IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE)
e-ISSN: 2278-1684,p-ISSN: 2320-334X, Volume 12, Issue 4 Ver. II (Jul. - Aug. 2015), PP 62-73
www.iosrjournals.org
Experimental Determination of Dynamic Characteristics of a
Vibration-Driven Robot
Ivan A. Loukanov1, Svetlin P. Stoyanov2
1
Department of Mechanical Engineering, University of Botswana, Botswana,
2
Department of Technical Mechanics, University of Ruse, Bulgaria
Abstract : This paper presents the experimental determination of dynamic characteristics of a vibration-driven
robot. The mechanical system consists of a shaker and a chassis. The latter is mounted on wheels furnished with
one-way bearings build into the wheels hubs. The robot is propelled by the resonance vibrations created by the
shakers rotating masses, which generate propulsive impulses transmitted to the chassis. The latter were
modified by the one-way bearings to unidirectional impulses thus creating a forward motion. By measuring and
analyzing the accelerations of free damped oscillations of the propulsion system, when the chassis is fixed, the
mechanical parameters such as spring constant, natural frequency and the damping factor were obtained.
Moreover the resonance vibrations created by the shaker and the forced oscillations imposed to the chassis
were recorded when the robot is moving unloaded. By employing the FFT tool box of the MATLAB software the
frequencies and the magnitudes of accelerations of the shaker, the chassis and their relative accelerations were
obtained. Lastly another series of tests were conducted when the robot is loaded by its towing force and
accelerations and the towing force were measured and analyzed by using the FFT analysis.
Keywords: Resonance vibrations, inertia propulsion, one-way bearing, spring system, linear damping.
I.
Introduction
For many decades the Nuclear and Chemical industry, the Military and the Navy experienced
shortages of robots which could be employed for observing, measuring, repair of pipes, air ducts and narrow
channels, caves, as well as for discovery and destroying land and underwater mines, unexploded shells etc. The
vibration-driven robots are cheap to manufacture, easy to control and propel through different environments,
because of the simplicity of their design and operation capabilities. They require less power and develop strong
traction as their propulsion is achieved by means of resonance vibrations of a specially designed one-degree-offreedom excitation system [1, 2]. On the other hand the new propulsion systems prevents the robot from getting
trapped in obstacles or on soft surfaces under the wheels [3] because the propulsion is created by means of
internally provided impulses applied to the chassis, thus no-torques are acted upon the wheels as in
conventional vehicles. Recently many academics are undertaking research in the field of mobile robots making
an effort to invent new methods of propulsion based on friction forces, rotating masses or rectilinear moving
masses inside of the robot [4], or designing and studying jumping robots by using the motion of two internally
moving masses [5, 6], or employing the difference between static and kinetic friction [7, 8, 9], etc.
This study is dedicated to an experimental determination of dynamic (mechanical) parameters of a
vibration-driven robot propelled by forced vibrations of a specially arranged propulsion system acting in the
direction of referred motion. The anticipated direction of motion is achieved by using one-way bearings
(clutches) mounted into the wheels hubs. They allow rotation of the wheels in one direction and prevent rotation
in the opposite one. The accomplished motion has a pulsing nature and utilizes only less than 50% of the input
energy to the oscillating system. By testing the robot and identifying the parameters of the system we expect
improving the performance of the propulsion system and maximizing its efficiency.
Therefore the objective of this study is to measure and analyze the free damped and force oscillations
of the shaker and the chassis of a prototype robot in order to determine the unknown mechanical and dynamic
parameters of the propulsion system such as natural damped frequencies, equivalent spring stiffness,
logarithmic decrement, coefficient of viscous resistance, damping coefficient, frequencies, accelerations etc.
II.
Materials and Method
The object of this study is the mobile wheeled robot illustrated in Fig. 1. It is intended for inspections
and observations of air ducts or any other restricted environments where human do not have a direct access.
Furthermore it may be used in a dangerous military, chemical or radiation sites, such as nuclear power stations,
chemical reactors etc. This is the same mobile robot vehicle investigated and primarily tested in the studies [1,
2]. A similar configuration of a mobile motor vehicle is proposed by Goncharevich [3] with some design
differences. However it has never been constructed or investigated so far. Apart of this the author is liable to
DOI: 10.9790/1684-12426273
www.iosrjournals.org
62 | Page
Experimental Determination of Dynamic Characteristics
declare that the idea for the propulsion system of the robot was solely his own and it was developed
independently before receiving a copy of the book [3] and reading the contents.
5
6
2
3
8
1
2
Direction of Motion
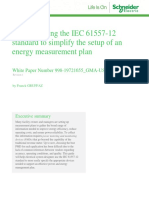
Fig. 1 shows a front view of the wheeled robot,
where: 1 - is the shaker; 2 - the chassis; 3 - oneway bearing installed in the hub of each wheel; 4
- spring system; 5 - rotating masses; 6 - DC
motor; 7 - timing belt-gear drive transmission
from the motor to the shaker; 8 - linear bearings.
Fig. 2 reveals the mounting locations of
the accelerometers: # 1 which is 1D accelerometer (amax =25g) fixed to the
outer frame (the chassis) and # 2 is 3D accelerometer (amax = 5g) mounted on
top of the shaker, where g=9.81 m/s2.
In reference to Fig. 1 the robot vehicle is propelled by a vibration excitation system, consisting of a
small laterally balanced mechanical shaker of total mass - m2, generating longitudinal inertial forces by means
of two offset synchronously rotating opposite to each other masses - m3. The excitation system (shaker) is
placed on two linear bearings and connected to the chassis of the robot having a mass - m1 by means of ten
equal and symmetrically placed tension springs of overall stiffness k (See Fig. 4). The spring system is set to
have an initial pre-tension such that its deflection is larger than the resonance amplitudes of the oscillating
system. The generated propulsion forces by the shaker are transmitted to the chassis through the springs and the
damping properties of the spring material.
For the purposes of determining the parameters of the system, the robot was equipped with two
accelerometers one fixed to the chassis and the other one to the shaker as illustrated in Fig. 2. The
accelerometers are intended for continuous measuring of the accelerations of the free damped and forced
vibrations in the direction of motion of the shaker and the chassis. They are of piezoelectric type and are
connected to a measuring and data-log electronic system of the Vernier Software & Technology - LabQuest 2.
Fig. 2 shows the locations of accelerometers and the methods of attachment (firmly fastened) to the respective
oscillating bodies as well as their capacities in terms of maximum accelerations, measured in numbers of the
gravitational acceleration, g=9.81 m/s2. Separately the measuring and data-log system used in this experimental
study is illustrated in Fig. 3, showing its major features, technical provisions and properties of the USB ports.
