S-ar putea să vă placă și
- Control de PosicionDocument17 paginiControl de PosicionDaniel Rocha UgaldeÎncă nu există evaluări
- Control de Motor de Pasos Con MicrocontroladorDocument3 paginiControl de Motor de Pasos Con MicrocontroladorCarlo PalacioÎncă nu există evaluări
- Informe 2 AccionamientoDocument18 paginiInforme 2 AccionamientoAlex Melo CarrascoÎncă nu există evaluări
- Calculo de Conductores Sistema FotovoltaicoDocument9 paginiCalculo de Conductores Sistema Fotovoltaicoricardo rodriguezÎncă nu există evaluări
- Electronica Digital Proyecto FinalDocument7 paginiElectronica Digital Proyecto FinalDavid MenaÎncă nu există evaluări
- Prot y Subest 1a ParteDocument2 paginiProt y Subest 1a PartecepilloÎncă nu există evaluări
- Labo 4 Filtros DigitalesDocument13 paginiLabo 4 Filtros DigitaleswilliamÎncă nu există evaluări
- 2° Laboratorio (Transmisor de Temperatura)Document8 pagini2° Laboratorio (Transmisor de Temperatura)Esteban GonzalezÎncă nu există evaluări
- Medium Voltage Switchgear PDFDocument54 paginiMedium Voltage Switchgear PDFalgotr100% (1)
- Guia Ejercicios 6Document3 paginiGuia Ejercicios 6Jorge Lizama0% (2)
- Practica 1 de Electronica 2Document3 paginiPractica 1 de Electronica 2sebastianÎncă nu există evaluări
- Manual LABORATORIOS Laboratorio Control Electrico - I 2021Document43 paginiManual LABORATORIOS Laboratorio Control Electrico - I 2021Rashell AguilarÎncă nu există evaluări
- Laboratorio #5 Motor DCDocument55 paginiLaboratorio #5 Motor DCMartin Santiago Guerrero CarranzaÎncă nu există evaluări
- Practica 5 MaquinasDocument3 paginiPractica 5 MaquinashybetoÎncă nu există evaluări
- Tecnologias de La Automatizacion Por Logica CableadaDocument11 paginiTecnologias de La Automatizacion Por Logica CableadaeduardoguidoÎncă nu există evaluări
- Servo MotorDocument6 paginiServo MotorNatalia Gil ViloriaÎncă nu există evaluări
- Inversores SQW PDFDocument24 paginiInversores SQW PDFPPAPARICIO100% (1)
- Trabajo Autónomo 5 - Fuentes de Alimentación PDFDocument8 paginiTrabajo Autónomo 5 - Fuentes de Alimentación PDFraquel arevaloÎncă nu există evaluări
- Diseño VHDL (Organizacion Y Arquitectura)Document57 paginiDiseño VHDL (Organizacion Y Arquitectura)ENIC-AITCG0% (1)
- Circuitería Del Sistema MínimoDocument78 paginiCircuitería Del Sistema MínimoKevin Hernandez Cruz67% (3)
- Comparadores en MicrowinDocument10 paginiComparadores en MicrowinJorge AlvaradoÎncă nu există evaluări
- Proyecto Taller de InvestigacionDocument8 paginiProyecto Taller de InvestigacionOmar CruzÎncă nu există evaluări
- Instrumentacion Practica 6Document10 paginiInstrumentacion Practica 6nicky nolivos100% (1)
- Practica 2 Letrero ArduinoDocument18 paginiPractica 2 Letrero ArduinoVictor VicmanÎncă nu există evaluări
- Informe 1Document10 paginiInforme 1meljazpÎncă nu există evaluări
- Practica 2 DisplayDocument2 paginiPractica 2 DisplayKevin DavidÎncă nu există evaluări
- Unit 2 - Clasificacion Por Estructura PLCDocument26 paginiUnit 2 - Clasificacion Por Estructura PLCJaret GarciaÎncă nu există evaluări
- Informe Instrumentacion Basica ESPOLDocument5 paginiInforme Instrumentacion Basica ESPOLLoor Estevez IZacÎncă nu există evaluări
- Modelado de Un Motor de DC.Document3 paginiModelado de Un Motor de DC.Carlos Andrés Pérez Ramírez100% (1)
- ServomecanismosDocument3 paginiServomecanismosEdwin VilcaÎncă nu există evaluări
- Trifasico Como MonofasicoDocument18 paginiTrifasico Como MonofasicoJohann Smith Aranda RamosÎncă nu există evaluări
- 18-10-19 Deber Modelacion Matematica Sistemas de Control 2T 2018-2019Document9 pagini18-10-19 Deber Modelacion Matematica Sistemas de Control 2T 2018-2019manuel medinaÎncă nu există evaluări
