceDelwar Hossain90% (10)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Introspective Hypnosis Class - 052017 - Antonio Sangio (2745)Document62 paginiIntrospective Hypnosis Class - 052017 - Antonio Sangio (2745)sandra100% (4)
- The Stress Relief PrescriptionDocument8 paginiThe Stress Relief PrescriptionRajesh KumarÎncă nu există evaluări
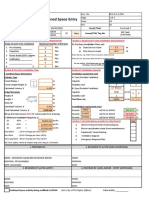
- Ventilation Plan For Confined Space EntryDocument9 paginiVentilation Plan For Confined Space EntryMohamad Nazmi Mohamad Rafian100% (1)
- Ecco ADocument5 paginiEcco Aouzun852Încă nu există evaluări
- Book 3 - Revised 2017-2Document41 paginiBook 3 - Revised 2017-2sales zfÎncă nu există evaluări
- 5054 s09 QP 1Document20 pagini5054 s09 QP 1Hany ElGezawyÎncă nu există evaluări
- DHP UM 015 IHP24 HART User ManualDocument70 paginiDHP UM 015 IHP24 HART User Manualkumar ambujÎncă nu există evaluări
- Philips 170v7fbDocument95 paginiPhilips 170v7fbaposticaaÎncă nu există evaluări
- Spatial Personality For Human Space InteractionDocument10 paginiSpatial Personality For Human Space Interactionavijitsaha bornoÎncă nu există evaluări
- Hypac C 766 C 778Document4 paginiHypac C 766 C 778Dave100% (1)
- Anagrams in Enhancing The Learner's Vocabolary in Filipino Language Using WordwallDocument19 paginiAnagrams in Enhancing The Learner's Vocabolary in Filipino Language Using WordwallJARYL PILLAZARÎncă nu există evaluări
- 9608/21/M/J/15 © Ucles 2015Document57 pagini9608/21/M/J/15 © Ucles 2015Asilbek AshurovÎncă nu există evaluări
- Event Rulebook Authorsgate 3.0 IEEE SB KUETDocument9 paginiEvent Rulebook Authorsgate 3.0 IEEE SB KUETKUET²⁰²¹Încă nu există evaluări
- A Study On Consumer Preference Towards Skincare With Special Reference To Himalaya Herbal Products in Nilambur at Malappuram District of KeralaDocument4 paginiA Study On Consumer Preference Towards Skincare With Special Reference To Himalaya Herbal Products in Nilambur at Malappuram District of Keralaarcherselevators50% (2)
- Sae Technical Paper Series 2015-36-0353: Static and Dynamic Analysis of A Chassis of A Prototype CarDocument12 paginiSae Technical Paper Series 2015-36-0353: Static and Dynamic Analysis of A Chassis of A Prototype CarGanesh KCÎncă nu există evaluări
- Keurig Gourmet Single Cup Home Brewing System: Section 1Document11 paginiKeurig Gourmet Single Cup Home Brewing System: Section 1Tijuan MuhammadÎncă nu există evaluări
- #1 Introduction To C LanguageDocument6 pagini#1 Introduction To C LanguageAtul SharmaÎncă nu există evaluări
- Original Prusa I3 MK2S To MK3 Upgrade Parts ListDocument2 paginiOriginal Prusa I3 MK2S To MK3 Upgrade Parts ListLuan AlvesÎncă nu există evaluări
- OhmDocument15 paginiOhmRhonnel Manatad Alburo88% (17)
- VSP BrochureDocument33 paginiVSP BrochuresudhakarrrrrrÎncă nu există evaluări
- Pengaruh Komunikasi DGN KinerjaDocument15 paginiPengaruh Komunikasi DGN KinerjaTitHa AwallunnisaÎncă nu există evaluări
- A Simple Method To Transfer The SelectedDocument2 paginiA Simple Method To Transfer The SelectedrekabiÎncă nu există evaluări
- Languages and CommunicationDocument17 paginiLanguages and CommunicationDERICK REBAYÎncă nu există evaluări
- Materi HAZOP Dan Relevansi Terhadap ASME Dan APIDocument9 paginiMateri HAZOP Dan Relevansi Terhadap ASME Dan APIAhmad KharisÎncă nu există evaluări
- How To Review A Book in Up To 5,000 Words: First StepsDocument3 paginiHow To Review A Book in Up To 5,000 Words: First StepsAnnaÎncă nu există evaluări
- PowerFlex 4M LabDocument22 paginiPowerFlex 4M Labmaria laura delgado morenoÎncă nu există evaluări
- Functional Molecular Engineering Hierarchical Pore-Interface Based On TD-Kinetic Synergy Strategy For Efficient CO2 Capture and SeparationDocument10 paginiFunctional Molecular Engineering Hierarchical Pore-Interface Based On TD-Kinetic Synergy Strategy For Efficient CO2 Capture and SeparationAnanthakishnanÎncă nu există evaluări