S-ar putea să vă placă și
- 5L40EDocument381 pagini5L40ERichard Andrianjaka Lucky92% (13)
- Math 321 NotesDocument95 paginiMath 321 Notesnoahb110Încă nu există evaluări
- SIMPACK Interfaces MATLAB/SimulinkDocument2 paginiSIMPACK Interfaces MATLAB/SimulinkjithukkÎncă nu există evaluări
- Dantec Keypoint G4: Technical SpecificationsDocument2 paginiDantec Keypoint G4: Technical SpecificationsVladi Clima100% (1)
- Lab Manual Electrical Machines Lab PTUKDocument151 paginiLab Manual Electrical Machines Lab PTUKTareq FoQhaÎncă nu există evaluări
- A User-Material Subroutine Incorporating Single Crystal Plasticity in The Abaqus Finite Element ProgramDocument47 paginiA User-Material Subroutine Incorporating Single Crystal Plasticity in The Abaqus Finite Element ProgramangrycabbageÎncă nu există evaluări
- Xact UserDocument268 paginiXact Userwenyuchen96Încă nu există evaluări
- Solution of The ST Venant Equations (Part 2)Document61 paginiSolution of The ST Venant Equations (Part 2)abdul_348100% (2)
- BPM Third Wave Smith Fingar Apr2003 PDFDocument10 paginiBPM Third Wave Smith Fingar Apr2003 PDFNadeem AzadÎncă nu există evaluări
- Leeds TOR 18FG User ManualDocument9 paginiLeeds TOR 18FG User ManualMichael de la FuenteÎncă nu există evaluări
- XN-L E Chap06 Error MessagesDocument136 paginiXN-L E Chap06 Error Messagessuraj adhikariÎncă nu există evaluări
- Circuit Analysis 2 Lab Report 2 Pieas PakistanDocument6 paginiCircuit Analysis 2 Lab Report 2 Pieas PakistanMUYJ NewsÎncă nu există evaluări
- Experiment # 01Document9 paginiExperiment # 01M.USMAN BIN AHMEDÎncă nu există evaluări
- Initial Approximations for 3D Conformal Coordinate TransformationDocument5 paginiInitial Approximations for 3D Conformal Coordinate TransformationRatihDwiJÎncă nu există evaluări
- PARTS LIST TITLEDocument1.208 paginiPARTS LIST TITLEOmar GómezÎncă nu există evaluări
- Digital Image Processing - DR - B.chandra MohanDocument63 paginiDigital Image Processing - DR - B.chandra MohanPriyaÎncă nu există evaluări
- Alkhidmat Diagnostic Center Blood Bank: HaematologyDocument1 paginăAlkhidmat Diagnostic Center Blood Bank: HaematologyNasir Badshah AfridiÎncă nu există evaluări
- XN L Series Product Specification June2017 PDFDocument1 paginăXN L Series Product Specification June2017 PDFdimashmpÎncă nu există evaluări
- Microlab 300 Host Protocol v1 0Document9 paginiMicrolab 300 Host Protocol v1 0Mahmood RazaÎncă nu există evaluări
- ANNA UNIVERSITY MECHANICAL ENGINEERING SIMULATION LAB EXAMDocument5 paginiANNA UNIVERSITY MECHANICAL ENGINEERING SIMULATION LAB EXAMAsst.Prof MECH100% (1)
- Operating Instructions Photometer 4040: Robert Riele GMBH & Co KGDocument73 paginiOperating Instructions Photometer 4040: Robert Riele GMBH & Co KGmohamed abdelzaherÎncă nu există evaluări
- TRS-398 HE Electrons v1.06Document4 paginiTRS-398 HE Electrons v1.06TarekShabakaÎncă nu există evaluări
- Dixion EngDocument24 paginiDixion Engiman hilmanÎncă nu există evaluări
- Smu ProjectDocument115 paginiSmu ProjectDinesh RatnakarÎncă nu există evaluări
- Logger UCAM-70A PDFDocument3 paginiLogger UCAM-70A PDFjbmune6683Încă nu există evaluări
- An-MPU-9250A-03 MPU-9250 Accel Gyro and Compass Self-Test Implementation v1 0 - 062813Document14 paginiAn-MPU-9250A-03 MPU-9250 Accel Gyro and Compass Self-Test Implementation v1 0 - 062813Herry WijayaÎncă nu există evaluări
- W07 L4 DiodesDocument48 paginiW07 L4 DiodesManjot KaurÎncă nu există evaluări
