S-ar putea să vă placă și
- Implementation and Transition of Data Interchange For Geotechnical and Geoenvironmental Specialists (DIGGS v2.0)Document217 paginiImplementation and Transition of Data Interchange For Geotechnical and Geoenvironmental Specialists (DIGGS v2.0)Pedro Troncoso AcuñaÎncă nu există evaluări
- 4 Design and Typical Details of Connections For Precast and Prestessed ConcreteDocument246 pagini4 Design and Typical Details of Connections For Precast and Prestessed Concretesam100% (1)
- Suggested Analysis and Design Procedures For Combined Footings and MatsDocument21 paginiSuggested Analysis and Design Procedures For Combined Footings and MatsTahir KhanÎncă nu există evaluări
- Tm3-b9 Barlow Wtaqv2 ReportDocument52 paginiTm3-b9 Barlow Wtaqv2 ReportPedro Troncoso AcuñaÎncă nu există evaluări
- Geoscience Frontiers: Bashar TarawnehDocument6 paginiGeoscience Frontiers: Bashar TarawnehPedro Troncoso AcuñaÎncă nu există evaluări
- Ufc 3 310 04 2013 c1Document134 paginiUfc 3 310 04 2013 c1Ral GLÎncă nu există evaluări
- 2014 Lee Et Al-Real Time Monitoring of SPTDocument10 pagini2014 Lee Et Al-Real Time Monitoring of SPTPedro Troncoso AcuñaÎncă nu există evaluări
- Dynamics Manual V8Document72 paginiDynamics Manual V8Josua Ferry ManurungÎncă nu există evaluări
- 5.9 Sanchez-Sesma Et AlDocument12 pagini5.9 Sanchez-Sesma Et AlPedro Troncoso AcuñaÎncă nu există evaluări
- SiteSpecificSeismicHazardAnalysis McGuire ToroDocument6 paginiSiteSpecificSeismicHazardAnalysis McGuire ToroPedro Troncoso AcuñaÎncă nu există evaluări
- 11 Seismic Site CharacterizationDocument36 pagini11 Seismic Site CharacterizationPedro Troncoso AcuñaÎncă nu există evaluări
- 2015 - Chandra - In Situ Assessment of the G-γ Curve for Characterizing the Nonlinear Response of Soil - Application to the Garner Valley Downhole Array and the Wildlife Liquefaction ArrayDocument18 pagini2015 - Chandra - In Situ Assessment of the G-γ Curve for Characterizing the Nonlinear Response of Soil - Application to the Garner Valley Downhole Array and the Wildlife Liquefaction ArrayPedro Troncoso AcuñaÎncă nu există evaluări
- Validation Manual Plaxis LogicielDocument0 paginiValidation Manual Plaxis LogicielAlex MeiraÎncă nu există evaluări
- 1 s2.0 S2212671612001618 MainDocument6 pagini1 s2.0 S2212671612001618 MainPedro Troncoso AcuñaÎncă nu există evaluări
- Prácticas 1 2 y 3Document3 paginiPrácticas 1 2 y 3Pedro Troncoso AcuñaÎncă nu există evaluări
- 1 s2.0 S2212671612001618 MainDocument6 pagini1 s2.0 S2212671612001618 MainPedro Troncoso AcuñaÎncă nu există evaluări
- Bettig Bard Scherbaum Riepl Cotton Cornou and Hatzfeld 2001-Bgta-Analysis of Dense Array Noise Measurements Using The Modified Spatial Auto-Correlation Method Spac - Application To The Grenoble AreaDocument24 paginiBettig Bard Scherbaum Riepl Cotton Cornou and Hatzfeld 2001-Bgta-Analysis of Dense Array Noise Measurements Using The Modified Spatial Auto-Correlation Method Spac - Application To The Grenoble AreaPedro Troncoso AcuñaÎncă nu există evaluări
- Volume Change in Unsaturated Soils From Cyclic LoadingDocument62 paginiVolume Change in Unsaturated Soils From Cyclic LoadingPedro Troncoso AcuñaÎncă nu există evaluări
- 13wcee 002270Document12 pagini13wcee 002270Pedro Troncoso AcuñaÎncă nu există evaluări
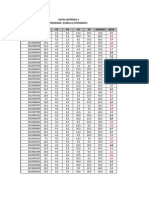
- Notas Certámen 1 PREGRADO - (554022-0) TOPOGRAFIADocument2 paginiNotas Certámen 1 PREGRADO - (554022-0) TOPOGRAFIAPedro Troncoso AcuñaÎncă nu există evaluări
- 13wcee 002270Document12 pagini13wcee 002270Pedro Troncoso AcuñaÎncă nu există evaluări
- 14 06-0085Document8 pagini14 06-0085Pedro Troncoso AcuñaÎncă nu există evaluări
- Validation of Simple Shear Tests For Parameter Identification Considering The Evolution of Plastic AnisotropyDocument9 paginiValidation of Simple Shear Tests For Parameter Identification Considering The Evolution of Plastic AnisotropyPedro Troncoso AcuñaÎncă nu există evaluări
- Validation of Simple Shear Tests For Parameter Identification Considering The Evolution of Plastic AnisotropyDocument9 paginiValidation of Simple Shear Tests For Parameter Identification Considering The Evolution of Plastic AnisotropyPedro Troncoso AcuñaÎncă nu există evaluări
- Preservation ManualDocument159 paginiPreservation ManualPedro Troncoso Acuña100% (1)