Some of technical data of the LabQuest 2 system are listed in Table 1 showing its specifications and limitations.
Fig. 3 displays the LabQuest 2 measuring and data log system and presents its features
DOI: 10.9790/1684-12426273
www.iosrjournals.org
63 | Page
Experimental Determination of Dynamic Characteristics
Table 1 Major technical specification of the portable LabQuest 2 data-log and measuring system
Processor
Communications
Interface
Data Recording
Memory
Ports
Accelerometers that
can be used
800 MHz
Wi-Fi 802.11 b/g/n; Bluetooth Smart for WDSS and Go Wireless Temp.
Resistive touch screen; Touch and stylus navigation for efficiency and precision.
Speed: 100,000 sps (samples per second); Resolution: 12-bit; Built-in GPS, 3-axis acc.
Imbedded: 200 MB; External: MicroSD, USB flash drive.
5 USB ports; flash & component ports; DC power jack; MicroSD/MMC; Audio In & Out
Power supply: 30 mA, 5 VDC; Scope: 49 m/s2 (25 g); Accuracy: 0.5 m/s2 (0.05 g); Frequency
range: 0100 Hz; Resolution: 0.037 m/s
III. Experimental study of the free damped oscillations of the robot propulsion system
To determine the dynamic parameters of the robot propulsion system (shaker), the chassis of the robot
was fixed to the ground. The corresponding mechanical model is shown in Fig. 4 with the three masses
involved, the equivalent spring stiffness k and the coefficient of viscous resistance b. At that point the spring
system of the shaker is subjected to initial deflection bigger than the maximum amplitude of the oscillating
system and released with zero initial velocity. At this time the excitation system begins free damped oscillations
with its natural frequency until they fully vanished. During the excitation of the shaker the signal measured by
the #2 accelerometer was continuously recorded until it disappeared. The experiments were repeated three times
and then the recorded signals were separately analyzed. The individual parameters of the propulsion system
were estimated by using the recorded signals such as amplitudes, periods, frequencies etc. and others were
calculated according to the well-known equations.
Fig. 4 presents the mechanical model used for measuring the free damped & forced oscillations of shaker; where
1 is the chassis (body1 of mass m1); 2 shaker (body 2 of mass m2), 3 - two synchronously rotating masses - m3.
3.1 Mechano-mathematical model used in the free damped oscillations of the robot propulsion system
In this case we are considering the robot propulsion system as one-degree-of-freedom. The choice of
the mathematical model is disputable, but we choose as a first approximation the linear model, where the spring
force is proportional to its deflection and the resisting force is proportional to the velocity of oscillations, as
presented in Fig. 5 below. When free oscillations are investigated the chassis is fixed and the rotating masses are
non-rotating but participating in the free oscillations of the shaker.
Fig. 5 presents the mathematical model of the excitation system, of bodies 2 and 3, where m=m 2+m3
The linear model is governed by the homogeneous ordinary differential equation of second order, written as:
(1)
mx2 cx2 kx2 0
where: m=m2+m3 is the oscillating mass of the excitation system (shaker), including the mass of the rotating
eccentric masses m3 and the spring system.
We also introduce the ratios:
(2)
x2 d 2 x2 dt 2 and x2 dx2 dt ,
b m 2n and k m 2
DOI: 10.9790/1684-12426273
www.iosrjournals.org
64 | Page
Experimental Determination of Dynamic Characteristics
which are the second and the first time derivatives of the displacement x2 with respect to time, b is the
coefficient of viscous resistance [N.s/m], k is the stiffness of the equivalent spring [N/m] and:
(3)
b m 2n and k m 2
In (3), n=b/2m=.f, [rad/s] is the damping coefficient of the oscillating system and [rad/s] is the
angular frequency of the damped oscillations. The magnitude of the oscillating mass of the shaker is m =
(m2+m3) = 1.31 kg, where m2=1.19 kg and m3=0.12 kg. Also the equation of logarithmic decrement is employed
in calculating the damping coefficient n as per the known equation:
= (1/3) ln [(ai /ai+3)]
(4)
3.2 Experimental investigation of the free damped oscillations of the robot propulsion system
Figs. 6 & 7 and Figs. 8 & 9 exemplify the recorded free damped oscillations of the excitation system
being the propulsion system of the robot. The system has total oscillating mass m=1.31 kg and is connected to
the chassis by means of 10 same size and same stiffness helical tension springs. All the experiments of free
damped oscillations were conducted at the same mechanical setup and the oscillations were generated by
shifting the system from equilibrium position to its maximum position and releasing it from rest. In this case the
eccentric masses m3 were stationary (not rotated) and oscillating together with the shaker (body2).
In this series of experiments, experiment #1 was unsuccessful because it was accompanied by a high frequency
ripple of unknown origin. So we will discuss and analyze the experiments #2, #3 and #4 only. Each of the
experiments was analyzed by using two reference points from the recorded signal. This approach allows getting
better accuracy when evaluating each record.
In the following figures the first reference points are shown in blue color and the second points in red
color. The corresponding values of the time and the accelerations are listed in Table 2. The time interval is used
to calculate the frequencies and the magnitudes of accelerations in order to calculate the logarithmic decrement . The value of the decrement is employed to calculate the damping coefficient of the oscillating system by
means of the frequencies of oscillations, also obtained from this experiment.
t3
t4
Experiment N3
Experiment N2
15
15
10
10
a3
Point 3
a4
Point 6
a7 0
a, m/s 2
a, m/s 2
a6
-5
Point 7
-5
-10
-10
-15
-15
-20
Point 4
-20
0.5
1.5
t, s
2.5
1.5
t, s
2.5
t7
t6
Fig. 6 gives details for the free damped
oscillations of experiment #2 where data
are taken from reference points 3 and 6
0.5
Fig. 7 exhibits free damped oscillations
recorded from experiment #3 where data
are taken from reference points 4 and 7
In Fig. 6 (exp. #2) and Fig. 8 (exp. #4) the reference points 3 and 6 were used for determining the
system parameters as shown. The respective time instances t3 and t6 and the associated accelerations a3 and a6
are illustrated in the graphs. Fig. 7 (exp. #3) indicates the related reference points 4 and 7, the time instances t4
and t7, as well as the corresponding accelerations of the free damped oscillations a4 and a6.
