S-ar putea să vă placă și
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsDe la EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsÎncă nu există evaluări
- Chapter 1-Webster Basic Concepts of Medical InstrumentationDocument46 paginiChapter 1-Webster Basic Concepts of Medical InstrumentationGama Kristian AdikurniaÎncă nu există evaluări
- Design and Comparison of Butterworth and Chebyshev Type-1 Low Pass Filter Using MatlabDocument16 paginiDesign and Comparison of Butterworth and Chebyshev Type-1 Low Pass Filter Using MatlabResearch Cell: An International Journal of Engineering SciencesÎncă nu există evaluări
- Advanced Instrumentation: - Course ContentsDocument22 paginiAdvanced Instrumentation: - Course Contentsee05d008Încă nu există evaluări
- Lecture 6 - Signals and Systems BasicsDocument30 paginiLecture 6 - Signals and Systems BasicsRohit Kumar SinghÎncă nu există evaluări
- Sample Lab ReportDocument11 paginiSample Lab ReportJonathan MischÎncă nu există evaluări
- Lecture 2: Measurement and InstrumentationDocument16 paginiLecture 2: Measurement and InstrumentationDeepali KundnaniÎncă nu există evaluări
- SergeyYurish Tutorial SIGNAL 2017Document108 paginiSergeyYurish Tutorial SIGNAL 2017Chao-Shiun WangÎncă nu există evaluări
- Instrumentation (Chapter 2)Document7 paginiInstrumentation (Chapter 2)Yab TadÎncă nu există evaluări
- Chapter 2 BiostaticsDocument17 paginiChapter 2 Biostaticsas739562978Încă nu există evaluări
- 8 Hints For Successful Impedance MeasuremDocument12 pagini8 Hints For Successful Impedance MeasuremJesús MartínezÎncă nu există evaluări
- Galicia Bode PlotDocument4 paginiGalicia Bode PlotmyravganacÎncă nu există evaluări
- Bode'S Plot Frequency Response Analysis: Hitech Instruction ManualDocument4 paginiBode'S Plot Frequency Response Analysis: Hitech Instruction ManualnileshsawÎncă nu există evaluări
- Lab01 FiltersDocument19 paginiLab01 Filtersjosh.ee11Încă nu există evaluări
- UNIT - 2 Sensors & TransducersDocument84 paginiUNIT - 2 Sensors & TransducersishaanmittalcollegeÎncă nu există evaluări
- Sensor Dynamic Static CharacteristicsDocument6 paginiSensor Dynamic Static CharacteristicsMantuomÎncă nu există evaluări
- Presentation On Sensors and ActuatorsDocument115 paginiPresentation On Sensors and ActuatorschibuikeÎncă nu există evaluări
- Vibration Measurement PDFDocument64 paginiVibration Measurement PDFAnonymous mXicTi8hBÎncă nu există evaluări
- ECEN325 Lab ManualDocument66 paginiECEN325 Lab ManualIrwan RamliÎncă nu există evaluări
- PTSP Unit6-VrcDocument151 paginiPTSP Unit6-VrcSonu GoudÎncă nu există evaluări
- Power Quality Analyzer IEC 61000-4-30 - CLASS A: ApplicationsDocument12 paginiPower Quality Analyzer IEC 61000-4-30 - CLASS A: ApplicationsalejandroÎncă nu există evaluări
- Assignment 2Document2 paginiAssignment 2EmtiazEmonÎncă nu există evaluări
- Suppression of Noise in The ECG Signal Using DigitDocument10 paginiSuppression of Noise in The ECG Signal Using Digitezekiel1611Încă nu există evaluări
- 1 CS2403 Two MarksDocument19 pagini1 CS2403 Two MarkssakthirsivarajanÎncă nu există evaluări
- 5 Instrument ClassificationDocument16 pagini5 Instrument Classificationboopsubha100% (1)
- Electronic FiltersDocument24 paginiElectronic Filtersprasad243243Încă nu există evaluări
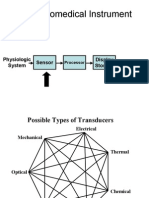
- Basic Biomedical Instrument: Sensor Display Storage Physiologic System ObserverDocument29 paginiBasic Biomedical Instrument: Sensor Display Storage Physiologic System Observerstevekct10Încă nu există evaluări
- Lab 7 Dynamic Parameters of 2 Order Measurement SystemsDocument6 paginiLab 7 Dynamic Parameters of 2 Order Measurement Systemsraylo4594Încă nu există evaluări
- Harmonic Frequency Estimation of Power Systems: J. K. Wu, Member, IEEE, B. T. He, Y. Hu, D. S. Luo and Y. LiangDocument8 paginiHarmonic Frequency Estimation of Power Systems: J. K. Wu, Member, IEEE, B. T. He, Y. Hu, D. S. Luo and Y. LiangFabien CallodÎncă nu există evaluări
