S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument21 paginiWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsChetan KotwalÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Tomorrow's Electric Power System:: Challenges & OpportunitiesDocument36 paginiTomorrow's Electric Power System:: Challenges & OpportunitiesChetan KotwalÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- Power System Security AnalysisDocument24 paginiPower System Security AnalysiscdkÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Load Sharing Regulation of A Grid-Connected Solar Photovoltaic PV System in Karbala CityDocument15 paginiLoad Sharing Regulation of A Grid-Connected Solar Photovoltaic PV System in Karbala CityChetan KotwalÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Ashraf 2014Document6 paginiAshraf 2014Chetan KotwalÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Lecture 02Document26 paginiLecture 02Chetan KotwalÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Hybrid Systems I: Explaining Decisions of Intelligent TechniquesDocument21 paginiHybrid Systems I: Explaining Decisions of Intelligent TechniquesChetan KotwalÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Energies 10 00523 PDFDocument22 paginiEnergies 10 00523 PDFChetan KotwalÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
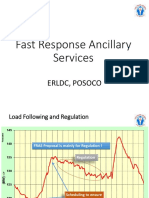
- Fast Response Ancillary Services: Erldc, PosocoDocument18 paginiFast Response Ancillary Services: Erldc, PosocoChetan KotwalÎncă nu există evaluări
- AC Power Quality and StandardsDocument13 paginiAC Power Quality and StandardsChetan KotwalÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Power Market Seminar on Challenges & Opportunities in Power Generation, Transmission & DistributionDocument65 paginiPower Market Seminar on Challenges & Opportunities in Power Generation, Transmission & DistributionChetan KotwalÎncă nu există evaluări
- Nonlinear Optimization Method Reduces Transmission NetworksDocument7 paginiNonlinear Optimization Method Reduces Transmission NetworksChetan KotwalÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Classifiers PDFDocument18 paginiClassifiers PDFChetan KotwalÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- I 01 Simulator Case EditorDocument76 paginiI 01 Simulator Case EditorMuhammad AbuzarÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- Yadav 2019Document27 paginiYadav 2019Chetan KotwalÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Design of The Pv-Upqc System For Long Voltage Interruption CompensationDocument17 paginiDesign of The Pv-Upqc System For Long Voltage Interruption CompensationChetan KotwalÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- 11 Major Power Grid BlackoutsDocument32 pagini11 Major Power Grid BlackoutsChetan KotwalÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- Flow: A For Stabilify: Continuation Power Tool Parametric Voltage Security AnalysisDocument6 paginiFlow: A For Stabilify: Continuation Power Tool Parametric Voltage Security AnalysisChetan KotwalÎncă nu există evaluări
- Optimizing With GaDocument62 paginiOptimizing With GaNatanael Acencio RijoÎncă nu există evaluări
- ObjectivesDocument15 paginiObjectivesChetan KotwalÎncă nu există evaluări
- Research On Steady State Voltage Stability of Power System With Distributed Static Series CompensatorDocument5 paginiResearch On Steady State Voltage Stability of Power System With Distributed Static Series CompensatorChetan KotwalÎncă nu există evaluări
- Application of REI Equivalent in Reactive Power Optimization Control in Regional Power GridDocument4 paginiApplication of REI Equivalent in Reactive Power Optimization Control in Regional Power GridChetan KotwalÎncă nu există evaluări
- Generators and Loads Contribution Factors Based CoDocument5 paginiGenerators and Loads Contribution Factors Based CoChetan KotwalÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- SVC Applications: Increase in Steady-State Power-Transfer CapacityDocument21 paginiSVC Applications: Increase in Steady-State Power-Transfer CapacityChetan KotwalÎncă nu există evaluări
- Sub Synchronous Resonance: Facts ControllersDocument17 paginiSub Synchronous Resonance: Facts ControllersChetan KotwalÎncă nu există evaluări
- Cahier Technique: Fuzzy LogicDocument32 paginiCahier Technique: Fuzzy LogicChetan KotwalÎncă nu există evaluări
- Ieee 9 Bus Technical NoteDocument5 paginiIeee 9 Bus Technical Note08mpe026Încă nu există evaluări
- 1.1 Proposal of Smart GridDocument6 pagini1.1 Proposal of Smart GridChetan KotwalÎncă nu există evaluări
- Series Compensation of Distribution and Subtransmission LinesDocument148 paginiSeries Compensation of Distribution and Subtransmission LinesChetan KotwalÎncă nu există evaluări