By using the magnitudes of the accelerations at a particular time instant corresponding to the respective
reference points shown in the above figures the system parameters were determined and listed in Table 2. The
measured and processed data are finally averaged for the three experiments of the oscillating system.
DOI: 10.9790/1684-12426273
www.iosrjournals.org
65 | Page
Experimental Determination of Dynamic Characteristics
t4
t3
Experiment N4
Experiment N4
20
20
15
15
Point 3
10
a4
Point 4
5
Point 6
a7
a, m/s 2
a6
a, m/s 2
a3
10
0
-5
-5
-10
-10
-15
-15
-20
0.5
1.5
t, s
2.5
-20
Point 7
0.5
t6
1.5
t, s
2.5
t7
Fig. 9 shows details of the free damped
oscillations of experiment #4 where data
are taken from reference points 4 and 7
Fig. 8 shows details of the free damped
oscillations of experiment #4 where data
are taken from reference points 3 and 6
It should be mentioned ones again that the parameters obtained from experiment #2 are based upon
reference points 3 & 6 and that of experiment #3 upon reference points 4 & 7. Also the parameters found from
experiment #4 were evaluated twice by using the data drawn from reference points 3 & 6 and after that from
points 4 & 7 as shown in Fig. 8 and Fig. 9 respectively. The reason for this approach is to account for the fact
that the results may vary when different reference points are employed within the same record. This method
allows getting better accuracy and eliminates the variation of the period due to some non-linear effects not
accounted for by the linear model shown in Fig. 5. The same approach could be used for experiments #2 and #3,
but due to constrained space in the paper it is done for experiment # 4 only.
Table 2 Test results from experiments # 2, #3 and #4 for m = 1.31 kg (free damped oscillations)
Parameters of the oscillating system
Initial reference point, #3
Final reference point, #6
Initial reference point #4
Final reference point, #7
Period of free undamped oscillations,
Period of free undamped oscillations,
Frequency of the free damped oscillations
Frequency of the free damped oscillations
Acceleration corresponding to point #3
Acceleration corresponding to point #6
Acceleration corresponding to point #4
Acceleration corresponding to point #7
Circular frequency of the damped system
Logarithmic decrement, Exp. #2 and #4
and Exp. #3 & #4
Coefficient of damping
Coefficient of viscous resistance
Circular frequency of the damped system
Natural frequency of the damped system
Coefficient of equivalent stiffness
DOI: 10.9790/1684-12426273
Equations
and units
t3
[s]
t6
[s]
t4
[s]
t7
[s]
T = (t6-t3)/3
[s]
T = (t7-t4)/3
[s]
f = [1/(t6-t3)]/3 [Hz]
f=[1/(t7-t4)]/3 [Hz]
a3
[m/s2]
a6
[m/s2]
a4
[m/s2]
a7
[m/s2]
p=2f
[s-1]
= (1/3).ln (a3/a6)
= (1/3).ln (a4/a7)
n=.f
[s-1]
b=2mn
[Ns/m]
=(n2- p2)[s-1]
f = /(2),
[Hz]
k = m2.2,
[N/m]
Exp. #2
(p. 3-6)
0.969
1.441
/
/
0.157
/
6.356
/
8.307
2.028
/
/
39.936
0.470
/
2.988
7.679
39.824
6.338
2037.9
www.iosrjournals.org
Exp. #3
(p. 4-7)
/
/
1.445
1.911
/
0.155
/
6.438
/
/
6.447
1.326
40.450
/
0.527
3.391
8.715
40.307
6.415
2087.7
Values of parameters
Exp. #4 Exp. #4
(p. 3-6)
(p. 4-7)
1.593
/
2.061
/
/
1.750
/
2.210
0.156
/
/
0.153
6. 410
/
/
6.522
9.815
/
3.325
/
/
6.939
/
1.432
40.277
40.977
0.361
/
/
0.526
2.313
3.430
5.944
8.815
40.210
40.833
6.400
6.499
2077.7
2142.6
Avg.
/
/
/
/
0.155
6.432
/
/
/
/
40.41
0.471
3.031
7.788
40.29
6.413
2086
66 | Page
Experimental Determination of Dynamic Characteristics
5
1
4
2
Fig. 10 illustrates the equipment used in the forced vibration test, where: 1 is the shaker (body 2); 2
- LabQuest 2 unit, 3 the power supply unit, 4 - motor speed controller: 5 - accelerometer # 2
3.3 Experimental investigation of forced vibrations of shaker when the chassis is fixed.
New series of experiments were conducted with the robot propulsion system shown in Fig. 4 where the
chassis, body1, is fixed to the ground and body2 (shaker) subjected to forced oscillations generated by the
rotating eccentric masses m3. This is achieved by controlling the speed of the DC motor by means of a speed
controller such that the single-degree-of-freedom oscillating system approaches the resonance along the
ascending branch of the resonance graph. As a result the amplitudes of displacement, velocities and
accelerations of body2 (shaker) attained maximum values. During this time the signal generated by the
accelerometer #2 was continuously recorded for four seconds and saved by the LabQuest 2 data log system.
After that it was analyzed with the Fast Furies Transform (FFT) tool box of the MATLAB software.
Fig. 10 shows the experimental setup used for the forced oscillations done with the robot propulsion
system. The differential equation governing the forced vibrations of the oscillating system is:
mx2 cx2 kx2 m3 2 sin( t )
(5)
where: m=m2+m3, is the shaker oscillating (propulsion) mass and is the offset from the axis of rotation of the
unbalanced rotating masses, having total mass m3 = 0.12 kg.
Two experiments were conducted with the chassis (body1) being fixed to the ground while the propulsion
system (shaker) is running in close to resonance condition. It is always difficult to set the supplied voltage to the
motor of the same magnitude. For this reason most of the repeated experiments experience slightly different
magnitudes of accelerations and amplitudes of resonance oscillations.
Experiment N1
Experiment N1
20
12
15
10
10
A m/s 2
a, m/s 2
5
0
-5
4
-10
2
-15
-20
0.2
0.4
0.6
0.8
1
t, s
1.2
1.4
1.6
1.8
Fig. 11 illustrates the relative resonance
oscillations of body2 with respect to the
fixed body1 during Exp. # 1
10
15
20
25
f, Hz
30
35
40
45
50
Fig. 12 exemplifies the spectrogram of the
relative resonance oscillations of body2 with
respect to the fixed body1
Figs. 11 and 13 present the recorded force oscillations while Figs. 12 and 14 demonstrate the corresponding
spectrograms obtained from the FFT analysis for experiments #1 and #2 respectively. From the spectrogram in
Fig. 12 shows the frequency of relative oscillations and the amplitude of the acceleration of body2 with respect
to the fixed body1 are found to be frel = 12.82 Hz and arel = 11.53 m/s2.
