S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- A2Z Puzzles PDF Part 1Document45 paginiA2Z Puzzles PDF Part 1SpeculeÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Chacha Bhatija Aur Mahamaya Ka JaalDocument51 paginiChacha Bhatija Aur Mahamaya Ka JaalSpecule75% (4)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Bhagwat PuranDocument977 paginiBhagwat PuranSujeet Shandilya100% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- BSC October 2017Document132 paginiBSC October 2017SpeculeÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Billoo Aur Sair SapataDocument26 paginiBilloo Aur Sair SapataSpecule100% (3)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Shaktimaan 8Document64 paginiShaktimaan 8Specule75% (4)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Motoo Patloo Aur Jute Ka HungamaDocument27 paginiMotoo Patloo Aur Jute Ka HungamaSpecule100% (2)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Ankur Aur Langda JaadugarDocument26 paginiAnkur Aur Langda JaadugarSpecule100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Chacha Chaudhary Aur Sabu Ka PerDocument87 paginiChacha Chaudhary Aur Sabu Ka PerSpecule25% (4)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Chacha Chaudhary Aur Shikari Lakadbagha SinghDocument47 paginiChacha Chaudhary Aur Shikari Lakadbagha SinghSpecule100% (2)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Pinky Digest - 47Document48 paginiPinky Digest - 47Specule73% (11)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Economist USA September 2-8-2017Document38 paginiThe Economist USA September 2-8-2017Specule0% (1)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Tau Ji Aur Jadu Ka DandaDocument28 paginiTau Ji Aur Jadu Ka DandaSpecule100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Tau Ji Aur Shakral Ki RajkumariDocument28 paginiTau Ji Aur Shakral Ki RajkumariSpecule100% (2)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Lal Bahadur ShastriDocument28 paginiLal Bahadur ShastriSpecule100% (1)
- Shaktimaan 8Document44 paginiShaktimaan 8Ankit SinghÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Tau Ji Aur Patal LokDocument50 paginiTau Ji Aur Patal LokSpecule100% (4)
- Fauladi Singh Aur Rahaysamaya DhamakeDocument37 paginiFauladi Singh Aur Rahaysamaya DhamakeSpecule60% (5)
- Detailed Advertisement 2017Document5 paginiDetailed Advertisement 2017SpeculeÎncă nu există evaluări
- Chotoo Lamboo Aur Lakhna DakaitDocument38 paginiChotoo Lamboo Aur Lakhna DakaitSpeculeÎncă nu există evaluări
- Ibps Po Pre Paper InfinitesimalDocument33 paginiIbps Po Pre Paper InfinitesimalSpeculeÎncă nu există evaluări
- RRB Clerk Pre Memory Based (Quantitative Aptitude) SolDocument6 paginiRRB Clerk Pre Memory Based (Quantitative Aptitude) SolSpeculeÎncă nu există evaluări
- Chacha Bhatija Aur Jaadui ChiragDocument39 paginiChacha Bhatija Aur Jaadui ChiragSpecule100% (1)
- VR10 Ug CseDocument169 paginiVR10 Ug CseLakshmi TharunÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Thermo NotesDocument12 paginiThermo NotesSamriddha Das GuptaÎncă nu există evaluări
- Unit 1 Lecture Notes Fiber OpticsDocument34 paginiUnit 1 Lecture Notes Fiber OpticsAnonymous 0xl5MxpYw33% (3)
- The Fluencia e BookDocument141 paginiThe Fluencia e Bookali noorÎncă nu există evaluări
- Solution Assignment # 3Document5 paginiSolution Assignment # 3PhD EE100% (1)
