S-ar putea să vă placă și
- Cuaderno de actividades prácticas en neurofacilitaciónDe la EverandCuaderno de actividades prácticas en neurofacilitaciónÎncă nu există evaluări
- Concepto Bobath A Propósito de Un Caso en Terapia OcupacionalDocument27 paginiConcepto Bobath A Propósito de Un Caso en Terapia OcupacionalclarafranÎncă nu există evaluări
- Caso BobathDocument27 paginiCaso BobathAgus SchÎncă nu există evaluări
- Teorías DEL Control Motor, Principios DE Aprendizaje Motor Y Concepto Bobath A Propósito de Un Caso en Terapia OcupacionalDocument27 paginiTeorías DEL Control Motor, Principios DE Aprendizaje Motor Y Concepto Bobath A Propósito de Un Caso en Terapia OcupacionalRodri MartínezÎncă nu există evaluări
- NDT Tto Del Neutodesarrollo LESLY JONDECDocument49 paginiNDT Tto Del Neutodesarrollo LESLY JONDECYasmin Bruno PhowellÎncă nu există evaluări
- Modelo Control Motor y Modelo RehabilitadorDocument14 paginiModelo Control Motor y Modelo RehabilitadorTiare MuñozÎncă nu există evaluări
- Control Motor Método BobathDocument6 paginiControl Motor Método BobathDomin BernaÎncă nu există evaluări
- NDT - Tto Del Neutodesarrollo - LESLY JONDECDocument49 paginiNDT - Tto Del Neutodesarrollo - LESLY JONDECLiMy Lizette Lujan100% (3)
- Traducido Sensorimotor Integration For Functional - En.esDocument17 paginiTraducido Sensorimotor Integration For Functional - En.esAlicia HernandezÎncă nu există evaluări
- Control Motor BeilaDocument4 paginiControl Motor Beilamaria liendoÎncă nu există evaluări
- Comparacion de Enfoques de TtoDocument9 paginiComparacion de Enfoques de TtoCarlos Andres Quiroz Mora100% (4)
- Capitulo 2.en - EsDocument16 paginiCapitulo 2.en - Esalexvargas1735Încă nu există evaluări
- Unidad de Aprendizaje 1 (Control Motor) - Tema 1Document7 paginiUnidad de Aprendizaje 1 (Control Motor) - Tema 1Jose Adrian Salazar CastroÎncă nu există evaluări
- Clase 4 Medicina Fisica - Control Motor y PosturalDocument22 paginiClase 4 Medicina Fisica - Control Motor y PosturalAlex XanderÎncă nu există evaluări
- Monografia To IDocument16 paginiMonografia To IAraceli Agustina RomanoÎncă nu există evaluări
- Concepto BobathDocument7 paginiConcepto BobathRaul Vieira VillarroelÎncă nu există evaluări
- Presentacion BobathDocument11 paginiPresentacion Bobathstefanyjhoanna100% (1)
- Bobath DefinicionDocument28 paginiBobath DefinicionManu SalinasÎncă nu există evaluări
- Unidad Tematica 1. Características Generales Del Control MotorDocument22 paginiUnidad Tematica 1. Características Generales Del Control MotorAlessia AndiaÎncă nu există evaluări
- CompendioDocument4 paginiCompendioFernando Pinto PatÎncă nu există evaluări
- TromblinDocument10 paginiTromblinElisa RossÎncă nu există evaluări
- Actividad 4Document4 paginiActividad 4Merary TrejoÎncă nu există evaluări
- Control MotorDocument9 paginiControl MotorVickyÎncă nu există evaluări
- 01b Marcos de Referencia en To CorregidoDocument15 pagini01b Marcos de Referencia en To CorregidoacalleramaÎncă nu există evaluări
- Psicopedagogía de La Educación Del Movimiento y Teorias Del Aprendizaje Motor Psic. EipeDocument4 paginiPsicopedagogía de La Educación Del Movimiento y Teorias Del Aprendizaje Motor Psic. Eipeabel carmona50% (2)
- NEUROFISIOLOGIA - Evaluacion BobathDocument18 paginiNEUROFISIOLOGIA - Evaluacion BobathCastañeda ManuelÎncă nu există evaluări
- Marcos y ModelosDocument5 paginiMarcos y ModelosJohana FerreroÎncă nu există evaluări
- Capítulo 1Document84 paginiCapítulo 1Walter PelaezÎncă nu există evaluări
- Resumen ModelosDocument35 paginiResumen ModelosDanii JimenezÎncă nu există evaluări
- Clase 1 BobathDocument51 paginiClase 1 BobathElena MoralesÎncă nu există evaluări
- Bases Neurofisiológicas Concepto BobathDocument2 paginiBases Neurofisiológicas Concepto BobathGAREB ARIOC NEFTALÍ GUTIÉRREZ PINO100% (3)