DOI: 10.9790/1684-12426273
www.iosrjournals.org
67 | Page
Experimental Determination of Dynamic Characteristics
Experiment N2
Experiment N2
12
20
15
10
10
8
A, m/s 2
a, m/s 2
5
0
-5
-10
2
-15
-20
0
0
0.2
0.4
0.6
0.8
1
t, s
1.2
1.4
1.6
1.8
Fig. 13 illustrates the relative resonance
oscillations of body 2 with respect to the
fixed body 1 during Exp. # 2
10
15
20
25
f, Hz
30
35
40
45
50
Fig. 14 shows the spectrogram of the
relative oscillations of body2 with
respect to fixed body1 during Exp. # 2
Likewise from the spectrogram in Fig. 14 similar to that in Fig. 12 the frequency of forced oscillations
and the amplitude of the accelerations of body2 relative to the fixed body1 are found to be frel = 12.82 Hz and
arel = 10.51 m/s2 respectively. The difference in the accelerations is owing to the different voltage set up
supplied to the motor, hence small differences result in the generated accelerations for the same resonance
frequency of the shaker. Obviously the frequencies are not affected by the voltage deviation supplied to the DC
motor, only the amplitudes of accelerations are sensitive to that. The reason is that at different locations on the
ascending portion of the resonance graph, the magnification changes significantly, hence the accelerations vary.
Table 3 Experimental data of forced oscillations of body 2 regarding the fixed body 1
Number of
experiment
Exp. # 1
Exp. # 2
IV.
Frequency,
f1=f2, [Hz]
Circular freq.
2, [rad/s]
12.82
80.53
Acceleration,
a2=A, [m/s2]
11.53
11.02
10.51
Experimental investigation of forced vibrations of unloaded robot in motion.
Experiment N1
Experiment N1
50
16
40
14
30
12
20
10
A1, m/s 2
a, m/s 2
Average acceleration,
A2avg =A=(a2,#1+a2,#2)/2, [m/s2]
10
0
8
6
-10
-20
-30
-40
0.2
0.4
0.6
0.8
1
t, s
1.2
1.4
1.6
1.8
Fig. 15 illustrates the recorded signals of
forced oscillations of body1 (blue),
body2 (green) and the relative acc. (red)
between body1 and body2, from exp. #1
DOI: 10.9790/1684-12426273
10
15
20
25
f, Hz
30
35
40
45
50
Fig. 16 presents the frequency
spectrogram of body1 (chassis) obtained
from exp. #1 when the unloaded robot is
in motion, f1 = 8.24 Hz & a1=A1 = 15.07
m/s2
www.iosrjournals.org
68 | Page
Experimental Determination of Dynamic Characteristics
Experiment N1
Experiment N1
35
18
16
30
14
25
A Relative, m/s2
A2, m/s 2
12
10
8
20
15
10
4
2
0
10
15
20
25
f, Hz
30
35
40
45
50
10
15
20
25
f, Hz
30
35
40
45
50
Fig. 18 shows the spectrogram of the
Fig. 17 displays the frequency
relative motion of body2 relative to body1
spectrogram of body2 (shaker) obtained
from Exp. #1 of the unloaded moving
from Exp. #1 when the unloaded robot is
robot, f =8.24 Hz, a=A= 31.02 m/s2
in motion, f2 = 8.24 Hz and a2=A2 = 16.16
m/s2
Two experiments were conducted with the unloaded robot in motion. The objective is to analyze the
interactions between the forced oscillations of body2 and that of body1 as well as their relative interactions. Fig.
15 shows the recorded oscillations from experiment #1 of body1 (blue), body2 (green) and the relative
oscillations between bodies 1 and 2 shown in red color. Obviously the accelerations are poly-harmonic because
of interactions between the bodies involved in the oscillating system. In this case the signals produced by the
accelerometers attached to body1 (blue) and body2 (green) was recorded along with the generated relative
oscillations (red). Next, these signals were analyzed with the FFT tool box of MATLAB software to produce the
above spectrograms. These are shown separately in Figs. 16, 17 and Fig. 18.
It is remarkable that all bodies in the system oscillate with the same resonance frequency f1 = f2 = f = 8.
24 Hz but instead the amplitudes of their accelerations are dissimilar due to the difference in the power supply to
the motor in each test. The relative amplitude of the acceleration appears to be approximately the sum of the
accelerations of body1, a1 and body2, a2, i.e. AA1 + A2 or a a1 + a2 =15.07+16.16=31.23 m/s231.02 m/s2, or
having only 0.61% difference. The difference in amplitudes is negligibly small and therefore it is neglected. So
the determined amplitudes and frequencies are of good accuracy and may be used in the forthcoming theoretical
studies of the same system and will give us an insight about the theoretically predicted dynamic parameters.
Experiment N2
Experiment N2
50
18
40
16
30
14
20
12
A1, m/s 2
a, m/s 2
10
0
-10
10
8
-20
-30
-40
-50
0.2
0.4
0.6
0.8
1
t, s
1.2
1.4
1.6
1.8
Fig. 19 illustrates the recorded signals of
forced oscillations of body 1 (blue), body 2
(green) and the signal of relative (red)
acceleration between them from Exp. #2
DOI: 10.9790/1684-12426273
10
15
20
25
f, Hz
30
35
40
45
50
Fig. 20 shows the frequency spectrogram
of body1 (chassis) taken from Exp. #2
when the unloaded robot was in motion, f1
= 8.54 Hz and a1=A1 = 16.51 m/s2
www.iosrjournals.org
69 | Page
Experimental Determination of Dynamic Characteristics
Experiment N2
Experiment N2
20
40
18
35
16
30
A Relative, m/s2
14
A2, m/s 2
12
10
8
25
20
15
10
4
2
0
10
15
20
25
f, Hz
30
35
40
45
50
Fig. 21 denotes the frequency
spectrogram of body2 (green) from
Exp. #2 when the robot is in motion,
so the frequency f2 = 8.54 Hz &
acceleration a2=A2 = 18.86 m/s2
10
15
20
25
f, Hz
30
35
40
45
50
Fig. 22 presents the spectrogram of
the relative acceleration of body2
about body1 taken from Exp. #2
while the robot is moving, then f =
8.54 Hz, and A = 35.14 m/s2
From experiment #2, the recorded accelerations of body 1 and body 2 and the relative accelerations are
presented in Fig. 19. The same colors codes were used in identifying the accelerations of the bodies as in Fig. 15
above. By analyzing the results of exp. #2 it was detected that the three accelerations have the same frequency f
= 8.54 Hz and the value of the relative acceleration is approximately the sum of the accelerations of the
respective bodies: namely A A1 + A2, or a a1 + a2 = 16.51 +18.86= 35.38 m/s2 35.14 m/s2 as seen in the
spectrogram of Fig. 22. The differences in test 1 and test 2 are 0.61% and 0.68% respectively, so these are too
small and may be neglected. The experimental data obtained from experiments #1 and #2 are listed in Table 4.
