S-ar putea să vă placă și
- Balancing MachineDocument18 paginiBalancing MachineMuhummad ZeeshanÎncă nu există evaluări
- Balancing MachineDocument3 paginiBalancing MachineEzuddin YazidÎncă nu există evaluări
- Dynamics Lab Manual - ME6511Document66 paginiDynamics Lab Manual - ME6511vinothÎncă nu există evaluări
- Active Suspension System With Preview ControlDocument5 paginiActive Suspension System With Preview Controlrudey18Încă nu există evaluări
- Thermodynamics: Strain Gauge ExperimentDocument6 paginiThermodynamics: Strain Gauge ExperimentJeromeClintonÎncă nu există evaluări
- Formulas For Gear Calculation - Internal GearsDocument7 paginiFormulas For Gear Calculation - Internal Gearssuna06m6403Încă nu există evaluări
- KOM ProjectDocument15 paginiKOM ProjectArvene Binmer JesaryÎncă nu există evaluări
- Lecture06 - Multicylinder EnginesDocument55 paginiLecture06 - Multicylinder Engines蒲俊雄Încă nu există evaluări
- Ductile IronDocument8 paginiDuctile IronDhan CÎncă nu există evaluări
- Vibration: Core Body of Knowledge For The Generalist OHS ProfessionalDocument25 paginiVibration: Core Body of Knowledge For The Generalist OHS ProfessionalAlbert PerezÎncă nu există evaluări
- Design and Analysis of Single Plate ClutchDocument3 paginiDesign and Analysis of Single Plate ClutchChandra Sekar100% (1)
- Crank and Slotted Lever Quick Return (Rev2)Document9 paginiCrank and Slotted Lever Quick Return (Rev2)Vipin YadavÎncă nu există evaluări
- Machine VibrationDocument18 paginiMachine VibrationBatha KhanÎncă nu există evaluări
- Design and Analysis of An Epicyclic Gearbox For An Electric DrivetrainDocument9 paginiDesign and Analysis of An Epicyclic Gearbox For An Electric DrivetrainNajrul IslamÎncă nu există evaluări
- Balancing of Reciprocating MassesDocument74 paginiBalancing of Reciprocating MassesBharaniSai100% (1)
- Dom Unit II Imp QuestionsDocument2 paginiDom Unit II Imp QuestionsSree MurthyÎncă nu există evaluări
- Structural Analysis of Three Stage Coupled Planetary Gear Train and Determination of EfficiencyDocument3 paginiStructural Analysis of Three Stage Coupled Planetary Gear Train and Determination of EfficiencyInnovative Research PublicationsÎncă nu există evaluări
- PATENT - Axial Flux Motor AssemblyDocument13 paginiPATENT - Axial Flux Motor Assemblyrakeshee2007Încă nu există evaluări
- Practical Approach To Precision BalancingDocument4 paginiPractical Approach To Precision BalancingAbolfazl KhakiÎncă nu există evaluări
- Gearboxes ClassDocument35 paginiGearboxes ClassNaveen Vachipalli100% (1)
- Stepper Motors: Stepper Motor vs. Servo MotorDocument13 paginiStepper Motors: Stepper Motor vs. Servo MotorGurwinder Singh100% (1)
- Twin-Tube Hydraulic Shock AbsorberDocument12 paginiTwin-Tube Hydraulic Shock AbsorberthangavijayÎncă nu există evaluări
- MEC322 Chapter 7 - TORQUE & POWER MEASUREMENTDocument19 paginiMEC322 Chapter 7 - TORQUE & POWER MEASUREMENTAiman ArhamÎncă nu există evaluări
- Static BalancingDocument4 paginiStatic Balancingfarhan125Încă nu există evaluări
- Screw JackDocument10 paginiScrew JackNarasimhaPrasadÎncă nu există evaluări
- Design II MDE 221 Mott CH 8 and CH 9 Spur GearsDocument42 paginiDesign II MDE 221 Mott CH 8 and CH 9 Spur GearsThieroy PelendaÎncă nu există evaluări
- Cam MechDocument24 paginiCam MechmarcglebÎncă nu există evaluări
- Mechanics of Machinery 2 - Balancing of Rotating MassesDocument11 paginiMechanics of Machinery 2 - Balancing of Rotating MassesAhmed Zawad ShovonÎncă nu există evaluări