- Conceptos Generales de Una Subestación Encapsulada en Gas Hexafluoruro de Azufre SF6Document22 paginiConceptos Generales de Una Subestación Encapsulada en Gas Hexafluoruro de Azufre SF6Elvin García MoratoÎncă nu există evaluări
- Control PID para Un Motor DC Controlado Por ArmaduraDocument17 paginiControl PID para Un Motor DC Controlado Por ArmaduraRicharson OchoaÎncă nu există evaluări
- Detector de ObjetosDocument17 paginiDetector de ObjetosDaniel Torres Quispe100% (1)
- PR10 - Mando Cilindro Doble Efecto-AndDocument2 paginiPR10 - Mando Cilindro Doble Efecto-AndrobmilaÎncă nu există evaluări
- Capítulo 02-Perifericos Básicos PICDocument10 paginiCapítulo 02-Perifericos Básicos PICNelson VargasÎncă nu există evaluări
- Caracteristicas Tecnicas Interruptores de Potencia 34.5kvDocument15 paginiCaracteristicas Tecnicas Interruptores de Potencia 34.5kvCarlos Avalos100% (1)
- Simulación de Un Sistema Dinámico de Segundo Orden en Tiempo Continuo y DiscretoDocument7 paginiSimulación de Un Sistema Dinámico de Segundo Orden en Tiempo Continuo y DiscretoWorldWarWebÎncă nu există evaluări
- Laboratorio Dynamixel PDFDocument5 paginiLaboratorio Dynamixel PDFluis quitianÎncă nu există evaluări
- Presentación 5.1 - Análisis de Sistemas de Control DiscretosDocument19 paginiPresentación 5.1 - Análisis de Sistemas de Control DiscretosomarÎncă nu există evaluări
- Capitulos UltrasonidoDocument81 paginiCapitulos UltrasonidoMiguel Hernández SanchezÎncă nu există evaluări
- Fuente de PoderDocument26 paginiFuente de PoderManuel FloresÎncă nu există evaluări
- Proyecto Final Control de Motor PIDDocument15 paginiProyecto Final Control de Motor PIDeduardo hernandezÎncă nu există evaluări
- Ingenieria de ControlDocument5 paginiIngenieria de Controljosmiguel_bvÎncă nu există evaluări
- Informe - PLC ProyectoDocument20 paginiInforme - PLC ProyectoIsmaelGuevaraÎncă nu există evaluări
- Elementos de Diagnostico para RobotsDocument6 paginiElementos de Diagnostico para RobotsJoseÎncă nu există evaluări
- Diseño y Montaje de Un Controlador Pid de Posiciòn de Un Motor DCDocument10 paginiDiseño y Montaje de Un Controlador Pid de Posiciòn de Un Motor DCOscar Dario Cristancho SaboyaÎncă nu există evaluări
- Informe TransformadoresDocument16 paginiInforme TransformadoresKlever MoralesÎncă nu există evaluări
- Componentes de Los Motores BrushedDocument4 paginiComponentes de Los Motores BrushedWinson Marza VeraÎncă nu există evaluări
- Informe-Proyecto-Se-La Florida PDFDocument49 paginiInforme-Proyecto-Se-La Florida PDFcarlosmorgadohdzÎncă nu există evaluări
- Sensores y TransductoresDocument4 paginiSensores y TransductoresAlvaro DélegÎncă nu există evaluări
- Levitador MagneticoDocument17 paginiLevitador MagneticoManuell NegreteÎncă nu există evaluări
- Catalogo Sica IndustrialDocument24 paginiCatalogo Sica IndustrialmiguelarcienegaÎncă nu există evaluări
- Catalog Vacuum Circuit Breakers 3ah5 - Es PDFDocument36 paginiCatalog Vacuum Circuit Breakers 3ah5 - Es PDFClaudio San MartinÎncă nu există evaluări
- Etn702lab LabDocument4 paginiEtn702lab LabRolando Choque CahuanaÎncă nu există evaluări
- Informe 1 - Control Avanzado 2018Document6 paginiInforme 1 - Control Avanzado 2018Pedro CachañaÎncă nu există evaluări
- ProyectoDocument10 paginiProyectoluis garcesÎncă nu există evaluări
- Arranque de Motores Trifásicos de InducciónDocument12 paginiArranque de Motores Trifásicos de InducciónMaría Teresa Hernández Gamarra100% (2)
- Tarea 4 Control DigitalDocument6 paginiTarea 4 Control DigitalAldo CarrilloÎncă nu există evaluări
- Motores A Pasos y ServomotoresDocument18 paginiMotores A Pasos y ServomotoresPablo JimenezÎncă nu există evaluări
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De la EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Încă nu există evaluări