Table 4 Experimental results from forced oscillations of the moving unloaded robot body1 and body2
Number of Experiment
#
Exp. # 1
Exp. # 2
Avg. of #1 and #2
Common frequency
f1 = f2 = f
[Hz]
8.24
8.54
8.39
Acceleration
of body 1
a1, [m/s2]
15.07
16.51
15.79
Acceleration
of body 2
a2, [m/s2]
16.16
18.86
17.51
Relative acceleration between
body 1 and body 2
arel=A, [m/s2]
31.02
35.14
33.08
The difference in the accelerations in these experiments is because of the different voltage supply to the motor
for each setup leading to different values of the accelerations. As mentioned in section 3.3, it is difficult to set
the system to the same resonance, so small variations in the values of accelerations and frequencies are likely.
V.
Experimental investigation of forced vibrations of the loaded robot in motion.
Five experiments were conducted as per the set up shown in Fig. 23. In all of them a load sell of 10 N
is used to measure the towing force of the robot along with the accelerometers #1 and #2 measuring the
accelerations of body1 and body2 respectively. The load sell is connected to body1 by means of a rubber string
intended to damp (minimize) the fluctuations in the recorded force, although not fully succeeded.
6
25
20
15
5
a1, m/s2
10
2
3
1
5
0
-5
-10
Fig. 23 illustrates the experimental set up where: 1
is body1; 2 body2; 3 accelerometers #1; 4
accelerometer #2; 5 load sell; 6 new power
supply & speed controller; 7 LabQuest 2 unit.
DOI: 10.9790/1684-12426273
-15
0.5
1.5
2.5
3.5
t, s
Fig. 24 shows the pattern of acceleration of body1
www.iosrjournals.org
70 | Page
Experimental Determination of Dynamic Characteristics
25
14
20
12
15
10
10
5
a2, m/s2
a1, m/s2
0
-5
-10
-15
2
-20
0
0
10
20
30
40
50
60
70
80
-25
90
0.5
1.5
f, Hz
2.5
3.5
t, s
Fig. 25 displays the spectrogram of
accelerations
of body1 subjected to forced oscillations
Fig. 26 shows the pattern of acceleration of body2
15
5.8
5.7
5.6
10
F, N
a2, m/s2
5.5
5.4
5.3
5
5.2
5.1
10
20
30
40
50
60
70
80
90
0.5
1.5
2.5
3.5
t, s
f, Hz
Fig. 27 identifies the main frequency of the
acceleration of body2 with the rest being negligible
Fig. 28 illustrates the variation of the towing
force F during test #1 for duration of 4 seconds
Spectrum of the detrended F
0.2
0.14
Amplitude of the detrended F, N
0.15
Detrended F, N
0.1
0.05
0
-0.05
-0.1
-0.15
-0.2
-0.25
0.5
1.5
2.5
3.5
0.12
0.1
0.08
0.06
0.04
0.02
10
15
20
25
30
35
40
45
50
f, Hz
t, s
Fig. 29 shows the towing force F after being
modified (detrended) by the FFT analysis.
Fig. 30 specifies the main amplitude of towing
force F with the rest of amplitudes being minor.
The experiments are done on a PV dry and horizontal surface under ambient temperature of 25 0C.
Owing to the limited space in the paper only the graphs of experiment # 1 are shown. The rest of the tests results
are listed in Table 5, where the values of the accelerations, frequencies and mean towing force are shown. For
comparison purposes in addition to these data the last row in Table 5 repeats the average data taken from Table
4 for the unloaded robots accelerations and frequencies of body1 and body2 respectively.
Table 5 Experimental data obtained from the loaded robot with its towing force and of unloaded robot
DOI: 10.9790/1684-12426273
www.iosrjournals.org
71 | Page
Experimental Determination of Dynamic Characteristics
No.
of exp.
No. 1
No. 2
No. 3
No. 4
No. 5
Avg. #(1 to 5)
Avg. #(1 to 2)
Accelerations
of Body1,
m/s2
a1,1=12.5
a1,2=2.45
a1,3=0.93
Accelerations
of Body2,
m/s2
a2=14.8
0
0
Frequencies
of Body1
Hz
f1,1=10.7
f1,2=21.5
f1,3=32.0
Frequencies
of Body2
Hz
f2=10.7
0
0
a1,1=11.7
a1,2 = 2.12
a1,3 = 1.12
a1,1= 8.49
a1,2 = 2.72
a1,3 = 0.64
a1,1=11.6
a1,2= 2.39
a1,3= 1.07
a1,1=13.0
a1,2 = 2.05
a1,3 = 0.96
a1,1,avg=11.5
15.8
a2=15.3
0
0
8.19
0
0
10.4
0
0
12.3
0
0
12.2
17.5
f1,1=11.0
f1,2=21.7
f1,3=32.7
f1,1=10.3
f1,2=20.8
f1,3=31.0
f1,1=10.3
f1,2=20.5
f1,3=31.0
f1,1= 9.76
f1,2=19.3
f1,3=29.1
f1,1,avg=10.4
8.4
f2=11.0
0
0
10.3
0
0
10.3
0
0
9.76
0
0
f2,avg=10.4
8.4
VI.
