S-ar putea să vă placă și
- Desmontaje Del Tanque de Combustible Great Wall Safe - DotDocument5 paginiDesmontaje Del Tanque de Combustible Great Wall Safe - DotGENRRY14Încă nu există evaluări
- Electricidad Básica - Taller de GeneradoresDocument5 paginiElectricidad Básica - Taller de GeneradoresJUAN PABLO LEGARDA VALENCIAÎncă nu există evaluări
- Selección Del Motor EléctricoDocument8 paginiSelección Del Motor Eléctricobigscorpion1991Încă nu există evaluări
- Informe BielaDocument5 paginiInforme BielaJulian RodriguezÎncă nu există evaluări
- Uno de Los Usos Más Comunes de Los Diodos Rectificadores en Electrónica Es Convertir La Corriente Alterna de Un Hogar en Corriente Continua Que Se Puede Utilizar Como Una Alternativa A Las BateríasDocument5 paginiUno de Los Usos Más Comunes de Los Diodos Rectificadores en Electrónica Es Convertir La Corriente Alterna de Un Hogar en Corriente Continua Que Se Puede Utilizar Como Una Alternativa A Las BateríasGusSaraviaÎncă nu există evaluări
- Alternador TrifasicoDocument11 paginiAlternador TrifasicoOmar Francisco Lora100% (3)
- Informe ME Motor de Induccion TrifasicoDocument19 paginiInforme ME Motor de Induccion TrifasicoSimcad sildeskÎncă nu există evaluări
- Amperimetro PDFDocument1 paginăAmperimetro PDFMemoGEÎncă nu există evaluări
- Informe Proyecto GSM Fiiiinalll TerminadoDocument22 paginiInforme Proyecto GSM Fiiiinalll TerminadoCesar du HastÎncă nu există evaluări
- Rebobinado de Motores Trifasicos PDFDocument153 paginiRebobinado de Motores Trifasicos PDFYves WRÎncă nu există evaluări
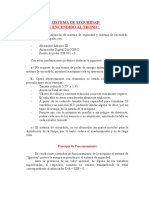
- Sistema Altronic de Seguridad y EncendidoDocument7 paginiSistema Altronic de Seguridad y EncendidoRodrigo SuperlogicoÎncă nu există evaluări
- Alternador Leroy Sommer 1326a EsDocument16 paginiAlternador Leroy Sommer 1326a EsMarco Velarde100% (1)
- Evaluación ENE TCI202-completaDocument8 paginiEvaluación ENE TCI202-completaLeonardo Gutierrez100% (1)
- FERREYROSDocument38 paginiFERREYROSoscar chambi100% (1)
- Construccion y Tipos de Devanados en El Generador de CDDocument10 paginiConstruccion y Tipos de Devanados en El Generador de CDTersy Comi GonzalezÎncă nu există evaluări
- Motores Sincronos IIDocument20 paginiMotores Sincronos IIDavid SáenzÎncă nu există evaluări
- Lab Oratorio de Maquinas Electric As UNEXPODocument90 paginiLab Oratorio de Maquinas Electric As UNEXPOyerutÎncă nu există evaluări
- Elementos de Un Comando EléctricoDocument11 paginiElementos de Un Comando EléctricoPedro EspinozaÎncă nu există evaluări
- Silabo de Instalacion de Maquinas Electricas 2021Document3 paginiSilabo de Instalacion de Maquinas Electricas 2021Jun LeeÎncă nu există evaluări
- MecanicaDocument12 paginiMecanicapedrogp100% (8)
- Inspeccion Alternador PrincipalDocument8 paginiInspeccion Alternador PrincipalMarcelo Mamani ValerianoÎncă nu există evaluări
- Yaskawa Varispeed E7 Manual Espanol Tos s616!56!1Document290 paginiYaskawa Varispeed E7 Manual Espanol Tos s616!56!1TelchoÎncă nu există evaluări
- Curso ElectrovalvulasDocument18 paginiCurso Electrovalvulasleo_estalaÎncă nu există evaluări
- Arranque Con AutotransformadorDocument25 paginiArranque Con AutotransformadorBryan AndresÎncă nu există evaluări
- Maquinas Prueba Corriente ContinuaDocument20 paginiMaquinas Prueba Corriente ContinuaVALERIA NICOLE TORRES TERANÎncă nu există evaluări
- Calcular La Sección de Cable Según Consumo para Instalaciones A 12v en VehículosDocument12 paginiCalcular La Sección de Cable Según Consumo para Instalaciones A 12v en VehículosCarlosLopezÎncă nu există evaluări
- Sistema de Arranque 2Document8 paginiSistema de Arranque 2Marriaga AndyÎncă nu există evaluări
- Campos Magnéticos GiratoriosDocument7 paginiCampos Magnéticos GiratoriosCristian GuangasigÎncă nu există evaluări
