S-ar putea să vă placă și
- The Crafty Kids Guide to DIY Electronics: 20 Fun Projects for Makers, Crafters, and Everyone in BetweenDe la EverandThe Crafty Kids Guide to DIY Electronics: 20 Fun Projects for Makers, Crafters, and Everyone in BetweenÎncă nu există evaluări
- Testing Method For SuspensionDocument131 paginiTesting Method For SuspensionAliÎncă nu există evaluări
- 10 1 1 6Document148 pagini10 1 1 6Lky LauÎncă nu există evaluări
- Haigh DiagramDocument5 paginiHaigh Diagramravi sankarÎncă nu există evaluări
- Aerodynamic Analysis of Motion of Two Vehicles and Their Influence On Drag Coefficient.Document3 paginiAerodynamic Analysis of Motion of Two Vehicles and Their Influence On Drag Coefficient.Innovative Research PublicationsÎncă nu există evaluări
- 2015 - Finite Element Modelling of Debonding Failures in Steel Beams Flexurally Strengthened With CFRP Laminates - Teng Fernando Yu PDFDocument12 pagini2015 - Finite Element Modelling of Debonding Failures in Steel Beams Flexurally Strengthened With CFRP Laminates - Teng Fernando Yu PDFvlad lupasteanuÎncă nu există evaluări
- Finite Element Analysis of Fatigue Life of Suspension Coil SpringDocument6 paginiFinite Element Analysis of Fatigue Life of Suspension Coil SpringSameer SinghÎncă nu există evaluări
- Bond-Slip Model For Detailed Finite-Element AnalysisDocument10 paginiBond-Slip Model For Detailed Finite-Element AnalysisSilver rayleighÎncă nu există evaluări
- MESYS Shaft CalculationDocument28 paginiMESYS Shaft CalculationZoebairÎncă nu există evaluări
- IJREI - Vibration Analysis and Response Characteristics of A Half Car Model Subjected To Different Sinusoidal Road ExcitationDocument6 paginiIJREI - Vibration Analysis and Response Characteristics of A Half Car Model Subjected To Different Sinusoidal Road ExcitationIjrei JournalÎncă nu există evaluări
- Brake Analysis and NVH Optimization Using MSC - nastRANDocument15 paginiBrake Analysis and NVH Optimization Using MSC - nastRANMihir ShahÎncă nu există evaluări
- Bevel GearDocument17 paginiBevel Gearparesh09Încă nu există evaluări
- Topology Optimization To Torque Arm in Landing Gear System Based On ANSYS WorkbenchDocument5 paginiTopology Optimization To Torque Arm in Landing Gear System Based On ANSYS WorkbenchAnnaÎncă nu există evaluări
- Modal Space - in Our Own Little World: by Pete AvitabileDocument2 paginiModal Space - in Our Own Little World: by Pete AvitabileVignesh SelvarajÎncă nu există evaluări
- Hydraulics: Pressure Transducer With LMS™ Amesim™ Student EditionDocument5 paginiHydraulics: Pressure Transducer With LMS™ Amesim™ Student EditionSergio SmithÎncă nu există evaluări
- A Tool For Lap Time Simulation PDFDocument5 paginiA Tool For Lap Time Simulation PDFRodrigo BobÎncă nu există evaluări
- Subroutine For Cohesive ElementDocument41 paginiSubroutine For Cohesive ElementBhushanRaj100% (1)
- Abaqus-Excite Workflow in Automotive Powertrain AnalysisDocument12 paginiAbaqus-Excite Workflow in Automotive Powertrain AnalysisDmitry GrenishenÎncă nu există evaluări
- Drag ForceDocument9 paginiDrag ForceImran BahaÎncă nu există evaluări
- A User-Material Subroutine Incorporating Single Crystal Plasticity in The Abaqus Finite Element ProgramDocument47 paginiA User-Material Subroutine Incorporating Single Crystal Plasticity in The Abaqus Finite Element ProgramangrycabbageÎncă nu există evaluări
- Apdl IntroDocument128 paginiApdl IntroRohitMadkeÎncă nu există evaluări
- Passive Suspoension Modeling Using Matlab Quarter Car Model Imput Isngal Step TypeDocument6 paginiPassive Suspoension Modeling Using Matlab Quarter Car Model Imput Isngal Step TypeChristian Mavarez0% (2)
- Design Optimization and Analysis of Leaf Spring Using Static Load ConditionsDocument7 paginiDesign Optimization and Analysis of Leaf Spring Using Static Load Conditionshariram palanisamyÎncă nu există evaluări
