S-ar putea să vă placă și
- Detail Waktu - Per Tim DisiplinDocument1 paginăDetail Waktu - Per Tim DisiplinYuda SatriaÎncă nu există evaluări
- 9200 9P 006 - R2Document34 pagini9200 9P 006 - R2Yuda SatriaÎncă nu există evaluări
- 9200 9P 007 - R1Document25 pagini9200 9P 007 - R1Yuda SatriaÎncă nu există evaluări
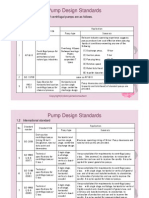
- Pump Standards ComparisonDocument4 paginiPump Standards ComparisonAnish Dani50% (2)
- 9200 9P 009 - R1Document14 pagini9200 9P 009 - R1Yuda SatriaÎncă nu există evaluări
- 9200 9P 005 - R2Document23 pagini9200 9P 005 - R2Yuda Satria100% (1)
- CONOCO PHILLIPS SpecDocument21 paginiCONOCO PHILLIPS SpecYuda Satria100% (1)
- Asme InterpretationDocument72 paginiAsme Interpretationbbmoksh100% (2)
- 9200 9L 039 - R2Document17 pagini9200 9L 039 - R2Yuda SatriaÎncă nu există evaluări
- 9200 9L 039 - R2Document17 pagini9200 9L 039 - R2Yuda SatriaÎncă nu există evaluări
- Toyo 1-55Document435 paginiToyo 1-55Yuda Satria100% (1)
- Asme b18.2.3Document19 paginiAsme b18.2.3amrandconanÎncă nu există evaluări
- Toyo 56-87Document123 paginiToyo 56-87Yuda SatriaÎncă nu există evaluări
- Asme 1 CodesDocument3 paginiAsme 1 CodesmilesmiconÎncă nu există evaluări
- Appendix I - Mandatory Preparation of Technical Inquiries To TheDocument1 paginăAppendix I - Mandatory Preparation of Technical Inquiries To TheJason501Încă nu există evaluări
- Asme11 SummaryDocument4 paginiAsme11 SummaryAlfredo MedinaÎncă nu există evaluări
- Sec 1 PT PWT PDFDocument7 paginiSec 1 PT PWT PDFYuda SatriaÎncă nu există evaluări
- Stds XrefDocument2 paginiStds XrefAnonymous qhVGVpÎncă nu există evaluări
- Asme V Si UnitsDocument3 paginiAsme V Si UnitsvidhisukhadiyaÎncă nu există evaluări
- Test Standard Benefits ArticleDocument8 paginiTest Standard Benefits Articleverat81Încă nu există evaluări
- Part PR Requirements For Boilers Fabricated by RivetingDocument1 paginăPart PR Requirements For Boilers Fabricated by RivetingYuda SatriaÎncă nu există evaluări
- Pump Standards ComparisonDocument4 paginiPump Standards ComparisonAnish Dani50% (2)
- H 99 Sec 3 NF 5000Document4 paginiH 99 Sec 3 NF 5000Yuda SatriaÎncă nu există evaluări
- Appendix I - Mandatory Preparation of Technical Inquiries To TheDocument1 paginăAppendix I - Mandatory Preparation of Technical Inquiries To TheJason501Încă nu există evaluări
- Appendix Nf-I: (In The Course of Preparation)Document2 paginiAppendix Nf-I: (In The Course of Preparation)Yuda SatriaÎncă nu există evaluări
- ARTICLE NF-8000 Certificates of Authorization and Certificates of ConformanceDocument2 paginiARTICLE NF-8000 Certificates of Authorization and Certificates of ConformanceYuda SatriaÎncă nu există evaluări
- Asme V Si UnitsDocument3 paginiAsme V Si UnitsvidhisukhadiyaÎncă nu există evaluări
- Asme11 SummaryDocument4 paginiAsme11 SummaryAlfredo MedinaÎncă nu există evaluări
- H99appnf IIDocument2 paginiH99appnf IIYuda SatriaÎncă nu există evaluări
- Sec3ne 6000Document6 paginiSec3ne 6000Yuda SatriaÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Dgca Module 3 Part 04Document32 paginiDgca Module 3 Part 04Uttam100% (1)