- Seismic Risks For Embankments: Key ConceptsDocument28 paginiSeismic Risks For Embankments: Key ConceptsPedro Troncoso AcuñaÎncă nu există evaluări
- Validation of Simple Shear Tests For Parameter Identification Considering The Evolution of Plastic AnisotropyDocument9 paginiValidation of Simple Shear Tests For Parameter Identification Considering The Evolution of Plastic AnisotropyPedro Troncoso AcuñaÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Art of First DueDocument32 paginiArt of First DuedadaditdahÎncă nu există evaluări
- NATURAL SELECTION (Battle of The Beaks)Document5 paginiNATURAL SELECTION (Battle of The Beaks)Julius CortezoÎncă nu există evaluări
- Formalization of UML Use Case Diagram-A Z Notation Based ApproachDocument6 paginiFormalization of UML Use Case Diagram-A Z Notation Based ApproachAnonymous PQ4M0ZzG7yÎncă nu există evaluări
- SMT Syllabus 2018 19Document90 paginiSMT Syllabus 2018 19sanjanaÎncă nu există evaluări
- RSP OSS SchulungDocument248 paginiRSP OSS Schulungsalloum18Încă nu există evaluări
- 04 Vaca Muerta Shale PDFDocument14 pagini04 Vaca Muerta Shale PDFsanty222Încă nu există evaluări
- Indirectness and Euphemism PDFDocument30 paginiIndirectness and Euphemism PDFmgar10Încă nu există evaluări
- Usm StanDocument5 paginiUsm StanClaresta JaniceÎncă nu există evaluări
- Humanities Social Sciences DistinctionsDocument3 paginiHumanities Social Sciences DistinctionsDavid0% (1)
- PLDP Report - Mba ProfDocument21 paginiPLDP Report - Mba ProfChaitanya NarvekarÎncă nu există evaluări
- Esp QuestionnaireDocument9 paginiEsp QuestionnaireMarivic SolijonÎncă nu există evaluări
- MPhil/PhD Development Planning at The Bartlett Development Planning Unit. University College LondonDocument2 paginiMPhil/PhD Development Planning at The Bartlett Development Planning Unit. University College LondonThe Bartlett Development Planning Unit - UCLÎncă nu există evaluări
- List of HEIsDocument2 paginiList of HEIsNadine MercadoÎncă nu există evaluări
- Unit 29 Sentence Structure in EnglishDocument11 paginiUnit 29 Sentence Structure in Englishj pcÎncă nu există evaluări
- Course Outlines For CA3144 Sem A 2014-15Document3 paginiCourse Outlines For CA3144 Sem A 2014-15kkluk913Încă nu există evaluări
- Method Statement For Surface Preparation and Coating For Pipes Fittings (Perma)Document10 paginiMethod Statement For Surface Preparation and Coating For Pipes Fittings (Perma)Mohamed KhalilÎncă nu există evaluări
- AQUINAS de Motu Cordis LAT - ENGDocument9 paginiAQUINAS de Motu Cordis LAT - ENGOta FlegrÎncă nu există evaluări
- Unit - Ii: Types of CommunicationDocument73 paginiUnit - Ii: Types of CommunicationAustinÎncă nu există evaluări
- The Filipino Family Today: A Sociological Perspective: Mark Godwin B. Villareal Adamson UniversityDocument48 paginiThe Filipino Family Today: A Sociological Perspective: Mark Godwin B. Villareal Adamson UniversityAmanda Alejo SalamancaÎncă nu există evaluări
- Ground Water Brochure of Jhansi District, Uttar Pradesh: Title Page NoDocument19 paginiGround Water Brochure of Jhansi District, Uttar Pradesh: Title Page NoSandeep KumarÎncă nu există evaluări
- Edible Cell WorksheetDocument3 paginiEdible Cell Worksheetm_frajman100% (4)
- User fc20 PDFDocument34 paginiUser fc20 PDFjesus diasÎncă nu există evaluări
- Earn A Masters Degree in Computer Science With Paid Internship in A Company in The U.SDocument12 paginiEarn A Masters Degree in Computer Science With Paid Internship in A Company in The U.SGERAUDÎncă nu există evaluări
- Essay 2: Technology Taking Over .PDF Parent TrapDocument2 paginiEssay 2: Technology Taking Over .PDF Parent TrapGideon CropÎncă nu există evaluări
- KG 2 Week 5 - (133089689484163457) - 0Document3 paginiKG 2 Week 5 - (133089689484163457) - 0Nahdat Al Ghad International SchoolÎncă nu există evaluări
- Onity AdvanceRFIDDocument4 paginiOnity AdvanceRFIDLittle_Bit77Încă nu există evaluări
- Factors Affecting Employee Turnover and Job SatisfactionDocument14 paginiFactors Affecting Employee Turnover and Job Satisfactionfarah goharÎncă nu există evaluări
- Harris-Benedict Equation - WikipediaDocument3 paginiHarris-Benedict Equation - WikipediaRao Ghayoor Dx0% (1)
- Frankel 1991 PDFDocument17 paginiFrankel 1991 PDFFábio SilvaÎncă nu există evaluări
- Direct SeriesDocument22 paginiDirect SeriesSahil SethiÎncă nu există evaluări