- Axle Application Guidelines: Revised 12-18Document99 paginiAxle Application Guidelines: Revised 12-18haviettuanÎncă nu există evaluări
- Low Cycle Fatigue Analysis of Gas Turbine BladeDocument6 paginiLow Cycle Fatigue Analysis of Gas Turbine BladeKaushikÎncă nu există evaluări
- 7 Christian Gaier Multi Axial Fatigue Analysis With The Fe Post Processor Femfat Utmis 2010Document50 pagini7 Christian Gaier Multi Axial Fatigue Analysis With The Fe Post Processor Femfat Utmis 2010ashish38799100% (2)
- Frequency Response of 10 Degrees of Freedom Full-Car Model For Ride ComfortDocument7 paginiFrequency Response of 10 Degrees of Freedom Full-Car Model For Ride ComfortijsretÎncă nu există evaluări
- Automotive NVH With AbaqusDocument17 paginiAutomotive NVH With Abaquspatran74Încă nu există evaluări
- Calculating and Displaying Fatigue ResultsDocument42 paginiCalculating and Displaying Fatigue ResultsBekirHanÎncă nu există evaluări
- Noise and Vibration in PM Motors - Sources and RemediesDocument35 paginiNoise and Vibration in PM Motors - Sources and RemediesVirgilioÎncă nu există evaluări
- The Physics of Suspensions Using Computer SimulationDocument7 paginiThe Physics of Suspensions Using Computer SimulationEric TendianÎncă nu există evaluări
- MESYS Shaft CalculationDocument51 paginiMESYS Shaft Calculationdd hhÎncă nu există evaluări
- 10 0000@www Sae Org@2019-26-0116Document7 pagini10 0000@www Sae Org@2019-26-0116JasonÎncă nu există evaluări
- Damping SystemDocument6 paginiDamping SystemEro DoppleganggerÎncă nu există evaluări
- Johnson-Cook Empirical ModelsDocument14 paginiJohnson-Cook Empirical ModelsSanaan Khan95% (21)
- Terminal Report ShredderDocument25 paginiTerminal Report ShredderEnriv YasiladÎncă nu există evaluări
- Durability and Fatigue Life Analysis Using MSC FatigueDocument2 paginiDurability and Fatigue Life Analysis Using MSC FatigueHumayun NawazÎncă nu există evaluări
- Active Suspension Control of Ground VehicleDocument6 paginiActive Suspension Control of Ground VehicleSanjay MehrishiÎncă nu există evaluări
- 2015 Composites Lab2Document28 pagini2015 Composites Lab2Lê Ngọc-HàÎncă nu există evaluări
- Torque Arm Shape OptimizationDocument8 paginiTorque Arm Shape OptimizationJay MalaneyÎncă nu există evaluări
- Spin Softening N Stress StiffeningDocument23 paginiSpin Softening N Stress StiffeningaruatscribdÎncă nu există evaluări
- Car Dynamics Using Quarter Model and Passive Suspension, PDFDocument9 paginiCar Dynamics Using Quarter Model and Passive Suspension, PDFwelsya100% (1)
- User Subroutines SummaryDocument12 paginiUser Subroutines SummaryHara Palleti0% (1)
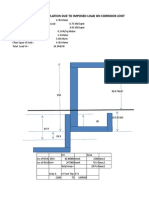
- Deflection Calculation Due To Imposed Load On Corridor JoistDocument14 paginiDeflection Calculation Due To Imposed Load On Corridor JoistranjitÎncă nu există evaluări
- Soluion Lab DFTDocument15 paginiSoluion Lab DFTLuisAlarconÎncă nu există evaluări
- Bevel ExplanationDocument4 paginiBevel ExplanationVarun VaidyaÎncă nu există evaluări
- Ansys Tutorial Forthe Torque Analysis of The Shaft Attached With Two DisksDocument13 paginiAnsys Tutorial Forthe Torque Analysis of The Shaft Attached With Two DisksPugazhenthi ThananjayanÎncă nu există evaluări
- Vibration AnalysisDocument25 paginiVibration AnalysisHarshal Avinash MungikarÎncă nu există evaluări
- Kinematics and Dynamics - Lab3 PDFDocument8 paginiKinematics and Dynamics - Lab3 PDFKunal SharmaÎncă nu există evaluări
- Damping DynaDocument15 paginiDamping DynasbhariÎncă nu există evaluări
- Damage Evolution LawDocument15 paginiDamage Evolution LawRafael ZanettiÎncă nu există evaluări
