S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Satellite Communication - VIT - 6Document20 paginiSatellite Communication - VIT - 6MugelanÎncă nu există evaluări
- Eaglet KK 24inDocument7 paginiEaglet KK 24inAnonymous J1sELDp7Încă nu există evaluări
- Erj 170-190 Mmel Faa Rev 9Document139 paginiErj 170-190 Mmel Faa Rev 9mh.hiliryÎncă nu există evaluări
- Balance Chart Design CourseDocument79 paginiBalance Chart Design CourseRandy BabÎncă nu există evaluări
- Snyder 2006Document21 paginiSnyder 2006gfsdg dfgÎncă nu există evaluări
- Aerospace Job Interview Preparation GuideDocument7 paginiAerospace Job Interview Preparation GuideBoyÎncă nu există evaluări
- TDR 94 5230775652Document262 paginiTDR 94 5230775652escribedecr100% (5)
- Level 4 CevapAADocument27 paginiLevel 4 CevapAASerkan Öztürk100% (1)
- Avionics Question Bank and NotesDocument85 paginiAvionics Question Bank and NotesFaisal Muhammed MavathuÎncă nu există evaluări
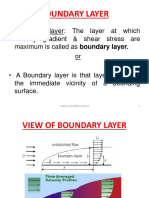
- Boundary LayerDocument16 paginiBoundary LayerAmaterasu Susanoo TsukuyomiÎncă nu există evaluări
- Getting To Grips With Fatigue and Alernetss Management PDFDocument199 paginiGetting To Grips With Fatigue and Alernetss Management PDFVictor Borioli Yancovitz100% (1)
- Aircraft Control SystemsDocument97 paginiAircraft Control SystemsSanjay Singh100% (2)
- Copia Del Certificado de Tipo de La Aeronave Con Sus Hojas de DatosDocument6 paginiCopia Del Certificado de Tipo de La Aeronave Con Sus Hojas de DatosGustavo SilvaÎncă nu există evaluări
- MB Luftwaffe Secret Wings Third ReichDocument132 paginiMB Luftwaffe Secret Wings Third ReichSebastián R Manríquez B94% (17)
- Aerodrome Survey Manual AAI 220114 PDFDocument166 paginiAerodrome Survey Manual AAI 220114 PDFArun JayankondanÎncă nu există evaluări
- PropertiesDocument10 paginiPropertiesAhmad SalahÎncă nu există evaluări
- ResumeDocument2 paginiResumemalikmehnazÎncă nu există evaluări
- Final RepoFinal Report Bird Strike Studyrt Bird Strike StudyDocument181 paginiFinal RepoFinal Report Bird Strike Studyrt Bird Strike StudyMona RaftariÎncă nu există evaluări
- Jeppview For Windows: List of Pages in This Trip KitDocument159 paginiJeppview For Windows: List of Pages in This Trip KitarciuaÎncă nu există evaluări
- Aircraft Manual - Lockheed SR-71A-1 - Flight Manual PDFDocument1.012 paginiAircraft Manual - Lockheed SR-71A-1 - Flight Manual PDFJose Sanchez100% (7)
- Jeppview For Windows: General Information General InformationDocument19 paginiJeppview For Windows: General Information General InformationAleksandar StjepanovicÎncă nu există evaluări
- Vintage Airplane - Sep 2010Document44 paginiVintage Airplane - Sep 2010Aviation/Space History Library100% (1)
- User Guide: in Memoriam Sergey KubyshkinDocument22 paginiUser Guide: in Memoriam Sergey KubyshkinJuanCarlosArcilaRiosÎncă nu există evaluări
- Supersonic BiplaneDocument3 paginiSupersonic BiplaneOBRIAN MARARIRAÎncă nu există evaluări
- XFOILDocument2 paginiXFOILbwwatsonÎncă nu există evaluări
- PDFDocument2 paginiPDFamiry1373Încă nu există evaluări
- 10AE62 - Aircraft Performance PDFDocument2 pagini10AE62 - Aircraft Performance PDFBhanu Pratap SinghÎncă nu există evaluări
- EASA OEB Final Report EC - 120 16052012Document25 paginiEASA OEB Final Report EC - 120 16052012Kastor ROÎncă nu există evaluări
- Army Aviation Digest - Jun 1962Document52 paginiArmy Aviation Digest - Jun 1962Aviation/Space History LibraryÎncă nu există evaluări
- Embraer Brochura KC-390 enDocument40 paginiEmbraer Brochura KC-390 enManuel Morales100% (1)