- Science 9 Q4 Module 5 WK 5 v.01 CC Released 29may2021Document22 paginiScience 9 Q4 Module 5 WK 5 v.01 CC Released 29may2021Jecka FranciscoÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- ENSC 14A - Chapter 1Document40 paginiENSC 14A - Chapter 1deusleanÎncă nu există evaluări
- Damped Free VibrationDocument6 paginiDamped Free Vibrationraffiq85Încă nu există evaluări
- Manual ChemotaxisToolDocument24 paginiManual ChemotaxisToolMeera Kshiti PhulphagarÎncă nu există evaluări
- Physics ProjectDocument13 paginiPhysics Projectvani sarohaÎncă nu există evaluări
- JP - Electrooptical Effects in SiliconDocument7 paginiJP - Electrooptical Effects in SiliconDr-Mandeep SinghÎncă nu există evaluări
- Transport Phenomena - Fluid Mechanics Problem (Newtonian Fluid Flow in A Circular Tube)Document9 paginiTransport Phenomena - Fluid Mechanics Problem (Newtonian Fluid Flow in A Circular Tube)T Bagus Tri LusmonoÎncă nu există evaluări
- Latent HeatDocument21 paginiLatent HeatFiona RozarioÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Astm e 473 Rev A 2006 PDFDocument3 paginiAstm e 473 Rev A 2006 PDFJORGE ARTURO TORIBIO HUERTAÎncă nu există evaluări
- Merida FullProf A PDFDocument24 paginiMerida FullProf A PDFAhmad AwadallahÎncă nu există evaluări
- Interference of Acoustic Waves, Stationary Waves and Diffraction at A Slot With PC IntDocument7 paginiInterference of Acoustic Waves, Stationary Waves and Diffraction at A Slot With PC IntJose GalvanÎncă nu există evaluări
- Battley 1995 (Opinion) - Advantages and Disadvantages of Direct & Indirect CalorimetryDocument16 paginiBattley 1995 (Opinion) - Advantages and Disadvantages of Direct & Indirect CalorimetryAndreas FlouÎncă nu există evaluări
- The Concept of StrainDocument188 paginiThe Concept of StrainWint Thu HtunÎncă nu există evaluări
- VC PDE Lesson PlanDocument2 paginiVC PDE Lesson PlanKaushik RamgudeÎncă nu există evaluări
- Burns & Mayne (S&F 2002) PiezoDissipationDocument7 paginiBurns & Mayne (S&F 2002) PiezoDissipationJesus GonzalezÎncă nu există evaluări
- A. Gravity B. CDocument3 paginiA. Gravity B. CEstelle Nica Marie DunlaoÎncă nu există evaluări
- NIT, Hamirpur: CFD: Developments, Applications & AnalysisDocument10 paginiNIT, Hamirpur: CFD: Developments, Applications & AnalysisAnkesh Kapil100% (1)
- Doppler EffectDocument47 paginiDoppler EffectLouies UngriaÎncă nu există evaluări
- Atomic Imperfections / Point Defects: Vacancy DefectDocument4 paginiAtomic Imperfections / Point Defects: Vacancy DefectDilip Vijay RamÎncă nu există evaluări
- Aircraft PropulsionDocument23 paginiAircraft Propulsionmentalxfiction100% (2)
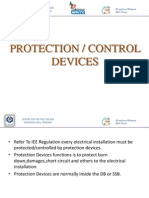
- Control DevicesDocument19 paginiControl DevicesSuzaini SupingatÎncă nu există evaluări
- Kendriya Vidyalaya HebbalDocument15 paginiKendriya Vidyalaya HebbalARNAB DASÎncă nu există evaluări
- Axial PErmanent MAgnetDocument6 paginiAxial PErmanent MAgnetSatyam Swarup100% (1)
- Piotr T Chrusciel and Gabriel Nagy - The Hamiltonian Mass of Asymptotically Anti-De Sitter Space-TimesDocument8 paginiPiotr T Chrusciel and Gabriel Nagy - The Hamiltonian Mass of Asymptotically Anti-De Sitter Space-TimesGijke3Încă nu există evaluări
- The Voice of God: Experience A Life Changing Relationship with the LordDe la EverandThe Voice of God: Experience A Life Changing Relationship with the LordÎncă nu există evaluări
- Confinement (Book #1 in the Love and Madness series)De la EverandConfinement (Book #1 in the Love and Madness series)Încă nu există evaluări