S-ar putea să vă placă și
- 1-Hydraulics TanksDocument5 pagini1-Hydraulics Tanksmohammed rafatÎncă nu există evaluări
- Groundhook Control of Semi-Active Suspension For Heavy VehicleDocument7 paginiGroundhook Control of Semi-Active Suspension For Heavy VehicleAhmadMoaazÎncă nu există evaluări
- Lect 1Document18 paginiLect 1AhmadMoaazÎncă nu există evaluări
- Gauss Elimination MethodDocument16 paginiGauss Elimination MethodAhmadMoaazÎncă nu există evaluări
- Lect 2Document18 paginiLect 2AhmadMoaazÎncă nu există evaluări
- Ordinary Differential Equation - Lecutre 2 - D.redaDocument23 paginiOrdinary Differential Equation - Lecutre 2 - D.redaAhmadMoaazÎncă nu există evaluări
- Vehicle Mathematical Model For The Study PDFDocument11 paginiVehicle Mathematical Model For The Study PDFAhmadMoaazÎncă nu există evaluări
- TSFS02 - Vehicle Dynamics and Control Computer Exercise 3: Electronic Stability Control (ESP)Document6 paginiTSFS02 - Vehicle Dynamics and Control Computer Exercise 3: Electronic Stability Control (ESP)AhmadMoaazÎncă nu există evaluări
- Real-Time Non-Linear Vehicle Dynamics Preview Model: Bernard LinströmDocument19 paginiReal-Time Non-Linear Vehicle Dynamics Preview Model: Bernard LinströmAhmadMoaazÎncă nu există evaluări
- Linear Electromagnetic Actuators For A VDocument9 paginiLinear Electromagnetic Actuators For A VAhmadMoaazÎncă nu există evaluări
- Assignment 5 (Chapter 4 Steady-State Cornering)Document4 paginiAssignment 5 (Chapter 4 Steady-State Cornering)AhmadMoaazÎncă nu există evaluări
- Force & Acceleration Spectral Test Levels Calculator: 9.0 Lbs Test Article Mass 1.0Document8 paginiForce & Acceleration Spectral Test Levels Calculator: 9.0 Lbs Test Article Mass 1.0AhmadMoaazÎncă nu există evaluări
- Assignment 7 (Anti-Lock Braking System)Document5 paginiAssignment 7 (Anti-Lock Braking System)AhmadMoaazÎncă nu există evaluări
- Antilock Braking System Using Fuzzy LogicDocument8 paginiAntilock Braking System Using Fuzzy LogicAhmadMoaazÎncă nu există evaluări
- Fourier Series ADocument25 paginiFourier Series AAhmadMoaazÎncă nu există evaluări
- Fuzzy Control of Active Suspension System: Senthilkumar Palanisamy, Sivakumar KaruppanDocument8 paginiFuzzy Control of Active Suspension System: Senthilkumar Palanisamy, Sivakumar KaruppanAhmadMoaazÎncă nu există evaluări
- Chapter2a SmithDocument19 paginiChapter2a SmithGilang DeathMetal SquadÎncă nu există evaluări
- Excel Solver Example: "Finding A Local Minimum Using The Excel Solver" - Jon WittwerDocument2 paginiExcel Solver Example: "Finding A Local Minimum Using The Excel Solver" - Jon WittwerAhmadMoaazÎncă nu există evaluări
- Sample PDFDocument28 paginiSample PDFKumaraguru SÎncă nu există evaluări
- Template For Solving Simultaneous Non-Linear EquationsDocument1 paginăTemplate For Solving Simultaneous Non-Linear EquationsAhmadMoaazÎncă nu există evaluări
- All The Excel File Was Prepared by Dr. Harimi Djamila Is A Senior Lecturer at The Universiti Malaysia SabahDocument26 paginiAll The Excel File Was Prepared by Dr. Harimi Djamila Is A Senior Lecturer at The Universiti Malaysia SabahAhmadMoaazÎncă nu există evaluări
- Fon Simult1Document14 paginiFon Simult1sharath1199Încă nu există evaluări
- Fix PT IterationDocument6 paginiFix PT IterationAhmadMoaazÎncă nu există evaluări
- Matrices Resources On MEI Online Resources: Ocr Fp1 Mei Fp1 Aqa Fp1Document2 paginiMatrices Resources On MEI Online Resources: Ocr Fp1 Mei Fp1 Aqa Fp1AhmadMoaazÎncă nu există evaluări
- The Bisection Algorithm: Either No Solutions or Multiple Solutions Between Left and Right BoundsDocument1 paginăThe Bisection Algorithm: Either No Solutions or Multiple Solutions Between Left and Right BoundsAhmadMoaazÎncă nu există evaluări
- MatrixSolver For ExcelDocument8 paginiMatrixSolver For ExcelownlinkscribdÎncă nu există evaluări
- 4-Hydraulic Fluids PDFDocument13 pagini4-Hydraulic Fluids PDFMahmmod Al-QawasmehÎncă nu există evaluări