- Machine Element II: Institute of TechnologyDocument39 paginiMachine Element II: Institute of TechnologyAbiy Aliye100% (1)
- Automobile Engineering Laboratory (UME502) Technical Report On Starting/Cranking SystemsDocument3 paginiAutomobile Engineering Laboratory (UME502) Technical Report On Starting/Cranking SystemsMudit JainÎncă nu există evaluări
- YCKT-Balancing Machine CEMBDocument7 paginiYCKT-Balancing Machine CEMBNguyễn Quốc PhượngÎncă nu există evaluări
- ClutchesDocument17 paginiClutchesRanjit RajendranÎncă nu există evaluări
- 08 CH-6, Fluid Motion Within Combustion ChamberDocument24 pagini08 CH-6, Fluid Motion Within Combustion ChamberAhsan AliÎncă nu există evaluări
- Rack and Pinion Gear DesignDocument32 paginiRack and Pinion Gear DesignSrini KumarÎncă nu există evaluări
- KDM 6Document54 paginiKDM 6KarthikeyanRamanujamÎncă nu există evaluări
- Motor Tarque CalculationsDocument5 paginiMotor Tarque CalculationsmuhdqasimÎncă nu există evaluări
- Alignment Test DrillingDocument4 paginiAlignment Test DrillingVivek Fegade33% (3)
- Series Hybrid Car Doc - 3Document137 paginiSeries Hybrid Car Doc - 3mekkararameshÎncă nu există evaluări
- Upto 2010 KomDocument36 paginiUpto 2010 KomRajueswarÎncă nu există evaluări
- Principle of Epicyclic GearingDocument11 paginiPrinciple of Epicyclic GearingAnuj AwasthiÎncă nu există evaluări
- ClutchesDocument12 paginiClutchesAbebaw AyeleÎncă nu există evaluări
- Vibration AnalysisDocument25 paginiVibration AnalysisHarshal Avinash MungikarÎncă nu există evaluări
- 4.12 Tractor StabilityDocument4 pagini4.12 Tractor Stabilityniloy_67Încă nu există evaluări
- Balancing of Rotating El McsDocument59 paginiBalancing of Rotating El McsDeep SYÎncă nu există evaluări
- Crankshaft Torsional Vibration ReferenceDocument3 paginiCrankshaft Torsional Vibration ReferenceSakthiVel RamuÎncă nu există evaluări
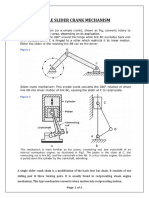
- Single Slider Crank MechanismDocument2 paginiSingle Slider Crank MechanismDeepika Machina0% (1)
- Design and Development of Machine Fault Simulator (MFS) For Fault DiagnosisDocument8 paginiDesign and Development of Machine Fault Simulator (MFS) For Fault DiagnosisAnonymous pKuPK3zUÎncă nu există evaluări
- DOM Full Notes PDFDocument263 paginiDOM Full Notes PDFCHAMAN R100% (1)
- Final ReportDocument45 paginiFinal ReportKuppu Raj100% (1)
- Thermohydrodynamic Analysis of A Journal BearingDocument33 paginiThermohydrodynamic Analysis of A Journal BearingAmalendu BiswasÎncă nu există evaluări
- Design of Clutch Plate For Light Motor Vehicle NewDocument14 paginiDesign of Clutch Plate For Light Motor Vehicle NewKedar BardeÎncă nu există evaluări
- Shaft LayoutDocument21 paginiShaft LayoutAmmar SafwtÎncă nu există evaluări
- Module IV: Gears and Gear TrainsDocument38 paginiModule IV: Gears and Gear TrainsSuraj VinayÎncă nu există evaluări
- Fluid Coupling Torque Converter PDFDocument22 paginiFluid Coupling Torque Converter PDFMahmud Saikat100% (1)
- Balancing MachineDocument4 paginiBalancing MachineChoochart ThongnarkÎncă nu există evaluări
- Balancing Drive SystemsDocument13 paginiBalancing Drive Systemsismail çakmakÎncă nu există evaluări
- Magnetic BearingDocument19 paginiMagnetic BearingMamesh MathankarÎncă nu există evaluări
- Term Paper On Explain About The Balancing of MachinesDocument16 paginiTerm Paper On Explain About The Balancing of MachinesAshish VaniyaÎncă nu există evaluări
- Field Balancing Large Rotating MachineryDocument26 paginiField Balancing Large Rotating MachineryShantanu SamajdarÎncă nu există evaluări
