S-ar putea să vă placă și
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Bhartiya Pavithra Punya KshetraluDocument81 paginiBhartiya Pavithra Punya KshetraluMaroju Santosh KiranÎncă nu există evaluări
- Exercise PDFDocument17 paginiExercise PDFMaroju Santosh KiranÎncă nu există evaluări
- CH 13 PDFDocument4 paginiCH 13 PDFMaroju Santosh KiranÎncă nu există evaluări
- Credits Periods Exam Hrs. Exam Marks Total Marks Theory Tutorial LabDocument6 paginiCredits Periods Exam Hrs. Exam Marks Total Marks Theory Tutorial LabMaroju Santosh KiranÎncă nu există evaluări
- 2 PDFDocument324 pagini2 PDFMaroju Santosh KiranÎncă nu există evaluări
- 1 s2.0 S1876610213017268 Main PDFDocument10 pagini1 s2.0 S1876610213017268 Main PDFMaroju Santosh KiranÎncă nu există evaluări
- Electronic Instrumentation H S KalsiDocument652 paginiElectronic Instrumentation H S KalsiAjayChandrakar60% (10)
- Model-Based Predictive Direct Power Control of Doubly Fed Induction GeneratorsDocument11 paginiModel-Based Predictive Direct Power Control of Doubly Fed Induction GeneratorsMaroju Santosh KiranÎncă nu există evaluări
- 6448 3748 PDFDocument388 pagini6448 3748 PDFMaroju Santosh KiranÎncă nu există evaluări
- Sliding Mode Control For Second Order System PDFDocument9 paginiSliding Mode Control For Second Order System PDFMaroju Santosh KiranÎncă nu există evaluări
- 7 PDFDocument9 pagini7 PDFMaroju Santosh KiranÎncă nu există evaluări
- Rotor Voltage Dynamics in The Doubly Fed Induction Generator During Grid FaultsDocument13 paginiRotor Voltage Dynamics in The Doubly Fed Induction Generator During Grid FaultsMaroju Santosh KiranÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Introduction To Arduino PDFDocument13 paginiIntroduction To Arduino PDFAbhinav ChoudharyÎncă nu există evaluări
- ADC Eco Dry ES-50 COIN SpecificationsDocument2 paginiADC Eco Dry ES-50 COIN Specificationsmairimsp2003Încă nu există evaluări
- 5parameter ListDocument86 pagini5parameter ListIsradani MjÎncă nu există evaluări
- Tripping Report of Power PlantDocument3 paginiTripping Report of Power Plantmanohar kumarÎncă nu există evaluări
- 05-Fault Code List-WabcoDocument11 pagini05-Fault Code List-WabcoRaul GTÎncă nu există evaluări
- PRO Engines Instruction Manual ENGLISH V1 8 08 2019Document72 paginiPRO Engines Instruction Manual ENGLISH V1 8 08 2019jay biljanÎncă nu există evaluări
- GPSANT: GPS Antenna/Converter Unit: Key FeaturesDocument3 paginiGPSANT: GPS Antenna/Converter Unit: Key FeaturesShahrukh SaleemÎncă nu există evaluări
- Battery Sizing NicdDocument4 paginiBattery Sizing NicdMandip Pokharel0% (1)
- Module 3Document29 paginiModule 3Zaid AliÎncă nu există evaluări
- IRC5Document549 paginiIRC5HugoRamosÎncă nu există evaluări
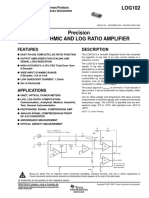
- AmpLog Burr BrownDocument18 paginiAmpLog Burr Brownnapoleon_velasc3617Încă nu există evaluări
- TFM 94 SeriesDocument2 paginiTFM 94 Seriesluat1983Încă nu există evaluări
- JMUX Reference Manual Issue 4.0Document99 paginiJMUX Reference Manual Issue 4.0gradeli100% (2)
- UNIS OEM en 07-01Document8 paginiUNIS OEM en 07-01Razvan SasuÎncă nu există evaluări
- DRS2663B Amana Service ManualDocument72 paginiDRS2663B Amana Service ManualJohn TrippÎncă nu există evaluări
- NORDAC Compact Frequency Inverter: Operating InstructionsDocument38 paginiNORDAC Compact Frequency Inverter: Operating InstructionsNejra DedajićÎncă nu există evaluări
- Cat Switchgear - Eaton Consulting Application GuideDocument58 paginiCat Switchgear - Eaton Consulting Application GuideFélix VelascoÎncă nu există evaluări
- Voice Controlled SwitchDocument3 paginiVoice Controlled SwitchDarshan ThammaiahÎncă nu există evaluări
- View Topic - New VT Plus Series FX Loop - ValvetronixDocument5 paginiView Topic - New VT Plus Series FX Loop - ValvetronixStaticÎncă nu există evaluări
- Chapter - 1: Ece Department, AcoeDocument55 paginiChapter - 1: Ece Department, AcoeSana SriRamyaÎncă nu există evaluări
- Effect of Shading On Photovoltaic Cell: Ekpenyong, E.E and Anyasi, F.IDocument6 paginiEffect of Shading On Photovoltaic Cell: Ekpenyong, E.E and Anyasi, F.IM VetriselviÎncă nu există evaluări
- Nibe GV HR110 Pliant 30 09 2013 enDocument4 paginiNibe GV HR110 Pliant 30 09 2013 envaliÎncă nu există evaluări
- Eee1001 Basic-Electrical-And-Electronics-Engineering Eth 1.0 37 Eee1001 PDFDocument2 paginiEee1001 Basic-Electrical-And-Electronics-Engineering Eth 1.0 37 Eee1001 PDFboomaÎncă nu există evaluări
- Transistor - Wikipedia, The Free EncyclopediaDocument16 paginiTransistor - Wikipedia, The Free EncyclopediaAlwyzz Happie RaamzzÎncă nu există evaluări
- LMV5 Tech Inst LV5-1000 Complete IndexedDocument374 paginiLMV5 Tech Inst LV5-1000 Complete Indexedjorge_people891931Încă nu există evaluări
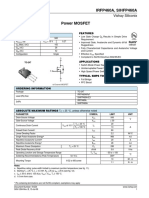
- Vishay IRFP460APBF Datasheet PDFDocument8 paginiVishay IRFP460APBF Datasheet PDFkamel keddarÎncă nu există evaluări
- Mil HDBK 217F CN1Document37 paginiMil HDBK 217F CN1Bobby ChippingÎncă nu există evaluări
- NVIS 2040-80 20antennaDocument7 paginiNVIS 2040-80 20antennaChris VinceÎncă nu există evaluări
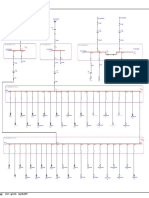
- One-Line Diagram - OLV1 (Short-Circuit Analysis)Document20 paginiOne-Line Diagram - OLV1 (Short-Circuit Analysis)Yogesh MittalÎncă nu există evaluări
- Analog DAN ModuelsDocument20 paginiAnalog DAN Moduelskzb003Încă nu există evaluări