- Basics of Digital FiltersDocument67 paginiBasics of Digital FiltersHogo GohÎncă nu există evaluări
- Unit-1 EMI 7-9-21Document24 paginiUnit-1 EMI 7-9-21Shivam Kumar YadavÎncă nu există evaluări
- Types of Transducers and Their Applications: Instrumentation and Product TestingDocument31 paginiTypes of Transducers and Their Applications: Instrumentation and Product TestingFemi PrinceÎncă nu există evaluări
- New Proposal MMKKNDocument5 paginiNew Proposal MMKKNishakubalamiÎncă nu există evaluări
- Basics of Digital FIltersDocument68 paginiBasics of Digital FIlters3141592hÎncă nu există evaluări
- Scribd Upload A Document Search Documents Explore Sign Up Log inDocument23 paginiScribd Upload A Document Search Documents Explore Sign Up Log inNayan ThakurÎncă nu există evaluări
- Emi Course FileDocument62 paginiEmi Course FileAli ArunÎncă nu există evaluări
- Design, Construction and Analysis of 60 HZ Notch Filters: Group M1Document16 paginiDesign, Construction and Analysis of 60 HZ Notch Filters: Group M1Estefanía MonteroÎncă nu există evaluări
- 60Hz Notch Filter Analysis BE309F98M1R01Document15 pagini60Hz Notch Filter Analysis BE309F98M1R0103458337271Încă nu există evaluări
- Types of Transducer and ApplicationDocument31 paginiTypes of Transducer and ApplicationcocojithuÎncă nu există evaluări
- Bio Instrum Intro1Document13 paginiBio Instrum Intro1CALEB DAVID ROMERO MERCADOÎncă nu există evaluări
- ch54MEASUREMENT TECHNIQUES IN RESPIRATORY MECHANICSDocument16 paginich54MEASUREMENT TECHNIQUES IN RESPIRATORY MECHANICSNithyaa SathishÎncă nu există evaluări
- SCT Digital Signal Processing ItDocument26 paginiSCT Digital Signal Processing ItSakthiRJÎncă nu există evaluări
- Industrial InstrumentationDocument20 paginiIndustrial InstrumentationNHIÊN CÙ VĂNÎncă nu există evaluări
- Ei1252 - Transducer EngineeringDocument18 paginiEi1252 - Transducer Engineeringguru.rjpmÎncă nu există evaluări
- Frequency Response of Discrete-Time Systems: OutlineDocument9 paginiFrequency Response of Discrete-Time Systems: OutlineWaqas QammarÎncă nu există evaluări
- Lesson1 GuncelDocument17 paginiLesson1 GuncelGe NÎncă nu există evaluări
- Eddy Probe System On The Basis of New Technology: FT L C L I T UDocument6 paginiEddy Probe System On The Basis of New Technology: FT L C L I T UNatthaphon NaosookÎncă nu există evaluări
- Mechatronics 2.3Document2 paginiMechatronics 2.3Rohan YadavÎncă nu există evaluări
- Measurement and Instrumentation Lab 1Document10 paginiMeasurement and Instrumentation Lab 1Mompati Letsweletse100% (1)
- Experiment Report: Characterizing Resonant Series RLC Circuits Using LabviewDocument15 paginiExperiment Report: Characterizing Resonant Series RLC Circuits Using LabviewPortia ShilengeÎncă nu există evaluări
- Types of Transducers and Their Applications: Instrumentation and Product TestingDocument31 paginiTypes of Transducers and Their Applications: Instrumentation and Product TestingvikasinmumbaiÎncă nu există evaluări
- Introduction To Sensors: Edited From: Sookram SobhanDocument52 paginiIntroduction To Sensors: Edited From: Sookram SobhanJongin KimÎncă nu există evaluări
- Synthesis of NetworksDocument50 paginiSynthesis of NetworksJosetheking CrackedsoftwaresÎncă nu există evaluări
- DCResistivity Measurement PDFDocument52 paginiDCResistivity Measurement PDFHaritsari DewiÎncă nu există evaluări
- Biomedical Instrumentation: Chapter 6 in Introduction To Biomedical Equipment Technology by Joseph Carr and John BrownDocument106 paginiBiomedical Instrumentation: Chapter 6 in Introduction To Biomedical Equipment Technology by Joseph Carr and John BrownGauri DÎncă nu există evaluări
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3De la EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3Evaluare: 3 din 5 stele3/5 (2)
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsDe la EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsÎncă nu există evaluări
