S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- 2600: The Hacker Quarterly (Volume 7, Number 1, Spring 1990)Document48 pagini2600: The Hacker Quarterly (Volume 7, Number 1, Spring 1990)Ranko KohimeÎncă nu există evaluări
- Android Flashing GuideDocument3 paginiAndroid Flashing GuideLynda NuryatiÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- 2G CMDDocument3 pagini2G CMDأبوعمر الفاروق عبدالرحمنÎncă nu există evaluări
- Convert solar power to AC with a grid-connected inverterDocument12 paginiConvert solar power to AC with a grid-connected invertersalem BEN MOUSSAÎncă nu există evaluări
- R-30iA KAREL Operation Manual Reference (B-83144EN-1 01) PDFDocument510 paginiR-30iA KAREL Operation Manual Reference (B-83144EN-1 01) PDFfrederic190pÎncă nu există evaluări
- SFDC Integration PDFDocument12 paginiSFDC Integration PDFkvamsee112100% (1)
- Survey of RtosDocument17 paginiSurvey of Rtoskvamsee112100% (1)
- Waveform Synthesis Using Laplace TransformDocument3 paginiWaveform Synthesis Using Laplace Transformkvamsee112Încă nu există evaluări
- Simulate transient response of RLC series circuitDocument4 paginiSimulate transient response of RLC series circuitkvamsee112Încă nu există evaluări
- Bes Lab Exp-6Document4 paginiBes Lab Exp-6kvamsee112Încă nu există evaluări
- Measurement of Active Power of Three Phase Circuit For Balanced and Unbalanced LoadDocument6 paginiMeasurement of Active Power of Three Phase Circuit For Balanced and Unbalanced Loadkvamsee112Încă nu există evaluări
- Tax Return Submission to CPC BangaloreDocument1 paginăTax Return Submission to CPC Bangalorekvamsee112Încă nu există evaluări
- Reg Pay Degree 020110Document16 paginiReg Pay Degree 020110SRINIVASA RAO GANTAÎncă nu există evaluări
- Technical Particulars For Drinking Water Coolers For RC Period (01-04-2016 To 31-03-2017)Document6 paginiTechnical Particulars For Drinking Water Coolers For RC Period (01-04-2016 To 31-03-2017)kvamsee112Încă nu există evaluări
- Street Light ControllerDocument2 paginiStreet Light Controllerkvamsee112Încă nu există evaluări
- Main Objective of The Course: Microprocessors and Interfacing DevicesDocument4 paginiMain Objective of The Course: Microprocessors and Interfacing Deviceskvamsee112Încă nu există evaluări
- Distance CounterDocument4 paginiDistance Counterkvamsee112100% (1)
- Ethernet Interface For Automation SystemsDocument12 paginiEthernet Interface For Automation Systemskvamsee112Încă nu există evaluări
- Fan On/off Control by LightDocument2 paginiFan On/off Control by Lightkvamsee112Încă nu există evaluări
- LaserDocument3 paginiLaserkvamsee112Încă nu există evaluări
- Flashing Beacon: Ashok K. DoctorDocument1 paginăFlashing Beacon: Ashok K. Doctorkvamsee112Încă nu există evaluări
- Fan On/off Control by LightDocument2 paginiFan On/off Control by Lightkvamsee112Încă nu există evaluări
- Linux ProgramDocument131 paginiLinux ProgramsivashaÎncă nu există evaluări
- Flashing BeaconDocument1 paginăFlashing Beaconkvamsee112Încă nu există evaluări
- Distance CounterDocument4 paginiDistance Counterkvamsee112100% (1)
- Cupboard Light: Raj K. GorkhaliDocument3 paginiCupboard Light: Raj K. Gorkhalikvamsee112Încă nu există evaluări
- Cupboard Light: Raj K. GorkhaliDocument3 paginiCupboard Light: Raj K. Gorkhalikvamsee112Încă nu există evaluări
- Ecs Master ManualDocument5 paginiEcs Master Manualkvamsee112Încă nu există evaluări
- C Plus Vs CDocument12 paginiC Plus Vs CGilvanLatreilleÎncă nu există evaluări
- Brushless DC Motor DriverDocument3 paginiBrushless DC Motor Driverkvamsee112Încă nu există evaluări