- Optimizacion Del Desempeño MotorDocument53 paginiOptimizacion Del Desempeño MotorNatalia Toledo MasíasÎncă nu există evaluări
- CAP 14 Ejerc Terapeutico. (FNP)Document20 paginiCAP 14 Ejerc Terapeutico. (FNP)OLGA GIRALDO100% (3)
- Control MotorDocument3 paginiControl MotorMeilyÎncă nu există evaluări
- Marcos de ReferenciaDocument10 paginiMarcos de ReferenciaAzucena LópezÎncă nu există evaluări
- 9.métodos Específicos de Intervención en NeurorehabilitaciónDocument38 pagini9.métodos Específicos de Intervención en NeurorehabilitaciónDustin NuñezÎncă nu există evaluări
- Tecnicas en Neurorehabilitacion Que Se Emplean en El Control PosturalDocument14 paginiTecnicas en Neurorehabilitacion Que Se Emplean en El Control PosturalJefferAronesÎncă nu există evaluări
- Annotated-Control de Lectura Lb2 Conexionismo..Document1 paginăAnnotated-Control de Lectura Lb2 Conexionismo..Christopher Brayan Villanueva EspinozaÎncă nu există evaluări
- Concepto BobathDocument6 paginiConcepto BobathYaritza BedoyaÎncă nu există evaluări
- NDT BonnyDocument23 paginiNDT BonnyLiMy Lizette LujanÎncă nu există evaluări
- Marcos de ReferenciaDocument5 paginiMarcos de ReferenciaEmi MedinaÎncă nu există evaluări
- Marcos de Referencia TODFDocument14 paginiMarcos de Referencia TODFFlavia ayalaÎncă nu există evaluări
- Clase Bobath, Vojta, IS 2023Document51 paginiClase Bobath, Vojta, IS 2023Reinaldo SelaiveÎncă nu există evaluări
- MÉTODO BOBATH AplicacionesDocument3 paginiMÉTODO BOBATH Aplicacionesesedisambul100% (2)
- Guia Teorias de MovimientoDocument3 paginiGuia Teorias de MovimientoSofia GuascaÎncă nu există evaluări
- Módulo 9Document33 paginiMódulo 9Karina Lara VilchesÎncă nu există evaluări
- Definicion de NDTDocument8 paginiDefinicion de NDTMichelle Rocio Avellaneda100% (1)
- BOBATHDocument4 paginiBOBATHfergiesc6454Încă nu există evaluări
- Definicion de NDTDocument8 paginiDefinicion de NDTkarlha coronado calderonÎncă nu există evaluări
- Control Motor 2Document65 paginiControl Motor 2Walo LoKo AlfaroÎncă nu există evaluări
- Metodo BobathDocument4 paginiMetodo BobathcarlushÎncă nu există evaluări
- Teorias Control MotorDocument47 paginiTeorias Control MotorMarcela Andrea100% (1)
- Concepto BobathDocument21 paginiConcepto BobathPhysio CmmÎncă nu există evaluări
- Modelo Control MotorDocument3 paginiModelo Control MotorMakarena Diaz Alfaro0% (1)
- Teorias Del Control MotorDocument7 paginiTeorias Del Control MotorDiego Noroña GarcíaÎncă nu există evaluări
- Fisioterapia en salud mentalDe la EverandFisioterapia en salud mentalEvaluare: 3.5 din 5 stele3.5/5 (2)
- La coordinación y el entrenamiento propioceptivo (Bicolor)De la EverandLa coordinación y el entrenamiento propioceptivo (Bicolor)Evaluare: 5 din 5 stele5/5 (3)
- LA CIENCIA DEL CAMBIO EN 4 PASOS: Estrategias y técnicas operativas para entender cómo producir cambios significativos en tu vida y mantenerlos en el tiempoDe la EverandLA CIENCIA DEL CAMBIO EN 4 PASOS: Estrategias y técnicas operativas para entender cómo producir cambios significativos en tu vida y mantenerlos en el tiempoÎncă nu există evaluări
- Equilibrio Humano y Control de La Postura de Pie y CaminandoDocument27 paginiEquilibrio Humano y Control de La Postura de Pie y CaminandoDiego Noroña GarcíaÎncă nu există evaluări
- Teorias Del Control MotorDocument7 paginiTeorias Del Control MotorDiego Noroña GarcíaÎncă nu există evaluări
- Mecanismo Control Postural1Document12 paginiMecanismo Control Postural1Patribonita100% (1)
- Conceptos Basicos PCDocument13 paginiConceptos Basicos PCDiego Noroña GarcíaÎncă nu există evaluări
- Control PosturalDocument22 paginiControl PosturalDiego Noroña GarcíaÎncă nu există evaluări
- Paralisis Cerebral, Conceptos ActualesDocument21 paginiParalisis Cerebral, Conceptos ActualesDiego Noroña García0% (1)
- Desarrollo MotorDocument33 paginiDesarrollo MotorDiego Noroña GarcíaÎncă nu există evaluări