- Some Case Studies on Signal, Audio and Image Processing Using MatlabDe la EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabÎncă nu există evaluări
- Observer-Based Super Twisting Sliding Mode Control For Fixed Wing Unmanned Aerial VehicleDocument6 paginiObserver-Based Super Twisting Sliding Mode Control For Fixed Wing Unmanned Aerial VehiclemailtosshettyÎncă nu există evaluări
- XM 60 SUNRIF Rev.11.0 PDFDocument2 paginiXM 60 SUNRIF Rev.11.0 PDFm_963934629Încă nu există evaluări
- Actuador Mod 3200Document19 paginiActuador Mod 3200Anonymous YmXY1bcÎncă nu există evaluări
- Manual de Conchas o Casquetes PDFDocument180 paginiManual de Conchas o Casquetes PDFJuan Carlos CamachoÎncă nu există evaluări
- Comparative Study of Seismic Analysis of Building With Light Weight and Conventional MaterialDocument4 paginiComparative Study of Seismic Analysis of Building With Light Weight and Conventional MaterialIJEMR JournalÎncă nu există evaluări
- Forward KinematicsDocument4 paginiForward KinematicsZafer Gök100% (1)
- Geotechnical Report and Foundation RecomendationDocument51 paginiGeotechnical Report and Foundation Recomendationh100% (1)
- Identification System Kks Chapter I KksDocument280 paginiIdentification System Kks Chapter I KksSupratim PalÎncă nu există evaluări
- 2018-2019 Exams STNHSDocument5 pagini2018-2019 Exams STNHSMajorica Cepeda MillanÎncă nu există evaluări
- Phenolphthalein NaOH KineticsDocument7 paginiPhenolphthalein NaOH KineticsjoevinngglÎncă nu există evaluări
- Mathematical Model of Inverted Pendulum SystemDocument18 paginiMathematical Model of Inverted Pendulum SystemMajid Mehmood100% (1)
- Envelope Acceleration LDocument10 paginiEnvelope Acceleration Lsumeet_soporiÎncă nu există evaluări
- Manoj 1Document73 paginiManoj 1ajayÎncă nu există evaluări
- Pla Sci Ze CatalogueDocument9 paginiPla Sci Ze CatalogueAdi SuwandiÎncă nu există evaluări
- MODULE 2 Forces and MotionDocument36 paginiMODULE 2 Forces and MotionCatherine LaraÎncă nu există evaluări
- Designers' Guide To Eurocode 2: Design of Concrete StructuresDocument242 paginiDesigners' Guide To Eurocode 2: Design of Concrete StructuresEmina LjubijankicÎncă nu există evaluări
- Finite Volume MethodDocument2 paginiFinite Volume MethodRhea MambaÎncă nu există evaluări
- Vinodhini B. - Mercury PorosimetryDocument35 paginiVinodhini B. - Mercury PorosimetryHarry JakeÎncă nu există evaluări
- Chemistry Investigatory ProjectDocument18 paginiChemistry Investigatory Projectvidhisha makenÎncă nu există evaluări
- Rodolfo Gambini - Lectures On Loop Quantum GravityDocument92 paginiRodolfo Gambini - Lectures On Loop Quantum GravityArsLexii100% (1)
- Jesper Andreasen Local VolatilityDocument55 paginiJesper Andreasen Local VolatilityAL RAFI0% (1)
- L1 Piles Subject To Lateral Soil MovementDocument32 paginiL1 Piles Subject To Lateral Soil Movementedward the iiiÎncă nu există evaluări
- Strategic Voting in TV Game Show "The Weakest Link"Document47 paginiStrategic Voting in TV Game Show "The Weakest Link"Abhishek BhasinÎncă nu există evaluări
- Drag ForceDocument7 paginiDrag ForceehsankotÎncă nu există evaluări
- Bruce R. Sutherland - Internal Gravity Waves-Cambridge University Press (2010) PDFDocument395 paginiBruce R. Sutherland - Internal Gravity Waves-Cambridge University Press (2010) PDFVAIBHAV SHUKLAÎncă nu există evaluări
- Comparison Between Experimental and Numerical Studies of Fully Encased Composite ColumnsDocument8 paginiComparison Between Experimental and Numerical Studies of Fully Encased Composite ColumnsAbdul BariÎncă nu există evaluări
- Schrodinger EquationsDocument3 paginiSchrodinger EquationsNatheesh TpÎncă nu există evaluări
- Anbearthretainingbs 8002 CalcsDocument16 paginiAnbearthretainingbs 8002 Calcsapi-305101869Încă nu există evaluări
- Chapter 7Document12 paginiChapter 7Saleha RidhoÎncă nu există evaluări
- Spreadsheet To Design SeparatorsDocument21 paginiSpreadsheet To Design Separatorssemarasik_651536604Încă nu există evaluări