Mean value of
towing force, F
N
5.38
Frequency
of detrended
force, Hz
f1,1= 10.7
f1,2 = 5.53
f1,3 = 0.49
f1,1 =11.0
f1,2 = 0.49
f1,3 = 21.7
f1,1=10.3
5.42
f1,2 = 0.49
f1,3 =20.8
f1,1=10.3
5.32
f1,2 = 0.49
f1,3= 20.8
f1,1 = 9.76
5.14
f1,2 = 0.24
f1,3 =19.5
Favg=5.25
f1,1,avg =10.4
Unloaded Robot
4.99
Discussion
In this paper an experimental investigation of a vibration-driven wheeled robot is conducted, studied
and analyzed. The objective was to determine the dynamic (mechanical) characteristics of the robot propulsion
system with the aim of employing these data in an upcoming study dedicated to the optimization of the robot
system. The optimization technique will be based upon a Multicriteria parametric optimization method by using
the determined parameters of the robot propulsion system in this study as a pilot data. The experimental results
obtained from the free damped oscillation of the robot propulsion system (body2) were listed in Table 2. On the
other hand the data of forced oscillations of body2 relative to the fixed body1 are recorded in Table 3. It was
found that both bodies oscillate with the same forced frequency during the experiments but the magnitudes of
their accelerations differ because of the slight difference in the voltage set up to the motor during each
experiment. The latter forces the motor to operate with different speeds of rotation and hence dissimilar values
of the individual accelerations are registered.
Furthermore the robot mechanical system was investigated during forced resonance oscillations of the
propulsion system while the robot was moving with no towing force applied to it. The values of frequencies and
amplitudes of the respective accelerations of body1 (chassis) and body2 (shaker) were identified by employing
the FFT tool box of the MATLAB software. As a result the spectrograms showing the accelerations versus
frequency were constructed and the data obtained from them are listed in Table 4. It is found again that the two
bodies oscillate with the same frequency but have different accelerations, which relate to the difference in their
masses and ones again due to different voltage supplied to the motor. Incredibly, it was also found that the
relative acceleration between the shaker and the chassis appears to be the sum of the magnitudes of the
respective bodies accelerations, having about 0.61% to 0.68% difference. It was agreed to neglect that
difference which is considered small and compatible with the accuracy of the experimental equipment. Another
series of five experiments were conducted to investigate the accelerations and frequencies of the robot when it
was in motion but subjected to its maximum towing force. This is done by using a load cell attached to body1 as
shown in Fig. 23. The results of these experiments were listed in Table 5 and thoroughly analyzed to find out the
effect of the towing force on the accelerations and resonance frequencies developed by the propulsion system of
the robot when it is fully loaded. It is found that body1 and 2 oscillate with the same frequencies but have
slightly different accelerations ones again due to somewhat different power supply in each experiment.
It is also discovered that body1 has three significant frequencies with the lowest one being 10.74 Hz.
So the second significant frequencies of body1 is found to be twice the lowest one, mainly: f1,2=2 (f1,1=10.74)
= 21.48 Hz, and the third one is triple the lowest frequency, or f1,3 = 3 (f1,1=10.74) =31.98 Hz. Therefore these
frequencies appear to be multiple to the lowest frequency of body1. Finally the average frequency of body1 is
found to be 10.4 Hz and the same applies to the frequencies of body2, which average frequency was constant
equal to 10.4 Hz. Comparing the average accelerations and average frequencies of the moving robot without any
towing force acting on it and the loaded robot listed in Table 5, it is found that the accelerations of body1 and
body2 are 11.5 m/s2 and 12. 2 m/s2 respectively with their average frequencies being both equal to 10.4 Hz. On
the other hand for the loaded moving robot the respective average accelerations are 15.8 m/s2 and 17.5 m/s2,
while their frequencies are the same but equal to 8.4 Hz. The analysis revealed that when the robot is loaded by
the towing force the accelerations of body1 and body2 increased by 37.4 % and 43.4% respectively, whiles the
average frequencies of their oscillations drop by 23.8%. These findings suggest that there is a significant
interaction between the oscillations of the bodies in the system and the components become more stressed when
the robot is loaded rather than when it is unloaded. Practically it means that there will be a possibility of
DOI: 10.9790/1684-12426273
www.iosrjournals.org
72 | Page
Experimental Determination of Dynamic Characteristics
arranging the propulsion system in such a way so as to achieve and appropriate transmission of energy from
body2 to body1 and minimize the inertial loads. This could be set by selecting appropriate spring stiffness, mass
ratio and introduce an adequate damping in order to maximize the mean velocity of body1, increase the robot
displacement per cycle of oscillations and the take full advantage of the towing force.
VII.
Conclusions
This paper presents the experimentally determined dynamic characteristics of a prototype wheeled
robot, which physical model is shown in Figs. 1, 2 and Fig. 4 along with the measuring and data-log system
illustrated in Fig. 3. The determined accelerations and frequencies of body1 and body2 are listed in Tables 2, 3,
4 and 5. They are of good accuracy due to the use of a sophisticated measuring and data-log system as well as
using the analyzing FFT tool box in the MATLAB software. The results will be used in a forthcoming study of
the same physical model of the robot as reference data and compared with the theoretically identified parameters
of the system. However, if a modified vibration-driven robot is investigated, it would require conducting similar
experimental study and analysis in order to obtain comparable parameters corresponding to the modified model.
To improve the towing ability and the mean velocity of the mobile robot it may be recommended to conduct an
optimization study and find out the influence of the individual dynamic parameters determined in this study
upon the robot mean velocity and the towing force. Obviously a Multicriteria parametric optimization would be
required as most of the determined parameters have significant influence upon the robot performance
characteristics. On the other hand to improve the efficiency of the robot propulsion system it would require
introducing another degree of freedom in the system. This eventually would have given the opportunity of
utilizing part of the rest 50% of the input energy so far lost during the return stroke in the one-way bearings. In
conclusions it may be stated that the experimental investigation described in this study provides important
values for the dynamic parameters of the prototype robot. They would ultimately be employed in further
optimization analysis to find out the optimum values of these parameters in order to maximize the mean velocity
and the towing force of the robot, combined with reduced inertial loads upon the components of the system.
Acknowledgments
This study was made possible thanks to the research Project FNI-RU, 2015-F-01 funded by the
University of Ruse, Bulgaria. The authors are sincerely grateful to V.G. Vitliemov, I.V. Ivanov, S.G. Stoyanov
and V.S. Bozduganova from the department of Technical Mechanics for their continuous support and inspiration
during the project development. The authors also express their gratitude to Mr. E.G. Stanev for his assistance.
References
[1].
[2].
[3].
[4].
[5].
[6].
[7].
[8].
[9].
[10].
[11].
Loukanov I. A., Vibration Propulsion of a Mobile Robot. IOSR Journal of Mechanical and Civil Engineering, Vol. 12, Issue 2
Version II, 2015, pp. 23-33, www.iosrjournals.org
Loukanov I. A., Application of Inertial Forces for generating Unidirectional Motion, Proceedings of the Scientific Conference of
University of Ruse, Vol. 53, Series 2, 2014, ( - 2014, T 53,
C 2).
