S-ar putea să vă placă și
- Lay and TraverseDocument30 paginiLay and TraverseHumberto AnguloÎncă nu există evaluări
- Basic Math CompleteDocument120 paginiBasic Math CompleteNathaniel DennisÎncă nu există evaluări
- Chapter 6 - ORTHOGRAPHIC PROJECTIONDocument35 paginiChapter 6 - ORTHOGRAPHIC PROJECTIONHumberto AnguloÎncă nu există evaluări
- 828D SF PDFDocument72 pagini828D SF PDFRMK BrothersÎncă nu există evaluări
- Basic Math CompleteDocument120 paginiBasic Math CompleteNathaniel DennisÎncă nu există evaluări
- GDT Reference Book Engl 2.0fDocument165 paginiGDT Reference Book Engl 2.0fMurat Çakar87% (15)
- FOD Awareness: Basic Training in Foreign Object Damage PreventionDocument35 paginiFOD Awareness: Basic Training in Foreign Object Damage PreventionHumberto AnguloÎncă nu există evaluări
- Workshop K - RinggerDocument59 paginiWorkshop K - RinggerHumberto AnguloÎncă nu există evaluări
- FOD Awareness: Basic Training in Foreign Object Damage PreventionDocument35 paginiFOD Awareness: Basic Training in Foreign Object Damage PreventionHumberto AnguloÎncă nu există evaluări
- Gaining Confidence With GD T - Part 1 PDFDocument24 paginiGaining Confidence With GD T - Part 1 PDFthomastan02Încă nu există evaluări
- EMAG ECM Basics EnglDocument99 paginiEMAG ECM Basics EnglHumberto AnguloÎncă nu există evaluări
- MILACRON OPERATING MANUAL (Rexonavn - Com)Document405 paginiMILACRON OPERATING MANUAL (Rexonavn - Com)Cempeireng Iyalah100% (3)
- Haas Lathe ProgrammingDocument146 paginiHaas Lathe ProgrammingHumberto AnguloÎncă nu există evaluări
- CNC Programming WorkshopDocument150 paginiCNC Programming WorkshopThanh BaronÎncă nu există evaluări
- Trades Math Workbook PDFDocument32 paginiTrades Math Workbook PDFDiyaNegiÎncă nu există evaluări
- Rroys Catalogo de MaterialesDocument2 paginiRroys Catalogo de MaterialesHumberto AnguloÎncă nu există evaluări
- As 9102 FormsDocument4 paginiAs 9102 FormsHumberto AnguloÎncă nu există evaluări
- Machine Shop Fluid Maintenance PDFDocument5 paginiMachine Shop Fluid Maintenance PDFHumberto AnguloÎncă nu există evaluări
- Impact Pendulum Test Systems PDFDocument8 paginiImpact Pendulum Test Systems PDFHumberto AnguloÎncă nu există evaluări
- C 1016Document3 paginiC 1016Humberto AnguloÎncă nu există evaluări
- 0 Math Minute 8th Grade PDFDocument112 pagini0 Math Minute 8th Grade PDFHumberto Angulo50% (4)
- Troubleshooting GuideDocument16 paginiTroubleshooting GuideHumberto AnguloÎncă nu există evaluări
- First Article Inspection InstructionDocument21 paginiFirst Article Inspection Instructiongranburyjohnstevens100% (1)
- TMT 500Document4 paginiTMT 500Humberto AnguloÎncă nu există evaluări
- ABN7638 2 RevisedDocument1 paginăABN7638 2 RevisedHumberto AnguloÎncă nu există evaluări
- Interview EnglishDocument4 paginiInterview EnglishHumberto AnguloÎncă nu există evaluări
- 02 MachiningDocument34 pagini02 MachiningHumberto AnguloÎncă nu există evaluări
- Proyecto de Mini Dron - Desarrollo Propio de Tecnologia - Sin ArduinoDocument22 paginiProyecto de Mini Dron - Desarrollo Propio de Tecnologia - Sin ArduinoHumberto AnguloÎncă nu există evaluări
- Quadcopter Presentation Quadcopter Presentation by Chomp by ChompDocument15 paginiQuadcopter Presentation Quadcopter Presentation by Chomp by ChompHumberto AnguloÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Permanent Magnet DC MotorDocument4 paginiPermanent Magnet DC MotorSourav Kumar100% (1)
