S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Steps To Private Placement Programs (PPP) DeskDocument7 paginiSteps To Private Placement Programs (PPP) DeskPattasan U100% (1)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Salesforce Platform Developer 1Document15 paginiSalesforce Platform Developer 1Kosmic PowerÎncă nu există evaluări
- Ies RP 7 2001Document88 paginiIes RP 7 2001Donald Gabriel100% (3)
- Crypto ProcessorDocument16 paginiCrypto ProcessorYarlagadda Venkatesh ChowdaryÎncă nu există evaluări
- Microwave Transistor Amplifiers Analysis and DesignDocument516 paginiMicrowave Transistor Amplifiers Analysis and DesignSudip95% (37)
- Method Statement For LVAC Panel TestingDocument9 paginiMethod Statement For LVAC Panel TestingPandrayar MaruthuÎncă nu există evaluări
- Adobe Photoshop 9 Cs2 Serial + Activation Number & Autorization Code ADocument1 paginăAdobe Photoshop 9 Cs2 Serial + Activation Number & Autorization Code ARd Fgt36% (22)
- BC01Document14 paginiBC01kishore3888Încă nu există evaluări
- 570 FinalDocument13 pagini570 FinalYarlagadda Venkatesh ChowdaryÎncă nu există evaluări
- 580 OutDocument2 pagini580 OutYarlagadda Venkatesh ChowdaryÎncă nu există evaluări
- And 2 M From A 1 W Light Point Source?Document1 paginăAnd 2 M From A 1 W Light Point Source?Yarlagadda Venkatesh ChowdaryÎncă nu există evaluări
- 543 PresentationDocument29 pagini543 PresentationYarlagadda Venkatesh ChowdaryÎncă nu există evaluări
- 16 Crypto ProcessorsDocument6 pagini16 Crypto ProcessorsYarlagadda Venkatesh ChowdaryÎncă nu există evaluări
- SISU Datenblatt 7-ZylDocument2 paginiSISU Datenblatt 7-ZylMuhammad rizkiÎncă nu există evaluări
- SMG Wireless Gateway ManualV2.2.0Document95 paginiSMG Wireless Gateway ManualV2.2.0shahedctgÎncă nu există evaluări
- Flex VPNDocument3 paginiFlex VPNAnonymous nFOywQZÎncă nu există evaluări
- Nº SSR-1 NS-R-3 Draf R1 Site Evaluation For Nuclear Installations FRDocument33 paginiNº SSR-1 NS-R-3 Draf R1 Site Evaluation For Nuclear Installations FRdaniel addeÎncă nu există evaluări
- Agro Chems MrRGAgarwalDocument17 paginiAgro Chems MrRGAgarwalapi-3833893Încă nu există evaluări
- Capital Asset Pricing ModelDocument11 paginiCapital Asset Pricing ModelrichaÎncă nu există evaluări
- Earth Planet - Google SearchDocument1 paginăEarth Planet - Google SearchDaivik Lakkol Eswara PrasadÎncă nu există evaluări
- Shilpa PPT FinalDocument51 paginiShilpa PPT FinalDrakeÎncă nu există evaluări
- Product Models Comparison: Fortigate 1100E Fortigate 1800FDocument1 paginăProduct Models Comparison: Fortigate 1100E Fortigate 1800FAbdullah AmerÎncă nu există evaluări
- InfosysDocument22 paginiInfosysTarun Singhal50% (2)
- Quiz - DBA and Tcont Bw-TypesDocument4 paginiQuiz - DBA and Tcont Bw-TypesSaifullah Malik100% (1)
- COA (Odoo Egypt)Document8 paginiCOA (Odoo Egypt)menams2010Încă nu există evaluări
- Educ 3 ReviewerDocument21 paginiEduc 3 ReviewerMa.Lourdes CamporidondoÎncă nu există evaluări
- Common Size Statement: A Technique of Financial Analysis: June 2019Document8 paginiCommon Size Statement: A Technique of Financial Analysis: June 2019safa haddadÎncă nu există evaluări
- Which Delivery Method Is Best Suitable For Your Construction Project?Document13 paginiWhich Delivery Method Is Best Suitable For Your Construction Project?H-Tex EnterprisesÎncă nu există evaluări
- Best Practices For SAP-PM History DocumentationDocument8 paginiBest Practices For SAP-PM History DocumentationLaammeem Noon100% (1)
- DMT80600L104 21WTR Datasheet DATASHEETDocument3 paginiDMT80600L104 21WTR Datasheet DATASHEETtnenÎncă nu există evaluări
- FINAL Session 3 Specific GuidelinesDocument54 paginiFINAL Session 3 Specific GuidelinesBovelyn Autida-masingÎncă nu există evaluări
- JuliaPro v0.6.2.1 Package API ManualDocument480 paginiJuliaPro v0.6.2.1 Package API ManualCapitan TorpedoÎncă nu există evaluări
- Ceoeg-Cebqn Rev0Document3 paginiCeoeg-Cebqn Rev0jbarbosaÎncă nu există evaluări
- Gustilo Vs Gustilo IIIDocument1 paginăGustilo Vs Gustilo IIIMoon BeamsÎncă nu există evaluări
- Restaurant P&L ReportDocument4 paginiRestaurant P&L Reportnqobizitha giyaniÎncă nu există evaluări
- Emiish Me: Answer BookDocument7 paginiEmiish Me: Answer BookNickÎncă nu există evaluări
- Desarmado y Armado de Transmision 950BDocument26 paginiDesarmado y Armado de Transmision 950Bedilberto chableÎncă nu există evaluări
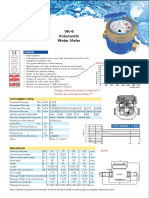
- Baylan: VK-6 Volumetric Water MeterDocument1 paginăBaylan: VK-6 Volumetric Water MeterSanjeewa ChathurangaÎncă nu există evaluări