- Control Nervioso Sistema MotorDocument33 paginiControl Nervioso Sistema MotorDiego Noroña GarcíaÎncă nu există evaluări
- Charla EspasticidadDocument35 paginiCharla EspasticidadDiego Noroña GarcíaÎncă nu există evaluări
- Articulo RevistaDocument4 paginiArticulo RevistaDiego Noroña GarcíaÎncă nu există evaluări
- YanakonaDocument98 paginiYanakonaAngela WhsmÎncă nu există evaluări
- Tema2 EcosistemasDocument3 paginiTema2 EcosistemasPaola Caballero FuentesÎncă nu există evaluări
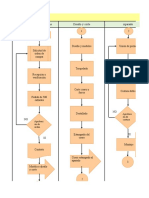
- Diagrama de FlujoDocument16 paginiDiagrama de FlujoJaneth VasquezÎncă nu există evaluări
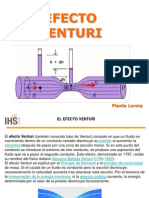
- Efecto VenturiDocument5 paginiEfecto VenturiautomotivableÎncă nu există evaluări
- Calibres DigitalesDocument4 paginiCalibres DigitalesTecnicas Reunidas de AutomociónÎncă nu există evaluări
- Civil, Branly (1 Juegos)Document24 paginiCivil, Branly (1 Juegos)Andree CamposecoÎncă nu există evaluări
- Jalpa MendezDocument1 paginăJalpa MendezEnrique de la Cruz RomeroÎncă nu există evaluări
- Articulo Cientifico Motivación y Proceso de Aprendizaje de La EscrituraDocument6 paginiArticulo Cientifico Motivación y Proceso de Aprendizaje de La EscriturawendyÎncă nu există evaluări
- Método de ChowDocument183 paginiMétodo de ChowsapweroÎncă nu există evaluări
- Informe PermeabilidadDocument15 paginiInforme PermeabilidadPersie MendozaÎncă nu există evaluări
- 6to CuestionarioDocument3 pagini6to CuestionarioNicole MartinezÎncă nu există evaluări
- Fase 3 - Trabajo Colaborativo - Grupo. 551113 - 1 PDFDocument26 paginiFase 3 - Trabajo Colaborativo - Grupo. 551113 - 1 PDFFlor Yadira Moreno GarzonÎncă nu există evaluări
- Modelo Malcom BaldrigeDocument13 paginiModelo Malcom Baldrigekahhdjak sfkaÎncă nu există evaluări
- Cuadro Sinoptico Terapia ConductualDocument10 paginiCuadro Sinoptico Terapia ConductualalejandraÎncă nu există evaluări
- Hoja de Vida ENFERMERADocument2 paginiHoja de Vida ENFERMERAMiscelanea OasisÎncă nu există evaluări
- Guia de Conversion Portafolio ShellDocument9 paginiGuia de Conversion Portafolio Shellaj912589Încă nu există evaluări
- Evidencia Estudio Caso Disenar Base Datos Relacional para Una EmpresaDocument3 paginiEvidencia Estudio Caso Disenar Base Datos Relacional para Una EmpresaJuanita OrjuelaÎncă nu există evaluări
- Unidades Estrategicas de NegociosDocument8 paginiUnidades Estrategicas de NegociosyeikerÎncă nu există evaluări
- Thoreau - La Sucesion de Los Arboles ForestalesDocument54 paginiThoreau - La Sucesion de Los Arboles ForestalesdiegoklaresÎncă nu există evaluări
- Instructivo - Aulas Digitales Móviles 2017Document29 paginiInstructivo - Aulas Digitales Móviles 2017Pedro MartinezÎncă nu există evaluări
- Avanti 2.0Document7 paginiAvanti 2.0jpabloextÎncă nu există evaluări
- Tabla de Pociones y Objetos Alquimicos PDFDocument2 paginiTabla de Pociones y Objetos Alquimicos PDFCarlos Eduardo CAÎncă nu există evaluări
- Contabilidad de Costos DefinicionesDocument4 paginiContabilidad de Costos DefinicionesCornelia Isuiza AmasifuenÎncă nu există evaluări
- 8 PPT CulturaDocument18 pagini8 PPT CulturaFrancisca VelasquezÎncă nu există evaluări
- Reglas de Operacion 2020Document4 paginiReglas de Operacion 2020Fomento Económico De Chiapas ACÎncă nu există evaluări
- McarrDocument13 paginiMcarrBeatriz GarcíaÎncă nu există evaluări
- 04 Eu A4 Aquarea Smart Cloud 17 050916-Ensp-1610111-R1Document2 pagini04 Eu A4 Aquarea Smart Cloud 17 050916-Ensp-1610111-R1Pilar SanchezÎncă nu există evaluări
- Teatro de Objetos DocumentalesDocument6 paginiTeatro de Objetos Documentalesjuan acuñaÎncă nu există evaluări
- Tractores Topadores - Procedimientos de Arranque y ParadaDocument2 paginiTractores Topadores - Procedimientos de Arranque y ParadaJean Pierre Zela QuispeÎncă nu există evaluări