- Exam QuestionsDocument10 paginiExam QuestionsJohnÎncă nu există evaluări
- Iterative Solutions of Large-Scale Linear Systems from Biot's Consolidation EquationsDocument258 paginiIterative Solutions of Large-Scale Linear Systems from Biot's Consolidation EquationsKarena QuirozÎncă nu există evaluări
- Numerical Methods For Scientific and Engineering Computation - M. K. Jain, S. R. K. Iyengar and R. K. JainDocument161 paginiNumerical Methods For Scientific and Engineering Computation - M. K. Jain, S. R. K. Iyengar and R. K. JainSanket LimbitoteÎncă nu există evaluări
- TG-51 Worksheet A: Photon Beam Dosimetry ParametersDocument2 paginiTG-51 Worksheet A: Photon Beam Dosimetry ParametersLaurentiu RadoiÎncă nu există evaluări
- Optical Amplifier1Document8 paginiOptical Amplifier1Sunil FageriaÎncă nu există evaluări
- AAPM Report No. 13 Physical Aspects of Quality Assurance in Radiation TherapyDocument64 paginiAAPM Report No. 13 Physical Aspects of Quality Assurance in Radiation TherapySepti HidhayaniÎncă nu există evaluări
- Electronic Circuits Lab Manual Clippers and AmplifiersDocument29 paginiElectronic Circuits Lab Manual Clippers and AmplifiersAshwath NadahalliÎncă nu există evaluări
- Linear Regression: Major: All Engineering Majors Authors: Autar Kaw, Luke SnyderDocument25 paginiLinear Regression: Major: All Engineering Majors Authors: Autar Kaw, Luke Snydergunawan refiadi100% (1)
- Computer Aided Machine DrawingDocument16 paginiComputer Aided Machine DrawingAmit BhagureÎncă nu există evaluări
- Eee4021 Sensors-And-Signal-Conditioning Eth 1.1 47 Eee4021 PDFDocument4 paginiEee4021 Sensors-And-Signal-Conditioning Eth 1.1 47 Eee4021 PDFManan ModiÎncă nu există evaluări
- InterpolationDocument13 paginiInterpolationEr Aamir MaqboolÎncă nu există evaluări
- Matrix Calculations in Excel PDFDocument37 paginiMatrix Calculations in Excel PDFBabak Esmailzadeh HakimiÎncă nu există evaluări
- HPLC Back to Basics: Fundamentals of Liquid ChromatographyDocument14 paginiHPLC Back to Basics: Fundamentals of Liquid Chromatographykir223Încă nu există evaluări
- 23 Electronic TheodolitesDocument4 pagini23 Electronic TheodolitesEmaÎncă nu există evaluări
- Reduced Lattice Thermal Conductivity of Ti-Site Substituted Transition Metals Ti TM Nisn: A Quasi-Harmonic Debye Model StudyDocument14 paginiReduced Lattice Thermal Conductivity of Ti-Site Substituted Transition Metals Ti TM Nisn: A Quasi-Harmonic Debye Model StudymekkiÎncă nu există evaluări
- InterpolationDocument25 paginiInterpolationAjay SinghÎncă nu există evaluări
- Matlab ExamplesDocument12 paginiMatlab ExamplesNazareno BragaÎncă nu există evaluări
- Cadcam Geometric ModelingDocument31 paginiCadcam Geometric ModelingPankaj ChhabraÎncă nu există evaluări
- Stanford Linear System TheoryDocument431 paginiStanford Linear System TheoryNurhan Arslan100% (1)
- MechatronicsDocument9 paginiMechatronicsjahnaviÎncă nu există evaluări
- Series-parallel DC circuits worksheetDocument48 paginiSeries-parallel DC circuits worksheetbryarÎncă nu există evaluări
- Huq CT SimulatorDocument65 paginiHuq CT SimulatorEskadmas BelayÎncă nu există evaluări
- Due: Monday September 17: Homework 2 - Solution ECE 445 Biomedical Instrumentation, Fall 2012Document3 paginiDue: Monday September 17: Homework 2 - Solution ECE 445 Biomedical Instrumentation, Fall 2012amastasia salsaÎncă nu există evaluări
- c-14 Urea Breath TestDocument3 paginic-14 Urea Breath Testahmedmaksoud2036Încă nu există evaluări