- Generador de Corriente ContinuaDocument13 paginiGenerador de Corriente Continuaaledrop1100% (1)
- Manual de Instrucciones: Bombas de Vacío Rotativas Speedivac 2Document34 paginiManual de Instrucciones: Bombas de Vacío Rotativas Speedivac 2ahalonsoÎncă nu există evaluări
- Montaje y AlineaciónDocument9 paginiMontaje y AlineaciónRangel VelasquezÎncă nu există evaluări
- Amplificador Operacional y TiristoresDocument44 paginiAmplificador Operacional y TiristoresJaime Arellano Huerta0% (1)
- Esquema Eléctrico de VAZDocument64 paginiEsquema Eléctrico de VAZGonzalo Pizarro CárdenasÎncă nu există evaluări
- Motor Trifasico de Polos AlternosDocument6 paginiMotor Trifasico de Polos AlternosKevin Jesus Suarez Arevalo0% (1)
- 03 Leyes de Hidraulica y NeumaticaDocument23 pagini03 Leyes de Hidraulica y NeumaticaFernando Fernandez QuispeÎncă nu există evaluări
- Terex TL120Document2 paginiTerex TL120ForomaquinasÎncă nu există evaluări
- Generador CCDocument3 paginiGenerador CCLuis SilbaÎncă nu există evaluări
- Tutorial MultimetroDocument6 paginiTutorial MultimetroHenry VenturaÎncă nu există evaluări
- Serie 1000 Alternador LeroyDocument20 paginiSerie 1000 Alternador LeroyMatias CortesÎncă nu există evaluări
- Alternador Constitucion FuncionamientoDocument21 paginiAlternador Constitucion FuncionamientoElias Muñoz100% (5)
- Clase 3 y 4. Comandos Eléctricos.Document36 paginiClase 3 y 4. Comandos Eléctricos.RichardÎncă nu există evaluări
- Envejecimiento Papel PDFDocument136 paginiEnvejecimiento Papel PDFAnderson Garcia VasquezÎncă nu există evaluări
- Guia de Motores CaterpillarDocument4 paginiGuia de Motores CaterpillarRubén Carcausto QuispeÎncă nu există evaluări
- Hoja de Trabajo SENSORES TEMPERATURA-ALEXEIDocument6 paginiHoja de Trabajo SENSORES TEMPERATURA-ALEXEIAlexei MoralesÎncă nu există evaluări
- BRCDocument36 paginiBRCCarlos QuispeÎncă nu există evaluări
- Noe 771Document300 paginiNoe 771Pablo Antonio Lopez AcuñaÎncă nu există evaluări
- Frenado de Un Motor DCDocument14 paginiFrenado de Un Motor DCFrancisco RamirezÎncă nu există evaluări
- Manual Atr WegDocument6 paginiManual Atr WegJaime Hernandez LemusÎncă nu există evaluări
- Ponente Del Sistema de Control ElectronicoDocument2 paginiPonente Del Sistema de Control ElectronicoEdward Pardavé BerrocalÎncă nu există evaluări
- Marco TeoricoDocument6 paginiMarco TeoricoGIAN PIERO RODRIGUEZ SANTOSÎncă nu există evaluări
- Sistemas Electronicos para Control de MotoresDocument3 paginiSistemas Electronicos para Control de MotoresJulioÎncă nu există evaluări
- ALUMNO GUÍA N°9 Ensayo de MáquinasDocument5 paginiALUMNO GUÍA N°9 Ensayo de MáquinasGuillermoRifoReyes0% (1)
- Unidad 1 Maquinas ElectricasDocument46 paginiUnidad 1 Maquinas ElectricasPedro Muñoz CórdovaÎncă nu există evaluări
- ClaseDocument32 paginiClaseMarko QuilahuequeÎncă nu există evaluări
- Practica de Laboratorio #10Document4 paginiPractica de Laboratorio #10J Deyvid FloresÎncă nu există evaluări
- Unidades Maquinas Electricas IIDocument25 paginiUnidades Maquinas Electricas IICarlos AmaroÎncă nu există evaluări
- Actividad 4 Motor ElectricoDocument8 paginiActividad 4 Motor ElectricoKatiko UzumakiÎncă nu există evaluări
- Laboratorio de Fisica Iii - Ley de FaradayDocument10 paginiLaboratorio de Fisica Iii - Ley de FaradayGustavoChecallaApaza100% (2)
- Informe de Laboratorio Práctica - 1Document12 paginiInforme de Laboratorio Práctica - 1OSCAR VINICIO CHUQUITARCO LAGLAÎncă nu există evaluări
- Adquisición de Datos y Procesamiento de Señales (Acelerómetro)Document0 paginiAdquisición de Datos y Procesamiento de Señales (Acelerómetro)Daniel MenesesÎncă nu există evaluări
- Dispensador de Bebidas Por MesaDocument27 paginiDispensador de Bebidas Por MesaEzequiel DiazÎncă nu există evaluări
- Aplicaciones Moviles y Servicios Web Con LabVIEWDocument30 paginiAplicaciones Moviles y Servicios Web Con LabVIEWEzequiel DiazÎncă nu există evaluări