- Technical-Economic Analysis of Series Capacitor CompensationDocument54 paginiTechnical-Economic Analysis of Series Capacitor CompensationNaserian SalvyÎncă nu există evaluări
- 1 - PSA Lecture 1-2Document32 pagini1 - PSA Lecture 1-2Irtaza MazharÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Fuente Rectificadora Enatel PSX24 800W A 2400WDocument2 paginiFuente Rectificadora Enatel PSX24 800W A 2400WFranco Cortez100% (1)
- Power System Analysis Complex Engineering ProblemDocument13 paginiPower System Analysis Complex Engineering Problemmhrs11Încă nu există evaluări
- B767 LimitationsDocument5 paginiB767 LimitationsGustavo Avila Rodriguez100% (3)
- Short Circuit Contribution From PV Power Plants PDFDocument15 paginiShort Circuit Contribution From PV Power Plants PDFChalitha Kanchana100% (1)
- 04 - Wind Turbine Power, Energy and TorqueDocument54 pagini04 - Wind Turbine Power, Energy and Torquebiosbg100% (1)
- Principles and Design of Low Voltage SystemsDocument252 paginiPrinciples and Design of Low Voltage SystemsAxel Teoh100% (2)
- 1 3 PL300 Multifunction Relay PDFDocument20 pagini1 3 PL300 Multifunction Relay PDFAlfonso IbarraÎncă nu există evaluări
- Experiment # 01 ObjectiveDocument3 paginiExperiment # 01 ObjectiveAdeel Ahmad WattooÎncă nu există evaluări
- TutorialDocument149 paginiTutorialbrijal100% (1)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Assignment No 1 PDFDocument8 paginiAssignment No 1 PDFRaj KapurÎncă nu există evaluări
- Power System Model Validation: A Key to ReliabilityDocument53 paginiPower System Model Validation: A Key to ReliabilitypejmanÎncă nu există evaluări
- 5 - Preventive, Emergency and Restorative Control - 8 - SEMDocument56 pagini5 - Preventive, Emergency and Restorative Control - 8 - SEMSagar GadhiaÎncă nu există evaluări
- (ART) A Photovoltaic System Model For Matlab Simulink PDFDocument5 pagini(ART) A Photovoltaic System Model For Matlab Simulink PDFMustapha El MetouiÎncă nu există evaluări
- Analysis of Power System StabilityDocument31 paginiAnalysis of Power System Stabilitytarnedo1100% (1)
- Kohler Tt1584PIMDocument20 paginiKohler Tt1584PIMJohn ElyÎncă nu există evaluări
- Eps 1 Intro PDF FreeDocument12 paginiEps 1 Intro PDF FreeXedric AlvarezÎncă nu există evaluări
- Powerit MV Air Insulated Motor Control: Featuring Advance and Safegear TechnologyDocument72 paginiPowerit MV Air Insulated Motor Control: Featuring Advance and Safegear TechnologyRaja Bharath DonthiÎncă nu există evaluări
- DynamicDemand As On IEEE Site 1Document9 paginiDynamicDemand As On IEEE Site 1AlejandroHerreraGurideChileÎncă nu există evaluări
- Department of Defense Interface Standard Section 300B: Electric Power, Alternating CurrentDocument64 paginiDepartment of Defense Interface Standard Section 300B: Electric Power, Alternating CurrentDavoodÎncă nu există evaluări
- IOP Conference Series: Earth and Environmental Science - CVR Applied to Energy Savings Through AMIDocument9 paginiIOP Conference Series: Earth and Environmental Science - CVR Applied to Energy Savings Through AMIHarold De ChavezÎncă nu există evaluări
- 12 Volt Solar 2nd Ed Sample 1Document20 pagini12 Volt Solar 2nd Ed Sample 1Catipas100% (2)
- TP48200A-H15A1 Quick Installation Guide & TP48200A-H15A1 +8-+ + ++ - (V300R001 - 03)Document2 paginiTP48200A-H15A1 Quick Installation Guide & TP48200A-H15A1 +8-+ + ++ - (V300R001 - 03)bbpncb100% (1)
- Power System Security: Viren B. PandyaDocument23 paginiPower System Security: Viren B. PandyavirenpandyaÎncă nu există evaluări
- Instruction BookDocument122 paginiInstruction BookJulian RuedaÎncă nu există evaluări
- Cispr18-2 (Ed2 0) enDocument76 paginiCispr18-2 (Ed2 0) enSajjad PirzadaÎncă nu există evaluări
- NGR PDFDocument4 paginiNGR PDFFerly AsriÎncă nu există evaluări
- 08 Backup Power Part 4 Book Typeset 1Document63 pagini08 Backup Power Part 4 Book Typeset 1mgharrier100% (1)
- Transient Stability AnalysisDocument6 paginiTransient Stability AnalysisAmbachew A.0% (1)
- The Grid: The Fraying Wires Between Americans and Our Energy FutureDe la EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureEvaluare: 3.5 din 5 stele3.5/5 (48)
- Industrial Piping and Equipment Estimating ManualDe la EverandIndustrial Piping and Equipment Estimating ManualEvaluare: 5 din 5 stele5/5 (7)
- Introduction to Power System ProtectionDe la EverandIntroduction to Power System ProtectionEvaluare: 5 din 5 stele5/5 (1)
- Renewable Energy: A Very Short IntroductionDe la EverandRenewable Energy: A Very Short IntroductionEvaluare: 4.5 din 5 stele4.5/5 (12)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesDe la EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesEvaluare: 4.5 din 5 stele4.5/5 (21)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialDe la EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialÎncă nu există evaluări