- DIN 51825 German Grease Classification System PDFDocument1 paginăDIN 51825 German Grease Classification System PDFsoumya ghoshÎncă nu există evaluări
- 2018 1 X Y HamadaDocument28 pagini2018 1 X Y HamadaGaurav Kumar ThakurÎncă nu există evaluări
- SM Ras-3m23gacv-E Ras-M10 13 16 GK (C) VP-eDocument105 paginiSM Ras-3m23gacv-E Ras-M10 13 16 GK (C) VP-eGoguredÎncă nu există evaluări
- Assignment #3Document2 paginiAssignment #3Choa Pei ShuangÎncă nu există evaluări
- Vertical turbine, axial, and mixed flow pumps guideDocument10 paginiVertical turbine, axial, and mixed flow pumps guideKitikhun VichanarksornsitÎncă nu există evaluări
- "DOL Starter": Submitted byDocument10 pagini"DOL Starter": Submitted byKartik InamdarÎncă nu există evaluări
- FEA Answers by Professor GuruprasadDocument146 paginiFEA Answers by Professor GuruprasadManendra SaiÎncă nu există evaluări
- Din 5480-1Document24 paginiDin 5480-1asd50% (2)
- OCH - Part1-Energy-Critica DepthDocument33 paginiOCH - Part1-Energy-Critica Depthtewodros getuÎncă nu există evaluări
- Vortex Induced Vibration Aquatic Clean Energy Ijariie4114Document5 paginiVortex Induced Vibration Aquatic Clean Energy Ijariie4114Reham El- DawyÎncă nu există evaluări
- LS Circuit IntroductionDocument18 paginiLS Circuit IntroductionMuhammad DaniÎncă nu există evaluări
- Genuine: Choose Every Time!Document40 paginiGenuine: Choose Every Time!DinamikaMarine50% (2)
- Is Schrodinger EquationDocument3 paginiIs Schrodinger EquationSpirosKoutandosÎncă nu există evaluări
- Archimedes PrincipleDocument4 paginiArchimedes Principleraviteja036Încă nu există evaluări
- Cryogenic Vacuum Insulated Piping System DesignDocument55 paginiCryogenic Vacuum Insulated Piping System DesignRajesh ReghuÎncă nu există evaluări
- LG4HKED-WE-VN53 - Engine Control System 4HK1Document404 paginiLG4HKED-WE-VN53 - Engine Control System 4HK1tuannholtt100% (8)
- 6.7L Cummins Maintenance Schedule & Service InformationDocument3 pagini6.7L Cummins Maintenance Schedule & Service InformationNick Brady100% (1)
- CVEN 444 Structural Concrete Design Structural System OverviewDocument40 paginiCVEN 444 Structural Concrete Design Structural System OverviewAhmed EwisÎncă nu există evaluări
- Dyn Tutorial 5.1 PDFDocument3 paginiDyn Tutorial 5.1 PDFTareq SammarÎncă nu există evaluări
- Di Pipes AuhDocument22 paginiDi Pipes AuhMaged SamirÎncă nu există evaluări
- Dynamics Final Exam CoverageDocument6 paginiDynamics Final Exam CoverageRhona BASKIÑASÎncă nu există evaluări
- Terminal Blocks ABBDocument36 paginiTerminal Blocks ABBalishaikh12Încă nu există evaluări
- Porosity or PermeabilityDocument30 paginiPorosity or PermeabilitytabibkarimÎncă nu există evaluări
- Soil Strength Testing With The Merrick FlexometerDocument95 paginiSoil Strength Testing With The Merrick Flexometerd080310Încă nu există evaluări
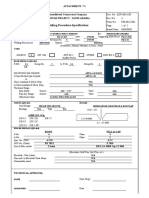
- Consolidated Contractors Welding Procedure SpecificationDocument3 paginiConsolidated Contractors Welding Procedure Specificationsiva8000100% (1)
- SA - Super Inverter - Original File PDFDocument32 paginiSA - Super Inverter - Original File PDFJojit Cantillep MagbutayÎncă nu există evaluări
- Rigid Pavement Thesis 3Document12 paginiRigid Pavement Thesis 3san htet aungÎncă nu există evaluări
- Sobek Endurance ToolsDocument14 paginiSobek Endurance ToolsAhmet KöseleciÎncă nu există evaluări
- Gallic 16 Engels Hld23 TornoDocument47 paginiGallic 16 Engels Hld23 TornoAdrian Macaya100% (1)