- Practica2 MicrocontroladoresDocument11 paginiPractica2 MicrocontroladoresEzequiel DiazÎncă nu există evaluări
- 46679584-Practicas-LabView PidDocument32 pagini46679584-Practicas-LabView PidCesar GraciaÎncă nu există evaluări
- Práctica 2. Almacenamiento en ArchivosDocument7 paginiPráctica 2. Almacenamiento en ArchivosEzequiel DiazÎncă nu există evaluări
- Práctica 4. Construcción de Instrumentos Virtuales para El Control de Variables Físicas PDFDocument4 paginiPráctica 4. Construcción de Instrumentos Virtuales para El Control de Variables Físicas PDFEzequiel DiazÎncă nu există evaluări
- Administración de Proyectos Estudio de MercadoDocument158 paginiAdministración de Proyectos Estudio de MercadoEzequiel DiazÎncă nu există evaluări
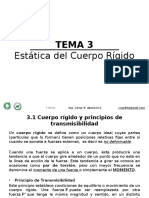
- Tema 3 - Estatica Del Cuerpo RigidoDocument22 paginiTema 3 - Estatica Del Cuerpo RigidoDaniel Garcia0% (1)
- Clase 6 Sem 4 - HalógenosDocument13 paginiClase 6 Sem 4 - HalógenosDel1al9Încă nu există evaluări
- Calderón - Circuitos ElectronicosDocument202 paginiCalderón - Circuitos ElectronicosWilson Acero100% (2)
- FotónDocument18 paginiFotónveronica OrtezÎncă nu există evaluări
- Guias F-Q IIDocument65 paginiGuias F-Q IINazareth LucianaÎncă nu există evaluări
- Capítulo 04 Química Nuclear - Verano 2021Document1 paginăCapítulo 04 Química Nuclear - Verano 2021Teofilo Donaires FloresÎncă nu există evaluări
- Osmosis Velocidad CalorDocument7 paginiOsmosis Velocidad CalorNathy Paco Castillo0% (1)
- 08 Voladura de RocasDocument43 pagini08 Voladura de RocasAldo Paul Quintana Villa100% (1)
- Semana 6 Fuerza EltaDocument4 paginiSemana 6 Fuerza EltaKenneth FmmÎncă nu există evaluări
- Quimica Periodo1Document11 paginiQuimica Periodo1soporte8351Încă nu există evaluări
- Exp. LosasDocument37 paginiExp. LosasGerry72Încă nu există evaluări
- Evaporadores APADocument20 paginiEvaporadores APAosiris del carmen pacheco carranzaÎncă nu există evaluări
- 2-Que Fabrica Una BloqueraDocument6 pagini2-Que Fabrica Una BloqueraKarim ChiedÎncă nu există evaluări
- Hidrostatica 1 2003Document3 paginiHidrostatica 1 2003Francone Martínez de PameleineÎncă nu există evaluări
- Informe ElectrónicoDocument24 paginiInforme ElectrónicoDayan De la RosaÎncă nu există evaluări
- Tubos Pared DelgadaDocument18 paginiTubos Pared DelgadaMariferm5Încă nu există evaluări
- 1 Practica Vectores 2019Document4 pagini1 Practica Vectores 2019Fredy AvendañoÎncă nu există evaluări
- Anexo1 - Plantilla - Entrega - Tarea 1Document26 paginiAnexo1 - Plantilla - Entrega - Tarea 1Mariana PinedaÎncă nu există evaluări
- Programa Casa Segura TerminadoDocument12 paginiPrograma Casa Segura TerminadoGuillermo Marquez MendezÎncă nu există evaluări
- Modulo Quimica 1Document32 paginiModulo Quimica 1Sergio GarzónÎncă nu există evaluări
- GiróscopoDocument9 paginiGiróscopojhony perez castilloÎncă nu există evaluări
- Teoría Electromagnética Campo Eléctrico (200901)Document2 paginiTeoría Electromagnética Campo Eléctrico (200901)tavorramosÎncă nu există evaluări
- Practica #3 Alcalinos TerreosDocument3 paginiPractica #3 Alcalinos TerreosKath MedaÎncă nu există evaluări
- Equilibrio QuímicoDocument27 paginiEquilibrio QuímicoDenizithaÎncă nu există evaluări
- Trabajo 01Document5 paginiTrabajo 01mahz159335% (17)
- Libro de Efecto Casimir 2Document52 paginiLibro de Efecto Casimir 2nothingelsematter37Încă nu există evaluări
- Manual de Lab OratorioDocument144 paginiManual de Lab OratorioJenryAvalosÎncă nu există evaluări
- Criterio de RocasDocument49 paginiCriterio de RocasIlianaÎncă nu există evaluări
- Laboratorio 1 Maquinas 2Document5 paginiLaboratorio 1 Maquinas 2Esteban RaúlÎncă nu există evaluări
- Obra TriloríaDocument10 paginiObra TriloríagabyÎncă nu există evaluări