- Sortex DoktoratDocument191 paginiSortex DoktoratmradojcinÎncă nu există evaluări
- 2005 Magnetom Flash 2 2Document52 pagini2005 Magnetom Flash 2 2Herick SavioneÎncă nu există evaluări
- Introduction To CPFEM Manual-1Document20 paginiIntroduction To CPFEM Manual-1Nahide TütenÎncă nu există evaluări
- CT Scan ProtocolDocument12 paginiCT Scan Protocolzeklawy73Încă nu există evaluări
- Mesh-Intro 17.0 M05 Mesh Quality and Advanced TopicsDocument39 paginiMesh-Intro 17.0 M05 Mesh Quality and Advanced Topicsjust randomÎncă nu există evaluări
- How to Select the Right Cylindrical Lens for Your ApplicationDocument8 paginiHow to Select the Right Cylindrical Lens for Your ApplicationNina DjawaÎncă nu există evaluări
- Image Compression Using Block Truncation CodingDocument5 paginiImage Compression Using Block Truncation CodingCyberJournals MultidisciplinaryÎncă nu există evaluări
- MATH 2P20 Numerical Analysis Lecture NotesDocument98 paginiMATH 2P20 Numerical Analysis Lecture NotessamiabushnaqÎncă nu există evaluări
- Klein Berg BookDocument459 paginiKlein Berg BookAbhinav PujariÎncă nu există evaluări
- Reader (09 10)Document232 paginiReader (09 10)Dylan LerÎncă nu există evaluări
- Graph Theory in Modern Engineering: Computer Aided Design, Control, Optimization, Reliability AnalysisDe la EverandGraph Theory in Modern Engineering: Computer Aided Design, Control, Optimization, Reliability AnalysisÎncă nu există evaluări
- Calculate New Salary Tax by Ather SaleemDocument2 paginiCalculate New Salary Tax by Ather Saleemabdul_348Încă nu există evaluări
- Making Factories Smarter, More Productive Through Predictive MaintenanceDocument8 paginiMaking Factories Smarter, More Productive Through Predictive Maintenanceabdul_348Încă nu există evaluări
- Solution of The ST Venant Equations (Part 1)Document58 paginiSolution of The ST Venant Equations (Part 1)abdul_348Încă nu există evaluări
- Engineer'sGuide - Salary PDFDocument12 paginiEngineer'sGuide - Salary PDFabdul_348Încă nu există evaluări
- Classification of Canal Control AlgorithmsDocument19 paginiClassification of Canal Control Algorithmsabdul_348Încă nu există evaluări
- William Timothy Gowers The Importance of MathematicsDocument23 paginiWilliam Timothy Gowers The Importance of MathematicsfuxitÎncă nu există evaluări
- MATH 343/534 Optimization Techniques Dr. Faqir BhattiDocument5 paginiMATH 343/534 Optimization Techniques Dr. Faqir Bhattiabdul_348Încă nu există evaluări
- Pid TFDocument1 paginăPid TFabdul_348Încă nu există evaluări
- Sprunt90aperiodic PDFDocument20 paginiSprunt90aperiodic PDFabdul_348Încă nu există evaluări
- MATH 462 512 CS 502 Dynamical Systems Adnan KhanDocument3 paginiMATH 462 512 CS 502 Dynamical Systems Adnan Khanabdul_348Încă nu există evaluări
- Guided Robotics Internship Using iRobot CreateDocument6 paginiGuided Robotics Internship Using iRobot Createabdul_348Încă nu există evaluări
- Lahore University of Management SciencesDocument17 paginiLahore University of Management Scienceshamza.ayubÎncă nu există evaluări
- Computer Science & Engineering Department ElectivesDocument13 paginiComputer Science & Engineering Department Electivesnitro gtnaÎncă nu există evaluări
- History of JS: From Netscape to Modern WebDocument2 paginiHistory of JS: From Netscape to Modern WebJerraldÎncă nu există evaluări
- Nonwoven Material StandardsDocument5 paginiNonwoven Material StandardsRajesh Dwivedi0% (1)