- Fracture Mechanics CharacterizationDocument124 paginiFracture Mechanics CharacterizationJose Luis GrajedaÎncă nu există evaluări
- CFX Fsi 6dofDocument26 paginiCFX Fsi 6dofCFDiran.irÎncă nu există evaluări
- Thesis Remco Advocaat 1275674Document131 paginiThesis Remco Advocaat 1275674Angel BorsaniÎncă nu există evaluări
- Dar Es Salaam Institute of Technology: Bachelor of Electrical Engineering Nta Level 8 Senior Project TwoDocument42 paginiDar Es Salaam Institute of Technology: Bachelor of Electrical Engineering Nta Level 8 Senior Project TwoGizzle LuizzleÎncă nu există evaluări
- Dte / Dve Energy Efficient Motors: CatalogDocument28 paginiDte / Dve Energy Efficient Motors: CatalogAndreia Gaspar TeixeiraÎncă nu există evaluări
- Sample Report1Document39 paginiSample Report1patil_555Încă nu există evaluări
- Thesina 797008Document69 paginiThesina 797008AhmadMoaazÎncă nu există evaluări
- F3-DP-2015-Hlinovsky-Tomas-Optimal Control of Mathematical Model of The ElectrovehicleDocument85 paginiF3-DP-2015-Hlinovsky-Tomas-Optimal Control of Mathematical Model of The ElectrovehiclecristiÎncă nu există evaluări
- Car Rental SystemDocument30 paginiCar Rental Systememprhaimquiambao03Încă nu există evaluări
- Suspension System: Presented By: Enzo Oestanto Mochammad Rizky DiprasetyaDocument10 paginiSuspension System: Presented By: Enzo Oestanto Mochammad Rizky DiprasetyaRizky DsÎncă nu există evaluări
- Assignment 1 - System Engineering - Neural Network Based Path Planning For Mecanum Wheeled Omni Directional RobotDocument12 paginiAssignment 1 - System Engineering - Neural Network Based Path Planning For Mecanum Wheeled Omni Directional RobotRizky DsÎncă nu există evaluări
- 1.1. Purpose: Something HereDocument7 pagini1.1. Purpose: Something HereRizky DsÎncă nu există evaluări
- COS 495 - Lecture 5 Autonomous Robot Navigation: Instructor: Chris Clark Semester: Fall 2011Document30 paginiCOS 495 - Lecture 5 Autonomous Robot Navigation: Instructor: Chris Clark Semester: Fall 2011flv_91Încă nu există evaluări
- Managing and Specifying Microcontroller Projects: Harold ConveyDocument78 paginiManaging and Specifying Microcontroller Projects: Harold ConveyRizky DsÎncă nu există evaluări
- Modelling Electromagnetic Suspension Force Using Measured Inductance-Airgap DataDocument4 paginiModelling Electromagnetic Suspension Force Using Measured Inductance-Airgap DataRizky DsÎncă nu există evaluări
- SL GsDocument80 paginiSL GsRizky DsÎncă nu există evaluări
- Alginate: Anionic Polysaccharide Cell Walls Brown Algae GumDocument1 paginăAlginate: Anionic Polysaccharide Cell Walls Brown Algae GumRizky DsÎncă nu există evaluări
- Tugas Eleng JumatDocument7 paginiTugas Eleng JumatRizky DsÎncă nu există evaluări
- Thesis Prototype SOP v1Document1 paginăThesis Prototype SOP v1Rizky DsÎncă nu există evaluări
- Beer and Its Production - NewaDocument13 paginiBeer and Its Production - NewaRizky DsÎncă nu există evaluări
- Lirik Run Devil RunDocument2 paginiLirik Run Devil RunRizky DsÎncă nu există evaluări
- Exp 5 - AspirinF11Document5 paginiExp 5 - AspirinF11Rizky DsÎncă nu există evaluări
- Physics 2 (MT) - Quiz 1a - SolutionDocument5 paginiPhysics 2 (MT) - Quiz 1a - SolutionRizky DsÎncă nu există evaluări
- Lirik Blue TomorrowDocument2 paginiLirik Blue TomorrowRizky DsÎncă nu există evaluări
- Apple Change ManagementDocument31 paginiApple Change ManagementimuffysÎncă nu există evaluări
- Promotion-Mix (: Tools For IMC)Document11 paginiPromotion-Mix (: Tools For IMC)Mehul RasadiyaÎncă nu există evaluări
- Mechanical Production Engineer Samphhhhhle ResumeDocument2 paginiMechanical Production Engineer Samphhhhhle ResumeAnirban MazumdarÎncă nu există evaluări
- PC Model Answer Paper Winter 2016Document27 paginiPC Model Answer Paper Winter 2016Deepak VermaÎncă nu există evaluări