- Contadores MonolíticosDocument15 paginiContadores MonolíticosJean Carlo ArrietaÎncă nu există evaluări
- Laboratorio 7 - Tanque HidroneumaticoDocument10 paginiLaboratorio 7 - Tanque HidroneumaticoJean Carlo ArrietaÎncă nu există evaluări
- Frecuencia Natural, Resonancia y Velocidad CriticaDocument24 paginiFrecuencia Natural, Resonancia y Velocidad CriticaJean Carlo Arrieta80% (5)
- Contadores MonolíticosDocument15 paginiContadores MonolíticosJean Carlo ArrietaÎncă nu există evaluări
- Apartarrayos InvDocument13 paginiApartarrayos InvAlexx Torres100% (1)
- Cuestionario1 MataGarneloJorgeDocument7 paginiCuestionario1 MataGarneloJorgeJorge Mata GarneloÎncă nu există evaluări
- Distancias de Seguridad Linea 230 KVDocument39 paginiDistancias de Seguridad Linea 230 KVMaria Fernanda SanchezÎncă nu există evaluări
- Que Coreiente Soporta Los Hu7manosDocument13 paginiQue Coreiente Soporta Los Hu7manosCharles Antony Suaña VilcaÎncă nu există evaluări
- Decargar MonopoloDocument6 paginiDecargar MonopoloHugo Bueno ZavaletaÎncă nu există evaluări
- 1ra Práctica Calificada de Máq. Eléctricas Est y Rotativas (I36N) Sección 16777Document3 pagini1ra Práctica Calificada de Máq. Eléctricas Est y Rotativas (I36N) Sección 16777Angel AlonsoÎncă nu există evaluări
- Ejercicios Redes 8 PDF FreeDocument3 paginiEjercicios Redes 8 PDF FreetusmiertoÎncă nu există evaluări
- Proteccion PDFDocument134 paginiProteccion PDFoscing1Încă nu există evaluări
- Manual de Instrucciones PR 2 HS ES Manual de Instrucciones PUB 5142555 000Document20 paginiManual de Instrucciones PR 2 HS ES Manual de Instrucciones PUB 5142555 000Marcos Nava BarbozaÎncă nu există evaluări
- Ife 3Document2 paginiIfe 3Eddy UberguagaÎncă nu există evaluări
- GeneradoresDocument36 paginiGeneradoresanon_79864489Încă nu există evaluări
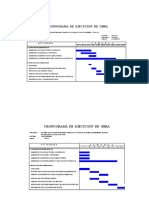
- Cronograma de ObraDocument3 paginiCronograma de ObraMiriamPoloAlfaro100% (1)
- Ensayo FinalDocument13 paginiEnsayo FinalFatima LlanqueÎncă nu există evaluări
- Sistema Direct Drive en Lavarropas LG (Incluye Error LE) - 61140Document12 paginiSistema Direct Drive en Lavarropas LG (Incluye Error LE) - 61140AlbertoAcostaVerdugoÎncă nu există evaluări
- Sensores, Relés y Contactores.Document47 paginiSensores, Relés y Contactores.ledpp100% (1)
- Circuitos RCDocument2 paginiCircuitos RCparanoidandroid96Încă nu există evaluări
- Amplificador de Pequena Senal Con UA741Document2 paginiAmplificador de Pequena Senal Con UA741EfrainÎncă nu există evaluări
- Cap II Medidas Electricas PDFDocument133 paginiCap II Medidas Electricas PDFYeffrey Barreto CarrascoÎncă nu există evaluări
- Tipos de Turbinas EólicasDocument3 paginiTipos de Turbinas EólicasIvan LedesmaÎncă nu există evaluări
- Degradación de Señal en Fibras ÓpticasDocument101 paginiDegradación de Señal en Fibras ÓpticasWildines López100% (2)
- Panel Solar Clase 3.1Document48 paginiPanel Solar Clase 3.1selso sanchez neyraÎncă nu există evaluări
- Informe 1 ElectroscopioDocument6 paginiInforme 1 ElectroscopioNicole Tatiana Perez MenesesÎncă nu există evaluări
- Transistor - Diego Pérez 616 PDFDocument25 paginiTransistor - Diego Pérez 616 PDFDiego PerezÎncă nu există evaluări
- FO233-018D Bitácora Realiza y Mantiene Instalaciones EléctricasDocument16 paginiFO233-018D Bitácora Realiza y Mantiene Instalaciones EléctricasRamírez SánchezÎncă nu există evaluări
- Guia de Instalacion ElectricaDocument41 paginiGuia de Instalacion ElectricaJorge Santiago VeramendiÎncă nu există evaluări
- 5.-Ess 2 DocumentosDocument180 pagini5.-Ess 2 DocumentosVale MartinezÎncă nu există evaluări
- Janitza BHB Umg103 CBM Es 1Document62 paginiJanitza BHB Umg103 CBM Es 1almenargÎncă nu există evaluări