- Last Date of Receipt of Application Is 16/05/2016Document4 paginiLast Date of Receipt of Application Is 16/05/2016Sibasish SahuÎncă nu există evaluări
- GATE 2014: To Chairperson GATE Kharagpur 721302Document2 paginiGATE 2014: To Chairperson GATE Kharagpur 721302Sibasish SahuÎncă nu există evaluări
- Application Details - RRB RECRUITMENTDocument2 paginiApplication Details - RRB RECRUITMENTSibasish SahuÎncă nu există evaluări
- E-Receipt For State Bank Collect PaymentDocument1 paginăE-Receipt For State Bank Collect PaymentSibasish SahuÎncă nu există evaluări
- A181H87Challan PDFDocument1 paginăA181H87Challan PDFSibasish SahuÎncă nu există evaluări
- A181H87Challan PDFDocument1 paginăA181H87Challan PDFSibasish SahuÎncă nu există evaluări
- Welcome To Made EasyDocument18 paginiWelcome To Made EasySibasish SahuÎncă nu există evaluări
- Je SarojDocument2 paginiJe SarojSibasish SahuÎncă nu există evaluări
- All Accounts Balance DetailsDocument1 paginăAll Accounts Balance DetailsSibasish SahuÎncă nu există evaluări
- Cost Estimation: CIS 375 Bruce R. Maxim UM-DearbornDocument31 paginiCost Estimation: CIS 375 Bruce R. Maxim UM-DearbornSibasish SahuÎncă nu există evaluări
- Online Test Dashboard: Test Id: Test18 Home (Userhome - PHP) View Results (Viewresults - PHP? Test - Id Test18)Document9 paginiOnline Test Dashboard: Test Id: Test18 Home (Userhome - PHP) View Results (Viewresults - PHP? Test - Id Test18)Sibasish SahuÎncă nu există evaluări
- Online Test Dashboard: Test Id: Test16 Home (Userhome - PHP) View Results (Viewresults - PHP? Test - Id Test16)Document12 paginiOnline Test Dashboard: Test Id: Test16 Home (Userhome - PHP) View Results (Viewresults - PHP? Test - Id Test16)Sibasish SahuÎncă nu există evaluări
- Nachiketa Biswal Personal Use Product Key: 092711NA3CE602831F86 License Valid Till: 12 November 2014 Installation Number: 1025-2355-1548Document1 paginăNachiketa Biswal Personal Use Product Key: 092711NA3CE602831F86 License Valid Till: 12 November 2014 Installation Number: 1025-2355-1548Sibasish SahuÎncă nu există evaluări
- Online Test Dashboard: Test Id: Test14 Home (Userhome - PHP) View Results (Viewresults - PHP? Test - Id Test14)Document10 paginiOnline Test Dashboard: Test Id: Test14 Home (Userhome - PHP) View Results (Viewresults - PHP? Test - Id Test14)Sibasish SahuÎncă nu există evaluări
- OT Schedule Test No Start Date End Date Type of Test Result AnnouncementDocument1 paginăOT Schedule Test No Start Date End Date Type of Test Result AnnouncementSibasish SahuÎncă nu există evaluări
- Online Test Dashboard: Test Id: Test15 Home (Userhome - PHP) View Results (Viewresults - PHP? Test - Id Test15)Document12 paginiOnline Test Dashboard: Test Id: Test15 Home (Userhome - PHP) View Results (Viewresults - PHP? Test - Id Test15)Sibasish SahuÎncă nu există evaluări
- Sachin Kumar Mishra 29/10/1990 100: E-Receipt For State Bank Collect PaymentDocument1 paginăSachin Kumar Mishra 29/10/1990 100: E-Receipt For State Bank Collect PaymentSibasish SahuÎncă nu există evaluări
- Abs EdgeDocument39 paginiAbs Edgecorporacion corprosinfro100% (3)
- Service Notes: Issued by RJADocument25 paginiService Notes: Issued by RJAshekinah oficialÎncă nu există evaluări
- Ieee Standard 1016Document3 paginiIeee Standard 1016Juan Carlos Cabrera GudiñoÎncă nu există evaluări
- DQ Blisteadora PDFDocument15 paginiDQ Blisteadora PDFsami2210Încă nu există evaluări
- HJKHJHDocument15 paginiHJKHJHibrargaddar123Încă nu există evaluări
- 1.4 Power Quality ProblemsDocument2 pagini1.4 Power Quality ProblemssimaarulÎncă nu există evaluări