Goncharevich I. F., Vibrations A Non Standard Approach. (Academy of Science of USSR Publishing House Nauka, 1986,
Moscow, 204 pages, in Russian).
Chernousko F.L., About the motion of a body containing internal moving mass. // (Conference Paper published by the Russian
Academy of Science, Vol. 405, 1, p. 1-5, 2005, in Russian).
Lupehina, I.V., A study of a Mobile Vibration System, moving with a Breakaway from the surface. Journal of Computer and
System Sciences International, Vol. 50, No. 2, 2011, pp.336-347
Lupehina, I.V., Modelling of Hopping Robot with Active Vibro-isolation for on Board equipment. Proceedings of (CLAWAR) 12th International Conference on Climbing and Walking Robots and their Supporting Technologies. Istanbul, 2009, Turkey, pp.
869-876.
Jatsun C.F., Volkova L. Ju., Modelling of the dynamic regimes of a vibration robot moving on a surface with fluid friction. J ournal
of Superior Technics & Communications, Vol. 3, 2012, pp. 23-29 (in Russian).
Provatidis Ch. G., Mechanics of Dean Drive on Frictional Grounds. Journal of Mechanical Design and Vibrations, Vol. 1, No. 1 ,
2013, pp. 10-19, Science and Publication Publishing. Available on http://pubs.sciepub.com/jmdv/1/1/3, DOI:10.12691/jmdv/1/1/3.
Provatidis Ch. G., Design of A Propulsion Cycle for Endless Sliding on Frictional Ground Using Rotating Masses, Universal
Journal of Mechanical Engineering Vol. 2 (2): 35-43, 2014. Available on http://www.hrpub.org/journals/article_info.php?aid=1245,
DOI: 10.13189/ ujme.2014.020201.
Jatsun C.F., Mishchenko V. Ja., Russian Patent No. 88639, MPK B62D 57/00. Vibration propeller.
Jatsun S. F., Bolotnik N., Zimmerman K., Zeidis I., Modeling of Motion of Vibrating Robots, 12-th IFToMM World Congress,
Besanon (France), June 18-21, 2007.
DOI: 10.9790/1684-12426273
www.iosrjournals.org
73 | Page
S-ar putea să vă placă și
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- "I Am Not Gay Says A Gay Christian." A Qualitative Study On Beliefs and Prejudices of Christians Towards Homosexuality in ZimbabweDocument5 pagini"I Am Not Gay Says A Gay Christian." A Qualitative Study On Beliefs and Prejudices of Christians Towards Homosexuality in ZimbabweInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- The Role of Extrovert and Introvert Personality in Second Language AcquisitionDocument6 paginiThe Role of Extrovert and Introvert Personality in Second Language AcquisitionInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- The Impact of Technologies On Society: A ReviewDocument5 paginiThe Impact of Technologies On Society: A ReviewInternational Organization of Scientific Research (IOSR)100% (1)
- A Review of Rural Local Government System in Zimbabwe From 1980 To 2014Document15 paginiA Review of Rural Local Government System in Zimbabwe From 1980 To 2014International Organization of Scientific Research (IOSR)Încă nu există evaluări
- A Proposed Framework On Working With Parents of Children With Special Needs in SingaporeDocument7 paginiA Proposed Framework On Working With Parents of Children With Special Needs in SingaporeInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Attitude and Perceptions of University Students in Zimbabwe Towards HomosexualityDocument5 paginiAttitude and Perceptions of University Students in Zimbabwe Towards HomosexualityInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Socio-Ethical Impact of Turkish Dramas On Educated Females of Gujranwala-PakistanDocument7 paginiSocio-Ethical Impact of Turkish Dramas On Educated Females of Gujranwala-PakistanInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Assessment of The Implementation of Federal Character in Nigeria.Document5 paginiAssessment of The Implementation of Federal Character in Nigeria.International Organization of Scientific Research (IOSR)Încă nu există evaluări
- An Evaluation of Lowell's Poem "The Quaker Graveyard in Nantucket" As A Pastoral ElegyDocument14 paginiAn Evaluation of Lowell's Poem "The Quaker Graveyard in Nantucket" As A Pastoral ElegyInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Relationship Between Social Support and Self-Esteem of Adolescent GirlsDocument5 paginiRelationship Between Social Support and Self-Esteem of Adolescent GirlsInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Investigation of Unbelief and Faith in The Islam According To The Statement, Mr. Ahmed MoftizadehDocument4 paginiInvestigation of Unbelief and Faith in The Islam According To The Statement, Mr. Ahmed MoftizadehInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Edward Albee and His Mother Characters: An Analysis of Selected PlaysDocument5 paginiEdward Albee and His Mother Characters: An Analysis of Selected PlaysInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Comparative Visual Analysis of Symbolic and Illegible Indus Valley Script With Other LanguagesDocument7 paginiComparative Visual Analysis of Symbolic and Illegible Indus Valley Script With Other LanguagesInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Topic: Using Wiki To Improve Students' Academic Writing in English Collaboratively: A Case Study On Undergraduate Students in BangladeshDocument7 paginiTopic: Using Wiki To Improve Students' Academic Writing in English Collaboratively: A Case Study On Undergraduate Students in BangladeshInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Transforming People's Livelihoods Through Land Reform in A1 Resettlement Areas in Goromonzi District in ZimbabweDocument9 paginiTransforming People's Livelihoods Through Land Reform in A1 Resettlement Areas in Goromonzi District in ZimbabweInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Importance of Mass Media in Communicating Health Messages: An AnalysisDocument6 paginiImportance of Mass Media in Communicating Health Messages: An AnalysisInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Human Rights and Dalits: Different Strands in The DiscourseDocument5 paginiHuman Rights and Dalits: Different Strands in The DiscourseInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Beowulf: A Folktale and History of Anglo-Saxon Life and CivilizationDocument3 paginiBeowulf: A Folktale and History of Anglo-Saxon Life and CivilizationInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- An Exploration On The Relationship Among Learners' Autonomy, Language Learning Strategies and Big-Five Personality TraitsDocument6 