- Building Services Planning Manual-2007Document122 paginiBuilding Services Planning Manual-2007razanmrm90% (10)
- Nadee 3Document1 paginăNadee 3api-595436597Încă nu există evaluări
- Dermatology Skin in Systemic DiseaseDocument47 paginiDermatology Skin in Systemic DiseaseNariska CooperÎncă nu există evaluări
- Head Coverings BookDocument86 paginiHead Coverings BookRichu RosarioÎncă nu există evaluări
- BrochureDocument3 paginiBrochureapi-400730798Încă nu există evaluări
- ELEVATOR DOOR - pdf1Document10 paginiELEVATOR DOOR - pdf1vigneshÎncă nu există evaluări
- Congenital Cardiac Disease: A Guide To Evaluation, Treatment and Anesthetic ManagementDocument87 paginiCongenital Cardiac Disease: A Guide To Evaluation, Treatment and Anesthetic ManagementJZÎncă nu există evaluări
- Training For Humans Guide: FAQ's How Many Sets/reps Should I Do Per Exercise?Document28 paginiTraining For Humans Guide: FAQ's How Many Sets/reps Should I Do Per Exercise?Paulo Pires100% (1)
- Cyber Briefing Series - Paper 2 - FinalDocument24 paginiCyber Briefing Series - Paper 2 - FinalMapacheYorkÎncă nu există evaluări
- UntitledDocument216 paginiUntitledMONICA SIERRA VICENTEÎncă nu există evaluări
- Lieh TzuDocument203 paginiLieh TzuBrent Cullen100% (2)
- Drive LinesDocument30 paginiDrive LinesRITESH ROHILLAÎncă nu există evaluări
- NCP - Major Depressive DisorderDocument7 paginiNCP - Major Depressive DisorderJaylord Verazon100% (1)
- Injections Quiz 2Document6 paginiInjections Quiz 2Allysa MacalinoÎncă nu există evaluări
- Caspar Hirschi - The Origins of Nationalism - An Alternative History From Ancient Rome To Early Modern Germany-Cambridge University Press (2012)Document255 paginiCaspar Hirschi - The Origins of Nationalism - An Alternative History From Ancient Rome To Early Modern Germany-Cambridge University Press (2012)Roc SolàÎncă nu există evaluări
- Catify To Satisfy - Simple Solutions For Creating A Cat-Friendly Home (PDFDrive)Document315 paginiCatify To Satisfy - Simple Solutions For Creating A Cat-Friendly Home (PDFDrive)Paz Libros100% (2)
- An Evaluation of MGNREGA in SikkimDocument7 paginiAn Evaluation of MGNREGA in SikkimBittu SubbaÎncă nu există evaluări
- Advanced Chemical Engineering Thermodynamics (Cheg6121) : Review of Basic ThermodynamicsDocument74 paginiAdvanced Chemical Engineering Thermodynamics (Cheg6121) : Review of Basic ThermodynamicsetayhailuÎncă nu există evaluări
- Standard Answers For The MSC ProgrammeDocument17 paginiStandard Answers For The MSC ProgrammeTiwiÎncă nu există evaluări
- 6GK74435DX040XE0 Datasheet enDocument3 pagini6GK74435DX040XE0 Datasheet enLuis CortezÎncă nu există evaluări
- Applied Economics 2Document8 paginiApplied Economics 2Sayra HidalgoÎncă nu există evaluări
- Julia Dito ResumeDocument3 paginiJulia Dito Resumeapi-253713289Încă nu există evaluări
- Fast Track Design and Construction of Bridges in IndiaDocument10 paginiFast Track Design and Construction of Bridges in IndiaSa ReddiÎncă nu există evaluări
- Winter CrocFest 2017 at St. Augustine Alligator Farm - Final ReportDocument6 paginiWinter CrocFest 2017 at St. Augustine Alligator Farm - Final ReportColette AdamsÎncă nu există evaluări
- PresentationDocument27 paginiPresentationMenuka WatankachhiÎncă nu există evaluări
- (1921) Manual of Work Garment Manufacture: How To Improve Quality and Reduce CostsDocument102 pagini(1921) Manual of Work Garment Manufacture: How To Improve Quality and Reduce CostsHerbert Hillary Booker 2nd100% (1)
- A Welder’s Handbook to Robotic ProgrammingDe la EverandA Welder’s Handbook to Robotic ProgrammingEvaluare: 5 din 5 stele5/5 (3)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindDe la EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindÎncă nu există evaluări
