S-ar putea să vă placă și
- Regulation of Virtual WorldsDocument1 paginăRegulation of Virtual WorldsSandra RodriguezÎncă nu există evaluări
- 370Document1 pagină370Sandra RodriguezÎncă nu există evaluări
- IRC3180 - Senior Economist (Climate Change and Agriculture) P-5 - ESADocument3 paginiIRC3180 - Senior Economist (Climate Change and Agriculture) P-5 - ESASandra RodriguezÎncă nu există evaluări
- Notes: Preface To The Second EditionDocument1 paginăNotes: Preface To The Second EditionSandra RodriguezÎncă nu există evaluări
- 370Document1 pagină370Sandra RodriguezÎncă nu există evaluări
- 366Document1 pagină366Sandra RodriguezÎncă nu există evaluări
- And Cyberspace (New York: M&T Books, 1996), 63-81, Though More Interesting Variations OnDocument1 paginăAnd Cyberspace (New York: M&T Books, 1996), 63-81, Though More Interesting Variations OnSandra RodriguezÎncă nu există evaluări
- KS2 Teachers' Resources A Cross-Curricular Pack: RomansDocument1 paginăKS2 Teachers' Resources A Cross-Curricular Pack: RomansSandra RodriguezÎncă nu există evaluări
- Regulation of Virtual WorldsDocument1 paginăRegulation of Virtual WorldsSandra RodriguezÎncă nu există evaluări
- 366Document1 pagină366Sandra RodriguezÎncă nu există evaluări
- Chapter FourDocument1 paginăChapter FourSandra RodriguezÎncă nu există evaluări
- 371Document1 pagină371Sandra RodriguezÎncă nu există evaluări
- Chapter ThreeDocument1 paginăChapter ThreeSandra RodriguezÎncă nu există evaluări
- Chapter FourDocument1 paginăChapter FourSandra RodriguezÎncă nu există evaluări
- And Electronic Commerce (Boston: Kluwer Law International, 1998), XVDocument1 paginăAnd Electronic Commerce (Boston: Kluwer Law International, 1998), XVSandra RodriguezÎncă nu există evaluări
- Journal of Science and Technology Law 7 (2001) : 288, 299.: Chapter FiveDocument1 paginăJournal of Science and Technology Law 7 (2001) : 288, 299.: Chapter FiveSandra RodriguezÎncă nu există evaluări
- 372Document1 pagină372Sandra RodriguezÎncă nu există evaluări
- And Privacy in Cyberspace: The Online Protests Over Lotus Marketplace and The Clipper ChipDocument1 paginăAnd Privacy in Cyberspace: The Online Protests Over Lotus Marketplace and The Clipper ChipSandra RodriguezÎncă nu există evaluări
- Nities in Cyberspace, Edited by Marc A. Smith and Peter Kollock (London: Routledge, 1999), 109Document1 paginăNities in Cyberspace, Edited by Marc A. Smith and Peter Kollock (London: Routledge, 1999), 109Sandra RodriguezÎncă nu există evaluări
- 373Document1 pagină373Sandra RodriguezÎncă nu există evaluări
- 372Document1 pagină372Sandra RodriguezÎncă nu există evaluări
- 371Document1 pagină371Sandra RodriguezÎncă nu există evaluări
- KS2 Teachers' Resources A Cross-Curricular Pack: RomansDocument1 paginăKS2 Teachers' Resources A Cross-Curricular Pack: RomansSandra RodriguezÎncă nu există evaluări
- 375Document1 pagină375Sandra RodriguezÎncă nu există evaluări
- 377Document1 pagină377Sandra RodriguezÎncă nu există evaluări
- Chapter SevenDocument1 paginăChapter SevenSandra RodriguezÎncă nu există evaluări
- The United States: Constitutional Law, Edited by Philip B. Kurland and Gerhard Casper (WashDocument1 paginăThe United States: Constitutional Law, Edited by Philip B. Kurland and Gerhard Casper (WashSandra RodriguezÎncă nu există evaluări
- The United States: Constitutional Law, Edited by Philip B. Kurland and Gerhard Casper (WashDocument1 paginăThe United States: Constitutional Law, Edited by Philip B. Kurland and Gerhard Casper (WashSandra RodriguezÎncă nu există evaluări
- 377Document1 pagină377Sandra RodriguezÎncă nu există evaluări
- 380Document1 pagină380Sandra RodriguezÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Equilibrium of A Particle, The Free-Body Diagram & Coplanar Force SystemsDocument24 paginiEquilibrium of A Particle, The Free-Body Diagram & Coplanar Force SystemsAtef NazÎncă nu există evaluări