- Electric Rolling Bridge, Scientific American 24 August 1889 p120Document2 paginiElectric Rolling Bridge, Scientific American 24 August 1889 p120Rm1262Încă nu există evaluări
- Civil-Vii-Air Pollution and Control (10cv765) - Question PaperDocument4 paginiCivil-Vii-Air Pollution and Control (10cv765) - Question PaperSathya MurthyÎncă nu există evaluări
- Monopoly - Indian Railways: - Anand Dube - Darshna Chande - Karan Sobti - Sriaditya Kasula - Vinay ChaudhariDocument52 paginiMonopoly - Indian Railways: - Anand Dube - Darshna Chande - Karan Sobti - Sriaditya Kasula - Vinay ChaudhariKristamRajuÎncă nu există evaluări
- PM IS - 12818 June2021Document10 paginiPM IS - 12818 June2021Mahendra AhirwarÎncă nu există evaluări
- Lincoln FC ElectrodesDocument44 paginiLincoln FC ElectrodeszmcgainÎncă nu există evaluări
- My Oracle Support - Knowledge Browser - 1441364Document9 paginiMy Oracle Support - Knowledge Browser - 1441364Aman Khan Badal KhanÎncă nu există evaluări
- 2SC1344, 2SC1345: Silicon NPN EpitaxialDocument9 pagini2SC1344, 2SC1345: Silicon NPN EpitaxialrolandseÎncă nu există evaluări
- Soil CompactionDocument13 paginiSoil Compactionbishry ahamedÎncă nu există evaluări
- Thermodynamic Revision DocumentsDocument7 paginiThermodynamic Revision DocumentshakimiÎncă nu există evaluări
- BaaN IV VDADocument126 paginiBaaN IV VDARostane Horvath ErzsebetÎncă nu există evaluări
- WT Lab ManualDocument44 paginiWT Lab ManualVenkatanagasudheer Thummapudi100% (1)
- Manufacturing of Urea Through Synthetic Ammonia Project ReportDocument5 paginiManufacturing of Urea Through Synthetic Ammonia Project ReportvishnuÎncă nu există evaluări
- Homework 3 - Instant Centers Solution Part 2Document9 paginiHomework 3 - Instant Centers Solution Part 2李明安Încă nu există evaluări
- 92v Parts List ViperDocument194 pagini92v Parts List Viperreltih18Încă nu există evaluări
- Micom p343Document66 paginiMicom p343kjfenÎncă nu există evaluări
- Project-BOQ - (Excluding VUP, LVUP)Document127 paginiProject-BOQ - (Excluding VUP, LVUP)Shivendra KumarÎncă nu există evaluări
- En 808D Commissioning Guide 2013-09Document98 paginiEn 808D Commissioning Guide 2013-09Sam eagle goodÎncă nu există evaluări
- Aniosyme DD1 SDSDocument6 paginiAniosyme DD1 SDSSherwin CruzÎncă nu există evaluări
- Ganz Hydro-Power: Over 150 Years of ExperienceDocument1 paginăGanz Hydro-Power: Over 150 Years of ExperiencepalanaruvaÎncă nu există evaluări
- SCT3030AL: 650V V R (Typ.) 30mDocument14 paginiSCT3030AL: 650V V R (Typ.) 30mSas Pro EletronicaÎncă nu există evaluări
- Elsa CableDocument2 paginiElsa CableJay WangÎncă nu există evaluări
- 2.ARC - ARC Binh Duong ASRS - Quotation For PK2 - Panel and Refrigeration System - Phase 2 - 2020 10 28Document12 pagini2.ARC - ARC Binh Duong ASRS - Quotation For PK2 - Panel and Refrigeration System - Phase 2 - 2020 10 28vu nguyen ngocÎncă nu există evaluări
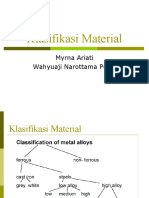
- Klasifikasi Material: Myrna Ariati Wahyuaji Narottama PutraDocument49 paginiKlasifikasi Material: Myrna Ariati Wahyuaji Narottama Putrachink07Încă nu există evaluări
- CoP Fo Petroleum Road Tanker Vapour Collection Systems and Equipment Used in Unloading OperationsDocument29 paginiCoP Fo Petroleum Road Tanker Vapour Collection Systems and Equipment Used in Unloading OperationsMuhammad Ibad AlamÎncă nu există evaluări
- TMForumOpenAPIs EnablingAZeroIntergrationAPIeconomyDocument30 paginiTMForumOpenAPIs EnablingAZeroIntergrationAPIeconomyjdaoukÎncă nu există evaluări