- LD2668T41982S54Document62 paginiLD2668T41982S54kvamsee112Încă nu există evaluări
- FT 33Document11 paginiFT 33Darshan RaghuÎncă nu există evaluări
- Introduction To LabVIEWDocument118 paginiIntroduction To LabVIEWHerman HerklotzÎncă nu există evaluări
- A Survey of Embedded Operating SystemDocument7 paginiA Survey of Embedded Operating Systemkvamsee112Încă nu există evaluări
- High-efficiency IGBT module for motor drive and UPS applicationsDocument4 paginiHigh-efficiency IGBT module for motor drive and UPS applicationsmouelhi karimÎncă nu există evaluări
- 3500/60 & /61 Temperature Monitors: Product DatasheetDocument12 pagini3500/60 & /61 Temperature Monitors: Product Datasheet666plc11Încă nu există evaluări
- AM Radio PublicDocument16 paginiAM Radio PublichidalgobÎncă nu există evaluări
- FMC 420 Level Measurement Operating InstructionsDocument16 paginiFMC 420 Level Measurement Operating InstructionsMarco Antonio Esquivel BarretoÎncă nu există evaluări
- DS3231Document6 paginiDS3231Doğu KayaÎncă nu există evaluări
- BJ - Cable Type - EN - TCD210042AA - CATALOG - WDocument2 paginiBJ - Cable Type - EN - TCD210042AA - CATALOG - WJORGE RODÎncă nu există evaluări
- MetroCount Data CollectionDocument30 paginiMetroCount Data CollectionPaco TrooperÎncă nu există evaluări
- Manual Sony Kp-53v100Document176 paginiManual Sony Kp-53v100Bebaa T Henderson Maslow BeltÎncă nu există evaluări
- Canadian-Solar Datasheet Inverter 3ph-12-20KW-ROW EN V1.1 May-2020-5Document2 paginiCanadian-Solar Datasheet Inverter 3ph-12-20KW-ROW EN V1.1 May-2020-5ENG. ALEXÎncă nu există evaluări
- Making The Perfect Connection: Protectron Electromech Pvt. LTDDocument33 paginiMaking The Perfect Connection: Protectron Electromech Pvt. LTDlingubhÎncă nu există evaluări
- AIS 038 Rev2F PDFDocument105 paginiAIS 038 Rev2F PDFRohit KumarÎncă nu există evaluări
- CARA PEMASANGAN RADIO KERETA DALAM 40 HURUFDocument6 paginiCARA PEMASANGAN RADIO KERETA DALAM 40 HURUFamir akmalÎncă nu există evaluări
- Philips Chassis Tpm6.1e LaDocument112 paginiPhilips Chassis Tpm6.1e LatarpinoÎncă nu există evaluări
- High Voltage EngineeringDocument38 paginiHigh Voltage EngineeringsjÎncă nu există evaluări
- Interbus Ibs CMD g4Document408 paginiInterbus Ibs CMD g4pinguinofiestero100% (1)
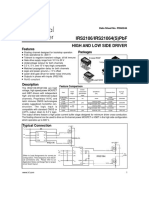
- IRS2106/IRS21064 high and low side driver datasheetDocument25 paginiIRS2106/IRS21064 high and low side driver datasheetmohamedÎncă nu există evaluări
- Sifang Csc-100eb v1.09 Line Protection Ied Manual 2022-12Document514 paginiSifang Csc-100eb v1.09 Line Protection Ied Manual 2022-12MarkusKunÎncă nu există evaluări
- Automator MarkingDocument16 paginiAutomator MarkingJose Angel RodriguezÎncă nu există evaluări
- Fix Problem 100% Disk UsageDocument23 paginiFix Problem 100% Disk UsageasydestroyerÎncă nu există evaluări
- Pioneer - Avic n1 - Avic x1r crt3423Document312 paginiPioneer - Avic n1 - Avic x1r crt3423psapwell100% (1)
- Ericsson Rbs 2216 PDFDocument2 paginiEricsson Rbs 2216 PDFMonique100% (1)
- Business Studeies Final Project 2019Document31 paginiBusiness Studeies Final Project 2019Pranav KumarÎncă nu există evaluări
- VSX-828-K Manual ENDocument71 paginiVSX-828-K Manual ENPiotr MichałowskiÎncă nu există evaluări
- UPG-07C/UPG-07 CW/UPG-07 DLCW Ultrasonic Thickness Gages: Quick Start GuideDocument8 paginiUPG-07C/UPG-07 CW/UPG-07 DLCW Ultrasonic Thickness Gages: Quick Start GuideSiles LimberdsÎncă nu există evaluări
- LVDT Bestech PDFDocument2 paginiLVDT Bestech PDFRajitha ShehanÎncă nu există evaluări