- 9098i Circuit Diagrams Overlays Issue 2Document321 pagini9098i Circuit Diagrams Overlays Issue 2Robert Morris100% (1)
- 1 IEEE 4 Node Test Feeder 01-01-2014: Load Flow AnalysisDocument12 pagini1 IEEE 4 Node Test Feeder 01-01-2014: Load Flow AnalysisSatrio WibowoÎncă nu există evaluări
- Reference Manual: ModelDocument162 paginiReference Manual: ModelrassesÎncă nu există evaluări
- Eee-Vi-Switchgear & Protection (10ee62) - Notes PDFDocument92 paginiEee-Vi-Switchgear & Protection (10ee62) - Notes PDFRK KÎncă nu există evaluări
- TC-P50C2: 50 Inch Class 720p Plasma HDTVDocument95 paginiTC-P50C2: 50 Inch Class 720p Plasma HDTVRonald CastellarÎncă nu există evaluări
- Boylestad IRM TIFDocument163 paginiBoylestad IRM TIFEngr. Ronell B. SolijonÎncă nu există evaluări
- VS Phontech Maritime Catalog 2020Document96 paginiVS Phontech Maritime Catalog 2020Ehsan RohaniÎncă nu există evaluări
- Memory Interfaces Made Easy With Xilinx Fpgas and The Memory Interface GeneratorDocument16 paginiMemory Interfaces Made Easy With Xilinx Fpgas and The Memory Interface GeneratorRamya NedumbalaÎncă nu există evaluări
- 55:041 Electronic Circuits: Sections of Chapter 3 &4Document97 pagini55:041 Electronic Circuits: Sections of Chapter 3 &4Daniel GarzonÎncă nu există evaluări
- Practical Guide To InstrumentationDocument12 paginiPractical Guide To InstrumentationradiobrunoÎncă nu există evaluări
- Tutorial StellaDocument19 paginiTutorial StellaCaioGomesÎncă nu există evaluări
- DVI and VGA ExplainedDocument2 paginiDVI and VGA ExplainedVKSURYAÎncă nu există evaluări
- Abb MCCDocument76 paginiAbb MCCfridjatÎncă nu există evaluări
- DSE 4510 Dse4520 Operator ManualDocument64 paginiDSE 4510 Dse4520 Operator ManualPedro100% (5)
- Fuses1 11Document19 paginiFuses1 11Joshi DhvanitÎncă nu există evaluări
- Radiation Damage in Sentaurus TCADDocument25 paginiRadiation Damage in Sentaurus TCADqiwinzhengÎncă nu există evaluări
- Less or Nonflammable Liquid Insulated TransformersDocument21 paginiLess or Nonflammable Liquid Insulated TransformersTosikur RahmanÎncă nu există evaluări
- Dell Inspiron 15 5575 Compal CAL51 LA F121P Rev 1 00A00 PDFDocument61 paginiDell Inspiron 15 5575 Compal CAL51 LA F121P Rev 1 00A00 PDFDeMzo SMpÎncă nu există evaluări
- Panasonic KX NCP500 1000 Installation Manual PDFDocument142 paginiPanasonic KX NCP500 1000 Installation Manual PDFLuisGermainSegoviaLlanquinÎncă nu există evaluări
- Isow7741 q1Document59 paginiIsow7741 q1gwegawÎncă nu există evaluări
- Work Instructions/Testing Reference Manual: Tata Power Delhi Distribution LimitedDocument32 paginiWork Instructions/Testing Reference Manual: Tata Power Delhi Distribution LimitedAnmol Srivastava100% (1)
- IIT Bombay, Dept of Mechanical Engineering ME 311: Autumn 2021 Mid-Semester ExaminationDocument3 paginiIIT Bombay, Dept of Mechanical Engineering ME 311: Autumn 2021 Mid-Semester Examinationarvind muraliÎncă nu există evaluări
- NetApp Data Ontap Simulator Cookbook 1.1Document17 paginiNetApp Data Ontap Simulator Cookbook 1.1Catán PatánÎncă nu există evaluări
- GDS-2000A User Manual 2013 1003Document261 paginiGDS-2000A User Manual 2013 1003Antonio Carlos ZimmermannÎncă nu există evaluări
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldDe la EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldEvaluare: 4.5 din 5 stele4.5/5 (55)
- Generative AI: The Insights You Need from Harvard Business ReviewDe la EverandGenerative AI: The Insights You Need from Harvard Business ReviewEvaluare: 4.5 din 5 stele4.5/5 (2)