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureDe la EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureEvaluare: 4.5 din 5 stele4.5/5 (2)
- The Heart and the Chip: Our Bright Future with RobotsDe la EverandThe Heart and the Chip: Our Bright Future with RobotsÎncă nu există evaluări
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.De la EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Evaluare: 4 din 5 stele4/5 (5)
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!De la EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Evaluare: 4 din 5 stele4/5 (3)
- Digital Twin Development and Deployment on the Cloud: Developing Cloud-Friendly Dynamic Models Using Simulink®/SimscapeTM and Amazon AWSDe la EverandDigital Twin Development and Deployment on the Cloud: Developing Cloud-Friendly Dynamic Models Using Simulink®/SimscapeTM and Amazon AWSÎncă nu există evaluări
- ChatGPT: The Future of Intelligent ConversationDe la EverandChatGPT: The Future of Intelligent ConversationEvaluare: 3.5 din 5 stele3.5/5 (8)
- Artificial Intelligence: Learning about Chatbots, Robotics, and Other Business ApplicationsDe la EverandArtificial Intelligence: Learning about Chatbots, Robotics, and Other Business ApplicationsEvaluare: 5 din 5 stele5/5 (3)
- Practical Robotics in C++: Build and Program Real Autonomous Robots Using Raspberry Pi (English Edition)De la EverandPractical Robotics in C++: Build and Program Real Autonomous Robots Using Raspberry Pi (English Edition)Încă nu există evaluări
- The Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityDe la EverandThe Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityEvaluare: 3.5 din 5 stele3.5/5 (22)
- Building with Virtual LEGO: Getting Started with LEGO Digital Designer, LDraw, and MecabricksDe la EverandBuilding with Virtual LEGO: Getting Started with LEGO Digital Designer, LDraw, and MecabricksÎncă nu există evaluări
- SAM: One Robot, a Dozen Engineers, and the Race to Revolutionize the Way We BuildDe la EverandSAM: One Robot, a Dozen Engineers, and the Race to Revolutionize the Way We BuildEvaluare: 5 din 5 stele5/5 (5)
- Artificial Intelligence: From Medieval Robots to Neural NetworksDe la EverandArtificial Intelligence: From Medieval Robots to Neural NetworksEvaluare: 4 din 5 stele4/5 (4)
- Comprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessDe la EverandComprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessÎncă nu există evaluări
- The Long Hangover: Putin's New Russia and the Ghosts of the PastDe la EverandThe Long Hangover: Putin's New Russia and the Ghosts of the PastEvaluare: 4.5 din 5 stele4.5/5 (76)
- Artificial Intelligence: Machine Learning, Deep Learning, and Automation ProcessesDe la EverandArtificial Intelligence: Machine Learning, Deep Learning, and Automation ProcessesEvaluare: 5 din 5 stele5/5 (2)
- Atlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceDe la EverandAtlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceEvaluare: 5 din 5 stele5/5 (9)
- Mastering Drones - A Beginner's Guide To Start Making Money With DronesDe la EverandMastering Drones - A Beginner's Guide To Start Making Money With DronesEvaluare: 2.5 din 5 stele2.5/5 (3)
- Artificial You: AI and the Future of Your MindDe la EverandArtificial You: AI and the Future of Your MindEvaluare: 4 din 5 stele4/5 (3)
- Robotics: Designing the Mechanisms for Automated MachineryDe la EverandRobotics: Designing the Mechanisms for Automated MachineryEvaluare: 4.5 din 5 stele4.5/5 (8)
- Collection of Raspberry Pi ProjectsDe la EverandCollection of Raspberry Pi ProjectsEvaluare: 5 din 5 stele5/5 (1)
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsDe la EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsÎncă nu există evaluări