- 6th Central Pay Commission Salary CalculatorDocument15 pagini6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Lesson 3: Hydraulic Pumps and MotorsDocument32 paginiLesson 3: Hydraulic Pumps and MotorsAhmadMoaazÎncă nu există evaluări
- The Bisection Algorithm: Either No Solutions or Multiple Solutions Between Left and Right BoundsDocument1 paginăThe Bisection Algorithm: Either No Solutions or Multiple Solutions Between Left and Right BoundsAhmadMoaazÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Tata NanoDocument25 paginiTata Nanop01p100% (1)
- Saudi Methanol Company (Ar-Razi) : Job Safety AnalysisDocument7 paginiSaudi Methanol Company (Ar-Razi) : Job Safety AnalysisAnonymous voA5Tb0Încă nu există evaluări
- 1Document2 pagini1TrầnLanÎncă nu există evaluări
- PM 50 Service ManualDocument60 paginiPM 50 Service ManualLeoni AnjosÎncă nu există evaluări
- Reaction PaperDocument3 paginiReaction PaperLois DolorÎncă nu există evaluări
- Measuring Road Roughness by Static Level Method: Standard Test Method ForDocument6 paginiMeasuring Road Roughness by Static Level Method: Standard Test Method ForDannyChaconÎncă nu există evaluări
- ManualDocument50 paginiManualspacejung50% (2)
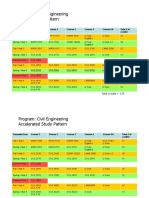
- HKUST 4Y Curriculum Diagram CIVLDocument4 paginiHKUST 4Y Curriculum Diagram CIVLfrevÎncă nu există evaluări
- Overlay Control PlansDocument1 paginăOverlay Control PlansSTS-SPARK GAMINGÎncă nu există evaluări
- Institutions and StrategyDocument28 paginiInstitutions and StrategyFatin Fatin Atiqah100% (1)
- Abas Drug Study Nicu PDFDocument4 paginiAbas Drug Study Nicu PDFAlexander Miguel M. AbasÎncă nu există evaluări
- Addendum ESIA Oct 2019Document246 paginiAddendum ESIA Oct 2019melkamuÎncă nu există evaluări
- Porter's 5-Force Analysis of ToyotaDocument9 paginiPorter's 5-Force Analysis of ToyotaBiju MathewsÎncă nu există evaluări
- Operating Instructions: Rotary Lobe PumpDocument77 paginiOperating Instructions: Rotary Lobe PumpRuslan SlusarÎncă nu există evaluări
- Tenses English Grammar PresentationDocument14 paginiTenses English Grammar PresentationMaz Gedi60% (5)
- An Analysis of Students' Error in Using Possesive Adjective in Their Online Writing TasksDocument19 paginiAn Analysis of Students' Error in Using Possesive Adjective in Their Online Writing TasksKartika Dwi NurandaniÎncă nu există evaluări
- Answer: C: Exam Name: Exam Type: Exam Code: Total QuestionsDocument26 paginiAnswer: C: Exam Name: Exam Type: Exam Code: Total QuestionsMohammed S.GoudaÎncă nu există evaluări
- Study Notes - Google Project Management Professional CertificateDocument4 paginiStudy Notes - Google Project Management Professional CertificateSWAPNIL100% (1)
- Subeeka Akbar Advance NutritionDocument11 paginiSubeeka Akbar Advance NutritionSubeeka AkbarÎncă nu există evaluări
- Citibank CaseDocument6 paginiCitibank CaseLalatendu Das0% (1)
- Actron Vismin ReportDocument19 paginiActron Vismin ReportSirhc OyagÎncă nu există evaluări
- Electronic Fundamentals: B) The Active ElementDocument45 paginiElectronic Fundamentals: B) The Active ElementZbor ZborÎncă nu există evaluări
- FIREBASE Edited PresentationDocument12 paginiFIREBASE Edited PresentationNiraj MirgalÎncă nu există evaluări
- Financial Institutions Markets and ServicesDocument2 paginiFinancial Institutions Markets and ServicesPavneet Kaur Bhatia100% (1)
- Stratum CorneumDocument4 paginiStratum CorneumMuh Firdaus Ar-RappanyÎncă nu există evaluări
- Acute Suppurative Otitis MediaDocument41 paginiAcute Suppurative Otitis Mediarani suwadjiÎncă nu există evaluări
- Leather PuppetryDocument8 paginiLeather PuppetryAnushree BhattacharyaÎncă nu există evaluări
- Communication Skill - Time ManagementDocument18 paginiCommunication Skill - Time ManagementChấn NguyễnÎncă nu există evaluări
- Concise Selina Solutions Class 9 Maths Chapter 15 Construction of PolygonsDocument31 paginiConcise Selina Solutions Class 9 Maths Chapter 15 Construction of Polygonsbhaskar51178Încă nu există evaluări
- BSRM Ultima BrochureDocument2 paginiBSRM Ultima BrochuresaifuzzamanÎncă nu există evaluări