- Node diagnostics report for RBS6601WDocument9 paginiNode diagnostics report for RBS6601WWilson DiazÎncă nu există evaluări
- Valvula Selectora Trans.Document4 paginiValvula Selectora Trans.enriqueÎncă nu există evaluări
- 06-Fc428mar Water-in-Fuel Indicator Sensor Circuit - Voltage Above Normal or Shorted To High SourceDocument3 pagini06-Fc428mar Water-in-Fuel Indicator Sensor Circuit - Voltage Above Normal or Shorted To High SourceSuryadiÎncă nu există evaluări
- Customize ADFS sign-in page brandingDocument4 paginiCustomize ADFS sign-in page brandingmicu0% (1)
- Cyber Security Research Proposal - SandboxingDocument23 paginiCyber Security Research Proposal - SandboxingAnonymous Sa6jc83D100% (4)
- Fire Risk AssessmentDocument13 paginiFire Risk Assessmentteuku zulfikarÎncă nu există evaluări
- YZ250 Off-Road Bike Parts CatalogDocument55 paginiYZ250 Off-Road Bike Parts Catalogdwiyanti20Încă nu există evaluări
- Pressure Vessel Rivets Welded Joints MDSP PrimeDocument16 paginiPressure Vessel Rivets Welded Joints MDSP PrimeIvanÎncă nu există evaluări
- Estimating/ Construction Planning/ Scheduling and Programming/ Feasibility Project StudiesDocument4 paginiEstimating/ Construction Planning/ Scheduling and Programming/ Feasibility Project StudiesVholts Villa VitugÎncă nu există evaluări
- NTP35N15 Power MOSFET Features and SpecificationsDocument7 paginiNTP35N15 Power MOSFET Features and SpecificationsChristine GomezÎncă nu există evaluări
- Microcontrolled Electromagnetic Engine: Atul Kumar Singh, Prabhat Ranjan TripathiDocument4 paginiMicrocontrolled Electromagnetic Engine: Atul Kumar Singh, Prabhat Ranjan TripathiTarun SinghÎncă nu există evaluări
- Manual Service Aoc - E943fwskDocument51 paginiManual Service Aoc - E943fwskEduardo BentoÎncă nu există evaluări
- Tabla 1 Engine ControlDocument2 paginiTabla 1 Engine Controljulio montenegroÎncă nu există evaluări
- As 4123.4-2008 Mobile Waste Containers Containers With Four Wheels With A Capacity From 750 L To 1700 L WithDocument7 paginiAs 4123.4-2008 Mobile Waste Containers Containers With Four Wheels With A Capacity From 750 L To 1700 L WithSAI Global - APACÎncă nu există evaluări
- Dow Corning (R) 200 Fluid, 50 Cst.Document11 paginiDow Corning (R) 200 Fluid, 50 Cst.Sergio Gonzalez GuzmanÎncă nu există evaluări
- Failure Analysis of Syngas Bypass Line Rupture inDocument11 paginiFailure Analysis of Syngas Bypass Line Rupture inshahgardezÎncă nu există evaluări
- Heat Exchanger Systems en PPL 2015-03-01Document59 paginiHeat Exchanger Systems en PPL 2015-03-01corneltincuÎncă nu există evaluări
- Unit Conversion Heat TransferDocument5 paginiUnit Conversion Heat TransferFamela GadÎncă nu există evaluări
- XZX ZX ZXDocument4 paginiXZX ZX ZXWong VoonyeeÎncă nu există evaluări
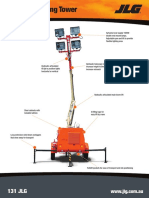
- JLG Lighting Tower 6308AN Series II 20150907Document2 paginiJLG Lighting Tower 6308AN Series II 20150907DwiSulistyo09Încă nu există evaluări
- Sample Purchase Specification For ClariflocculatorDocument1 paginăSample Purchase Specification For Clariflocculatorcontactdevansh1174Încă nu există evaluări
- Engine & Transmission ToolsDocument45 paginiEngine & Transmission Toolsabduallah muhammad100% (1)
- DiodeDocument22 paginiDiodeSaurabh Mittal100% (1)
- Challenges in PavementsDocument23 paginiChallenges in PavementsSomeshwar Rao ThakkallapallyÎncă nu există evaluări
- Electrical Measurements LabDocument40 paginiElectrical Measurements Labmdayyub100% (4)
- Beumer - Pipeconveyor TechnologyDocument51 paginiBeumer - Pipeconveyor TechnologyAli AlatasÎncă nu există evaluări
- Ice-Lined Refrigerator ManualDocument8 paginiIce-Lined Refrigerator ManualEmilioPerezBallesterosÎncă nu există evaluări
- Wireless Mouse m325 Quick Start GuideDocument2 paginiWireless Mouse m325 Quick Start GuideFabolos 9Încă nu există evaluări