S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Smart Vehicular Safety SystemDocument14 paginiSmart Vehicular Safety SystemGowsalya GowsÎncă nu există evaluări
- The Design Seismic Coefficient of The Embedding Foundation of Building StructuresDocument9 paginiThe Design Seismic Coefficient of The Embedding Foundation of Building StructuresWaldemar Cepeda MurilloÎncă nu există evaluări
- Product Card R-200 ADV RU D1Document2 paginiProduct Card R-200 ADV RU D1zhukzhukovskyÎncă nu există evaluări
- Fisher Fieldbus6200Document340 paginiFisher Fieldbus6200Arun KumarÎncă nu există evaluări
- EBE Electronic EngineeringDocument51 paginiEBE Electronic EngineeringImisebe TelecomsÎncă nu există evaluări
- LT 3 - Nuclear ChemDocument2 paginiLT 3 - Nuclear Chemaj eneriaÎncă nu există evaluări
- 8.2 Voltage Dependent Relay Coordination PDFDocument9 pagini8.2 Voltage Dependent Relay Coordination PDFhussainÎncă nu există evaluări
- CT PTDocument20 paginiCT PTtalha0703097100% (1)
- ME730A - Modal Analysis: Theory and PracticeDocument5 paginiME730A - Modal Analysis: Theory and PracticePankaj KumarÎncă nu există evaluări
- VIZIOTRAININGGNPSC10Document122 paginiVIZIOTRAININGGNPSC10slowend100% (1)
- Otn Fec Po Opt TM AeDocument1 paginăOtn Fec Po Opt TM Aenobita3Încă nu există evaluări
- Audio UnitsDocument3 paginiAudio Unitsjoosh908Încă nu există evaluări
- Report On State Estimator PublicDocument160 paginiReport On State Estimator Publickrcdewanew100% (1)
- Manual HoneywellDocument126 paginiManual HoneywellAlejandro Ramirez MoralesÎncă nu există evaluări
- Ground Fault ProtectionDocument60 paginiGround Fault ProtectiondallabragÎncă nu există evaluări
- Panasonic TX-L24C3BDocument80 paginiPanasonic TX-L24C3BLeonardo PradoÎncă nu există evaluări
- PicEngrave Pro TutorialDocument7 paginiPicEngrave Pro Tutorialthanh_cdt01Încă nu există evaluări
- Automatic Control (ME1401)Document2 paginiAutomatic Control (ME1401)Mehroos AliÎncă nu există evaluări
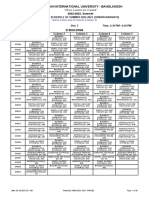
- Day 3 Slot 3 Mid Sm23 SummerDocument32 paginiDay 3 Slot 3 Mid Sm23 SummerNayeem SarkarÎncă nu există evaluări
- Lecture 2 High Level Vs Low Level LanguagesDocument5 paginiLecture 2 High Level Vs Low Level Languagesapi-3739389100% (2)
- S. No Sales Invopanel Date Order No. Sub Order Customer NameDocument75 paginiS. No Sales Invopanel Date Order No. Sub Order Customer NameDeepesh AgarwalÎncă nu există evaluări
- Unit 2 Wearable SystemsDocument54 paginiUnit 2 Wearable SystemsSwarubini PJ100% (1)
- Canadian Solar 285 Watt Panel CS6X-285PDocument3 paginiCanadian Solar 285 Watt Panel CS6X-285PTanneru Hemanth KumarÎncă nu există evaluări
- Inst PrabhaDocument29 paginiInst Prabharaj guptaÎncă nu există evaluări
- Design and Embedded Control SystemsDocument267 paginiDesign and Embedded Control Systemsgomesjunior2002Încă nu există evaluări
- Astm E-322Document3 paginiAstm E-322LoriGalbanus100% (1)
- Tekmar 314 tN2 Wiring Center - Four Zone PumpsDocument8 paginiTekmar 314 tN2 Wiring Center - Four Zone Pumpse-ComfortUSAÎncă nu există evaluări
- Installation and operation guide for CNC machineDocument7 paginiInstallation and operation guide for CNC machineMd. Atiqur Rahman TalukdarÎncă nu există evaluări
- Ikw75n60t TeslaDocument14 paginiIkw75n60t TeslaRaduÎncă nu există evaluări
- W3000PH Wi-Fi Storage Device User ManualDocument16 paginiW3000PH Wi-Fi Storage Device User ManualAbdul MateenÎncă nu există evaluări