paginiAn Exploration On The Relationship Among Learners' Autonomy, Language Learning Strategies and Big-Five Personality TraitsInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- The Lute Against Doping in SportDocument5 paginiThe Lute Against Doping in SportInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Role of Madarsa Education in Empowerment of Muslims in IndiaDocument6 paginiRole of Madarsa Education in Empowerment of Muslims in IndiaInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Women Empowerment Through Open and Distance Learning in ZimbabweDocument8 paginiWomen Empowerment Through Open and Distance Learning in ZimbabweInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Classical Malay's Anthropomorphemic Metaphors in Essay of Hikajat AbdullahDocument9 paginiClassical Malay's Anthropomorphemic Metaphors in Essay of Hikajat AbdullahInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Substance Use and Abuse Among Offenders Under Probation Supervision in Limuru Probation Station, KenyaDocument11 paginiSubstance Use and Abuse Among Offenders Under Probation Supervision in Limuru Probation Station, KenyaInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Kinesics, Haptics and Proxemics: Aspects of Non - Verbal CommunicationDocument6 paginiKinesics, Haptics and Proxemics: Aspects of Non - Verbal CommunicationInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- A Study On The Television Programmes Popularity Among Chennai Urban WomenDocument7 paginiA Study On The Television Programmes Popularity Among Chennai Urban WomenInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Designing of Indo-Western Garments Influenced From Different Indian Classical Dance CostumesDocument5 paginiDesigning of Indo-Western Garments Influenced From Different Indian Classical Dance CostumesIOSRjournalÎncă nu există evaluări
- Motivational Factors Influencing Littering in Harare's Central Business District (CBD), ZimbabweDocument8 paginiMotivational Factors Influencing Littering in Harare's Central Business District (CBD), ZimbabweInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Micro Finance and Women - A Case Study of Villages Around Alibaug, District-Raigad, Maharashtra, IndiaDocument3 paginiMicro Finance and Women - A Case Study of Villages Around Alibaug, District-Raigad, Maharashtra, IndiaInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Design Management, A Business Tools' Package of Corporate Organizations: Bangladesh ContextDocument6 paginiDesign Management, A Business Tools' Package of Corporate Organizations: Bangladesh ContextInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Bionanotechnology - E. Papazoglou, A. Parthasarathy (2007) WWDocument148 paginiBionanotechnology - E. Papazoglou, A. Parthasarathy (2007) WWbicarbonat100% (2)
- Chemical Engineering Past Present and FutureDocument2 paginiChemical Engineering Past Present and FutureArinjayKumarÎncă nu există evaluări
- Annexure-1 Wind Load ReportDocument4 paginiAnnexure-1 Wind Load ReportPrabartak DasÎncă nu există evaluări
- Sony MDS-JB920QS Service ManualDocument72 paginiSony MDS-JB920QS Service ManualSinisa SlavinicÎncă nu există evaluări
- Guide To Using The IEC 61557-12 Standard To Simplify The Setup of An Energy Measurement PlanDocument12 paginiGuide To Using The IEC 61557-12 Standard To Simplify The Setup of An Energy Measurement PlanmahmoudÎncă nu există evaluări
- Capability Guidance Sheet - Three Point EstimatesDocument1 paginăCapability Guidance Sheet - Three Point EstimatesSaleha ShakoorÎncă nu există evaluări
- REFERENCESDocument3 paginiREFERENCESCaye AregladoÎncă nu există evaluări
- Rubik's Revenge (4x4x4)Document5 paginiRubik's Revenge (4x4x4)Febbi Abdul MuktiÎncă nu există evaluări
- Situation 1. Oil at Specific Gravity 0.761 Flows From Tank A To Tank E, As ShownDocument2 paginiSituation 1. Oil at Specific Gravity 0.761 Flows From Tank A To Tank E, As ShownAgerico FunelasÎncă nu există evaluări
- PIA CAE SolidworksDocument15 paginiPIA CAE SolidworksCchh UuyyÎncă nu există evaluări
- Enter Your Response (As An Integer) Using The Virtual Keyboard in The Box Provided BelowDocument102 paginiEnter Your Response (As An Integer) Using The Virtual Keyboard in The Box Provided BelowCharlie GoyalÎncă nu există evaluări
- ModuleDocument22 paginiModulesugiartoÎncă nu există evaluări
- Phys 1011 Final SAMPLEDocument10 paginiPhys 1011 Final SAMPLEJonah the mixerÎncă nu există evaluări
- Acids and Bases (1) Students ActivityDocument5 paginiAcids and Bases (1) Students ActivityTeacher CarlaÎncă nu există evaluări
- Separation Science - Chromatography Unit Thomas Wenzel Department of Chemistry Bates College, Lewiston ME 04240 Twenzel@bates - EduDocument69 paginiSeparation Science - Chromatography Unit Thomas Wenzel Department of Chemistry Bates College, Lewiston ME 04240 Twenzel@bates - EduthecriticÎncă nu există evaluări
- Adore Noir 028Document110 paginiAdore Noir 028Alex Scribd-Bernardin100% (3)
- Finisher q1 q3 PMDocument62 paginiFinisher q1 q3 PMutilscÎncă nu există evaluări
- PipephaseDocument32 paginiPipephaseZadeh NormanÎncă nu există evaluări
- Full Lab Report #8Document13 paginiFull Lab Report #8Joe Morrison100% (2)
- Rectifier Comissiong and Alarm SimulationDocument12 paginiRectifier Comissiong and Alarm SimulationsohaibjamilÎncă nu există evaluări
- Solid Works EMS TutorialsDocument353 paginiSolid Works EMS TutorialsAnonymous sAmJfcV100% (1)
- AudiV6TDI MechanicsDocument15 paginiAudiV6TDI Mechanicsmarc4266Încă nu există evaluări
- ALFANOVA RZ018 Press Test ProcedureDocument3 paginiALFANOVA RZ018 Press Test ProceduresalamrefighÎncă nu există evaluări
- Autopano Giga 2.6 User ManualDocument80 paginiAutopano Giga 2.6 User ManualMiBayatiÎncă nu există evaluări
- Metal FormingDocument13 paginiMetal Formingabdsu75Încă nu există evaluări
- Jackson 11.14 Homework Problem SolutionDocument4 paginiJackson 11.14 Homework Problem SolutionPero PericÎncă nu există evaluări
- Photodegradation and Photostabilization of PSDocument32 paginiPhotodegradation and Photostabilization of PSMinhAnhÎncă nu există evaluări
- D6937 4047 PDFDocument2 paginiD6937 4047 PDFEmily MurilloÎncă nu există evaluări
- Algebra Age ProblemsDocument5 paginiAlgebra Age ProblemswarlockeÎncă nu există evaluări
- Wavelenght GuidesDocument13 paginiWavelenght GuidesLuisAntonioRomeroÎncă nu există evaluări