- Cyber War: The Next Threat to National Security and What to Do About ItDe la EverandCyber War: The Next Threat to National Security and What to Do About ItEvaluare: 3.5 din 5 stele3.5/5 (66)
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityDe la EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityEvaluare: 5 din 5 stele5/5 (1)
- Algorithms to Live By: The Computer Science of Human DecisionsDe la EverandAlgorithms to Live By: The Computer Science of Human DecisionsEvaluare: 4.5 din 5 stele4.5/5 (722)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldDe la EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldEvaluare: 4.5 din 5 stele4.5/5 (107)
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyDe la EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyEvaluare: 3.5 din 5 stele3.5/5 (111)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyDe la EverandChip War: The Quest to Dominate the World's Most Critical TechnologyEvaluare: 4.5 din 5 stele4.5/5 (228)
- Solutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesDe la EverandSolutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesÎncă nu există evaluări
- Python for Beginners: A Crash Course Guide to Learn Python in 1 WeekDe la EverandPython for Beginners: A Crash Course Guide to Learn Python in 1 WeekEvaluare: 4.5 din 5 stele4.5/5 (7)
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziDe la Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziÎncă nu există evaluări
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessDe la EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessÎncă nu există evaluări
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveDe la EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveÎncă nu există evaluări
- Four Battlegrounds: Power in the Age of Artificial IntelligenceDe la EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceEvaluare: 5 din 5 stele5/5 (5)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindDe la EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindÎncă nu există evaluări
- Clean Code: A Handbook of Agile Software CraftsmanshipDe la EverandClean Code: A Handbook of Agile Software CraftsmanshipEvaluare: 5 din 5 stele5/5 (13)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceDe la EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceÎncă nu există evaluări
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.De la EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Evaluare: 5 din 5 stele5/5 (34)
- Dark Data: Why What You Don’t Know MattersDe la EverandDark Data: Why What You Don’t Know MattersEvaluare: 4.5 din 5 stele4.5/5 (3)
- Hacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesDe la EverandHacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesEvaluare: 5 din 5 stele5/5 (1)
- Excel 2023 for Beginners: A Complete Quick Reference Guide from Beginner to Advanced with Simple Tips and Tricks to Master All Essential Fundamentals, Formulas, Functions, Charts, Tools, & ShortcutsDe la EverandExcel 2023 for Beginners: A Complete Quick Reference Guide from Beginner to Advanced with Simple Tips and Tricks to Master All Essential Fundamentals, Formulas, Functions, Charts, Tools, & ShortcutsÎncă nu există evaluări
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewDe la EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewEvaluare: 4.5 din 5 stele4.5/5 (104)
- Working with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)De la EverandWorking with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)Evaluare: 5 din 5 stele5/5 (5)