- Ac Circuit Simulation: i (t) =I sin (ωt) =I si n (2 π f t)Document4 paginiAc Circuit Simulation: i (t) =I sin (ωt) =I si n (2 π f t)M.USMAN BIN AHMEDÎncă nu există evaluări
- Electrical SteelDocument13 paginiElectrical SteelAgustine SetiawanÎncă nu există evaluări
- Test Report of Generator Protection RELAY (87G - G60) D18T PANELDocument5 paginiTest Report of Generator Protection RELAY (87G - G60) D18T PANELMohan RajÎncă nu există evaluări
- BS en 61810-7-2006Document92 paginiBS en 61810-7-2006FilipeFerreiraÎncă nu există evaluări
- Direct and Inverse Variation Worksheet - (SISeaf73d778eab)Document3 paginiDirect and Inverse Variation Worksheet - (SISeaf73d778eab)RusherÎncă nu există evaluări
- Duogen Technical Documentation PDFDocument29 paginiDuogen Technical Documentation PDFvassindouÎncă nu există evaluări
- Serial Communication MFM384-C: Operating Instructions Outline Dimensions (In MM) Panel Cutout Dimensions (In MM)Document4 paginiSerial Communication MFM384-C: Operating Instructions Outline Dimensions (In MM) Panel Cutout Dimensions (In MM)Nirmalya PalÎncă nu există evaluări
- Lecture 1 Introduction To DC Motor DrivesDocument22 paginiLecture 1 Introduction To DC Motor DrivesNovic JohnsÎncă nu există evaluări
- Datasheet Cd4066Document10 paginiDatasheet Cd4066Luis LunaÎncă nu există evaluări
- Indian Institute of Information Technology Pune: Semester III Semester IVDocument1 paginăIndian Institute of Information Technology Pune: Semester III Semester IVRupesh GuravÎncă nu există evaluări
- 3SB5 LPBSDocument32 pagini3SB5 LPBSMurtuzaÎncă nu există evaluări
- Electrical TenderDocument35 paginiElectrical Tendermohan babuÎncă nu există evaluări
- Engineers, I Need Advice, Please Help - Tripping of MV Switchgear When Transformer Breaker Is Closed in The RMUDocument8 paginiEngineers, I Need Advice, Please Help - Tripping of MV Switchgear When Transformer Breaker Is Closed in The RMUAbdulyunus AmirÎncă nu există evaluări
- 1vap428601-Db SCVDocument4 pagini1vap428601-Db SCVSajid KhanÎncă nu există evaluări
- Repulsion CoilDocument6 paginiRepulsion CoilJim100% (1)
- Et200sp Ai Energymeter 400vac ST Manual en-US en-USDocument97 paginiEt200sp Ai Energymeter 400vac ST Manual en-US en-USHélio Dos SantosÎncă nu există evaluări
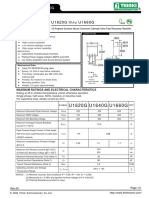
- Datasheet PDFDocument2 paginiDatasheet PDFEka Hikmah PratiwiÎncă nu există evaluări
- Service Manual: Digital HD Videocassette RecorderDocument78 paginiService Manual: Digital HD Videocassette RecorderthewarapperumaiuÎncă nu există evaluări
- Science-9 Q4 W7 D2Document5 paginiScience-9 Q4 W7 D2Johnrey PovadoraÎncă nu există evaluări
- 2.16 Transformer Polarity: Transformers: Basics, Maintenance, and DiagnosticsDocument12 pagini2.16 Transformer Polarity: Transformers: Basics, Maintenance, and Diagnosticselectrical zuhairÎncă nu există evaluări
- TP48200A-HX09A1 and TBC300A-DCA5 Telecom Power User ManualDocument95 paginiTP48200A-HX09A1 and TBC300A-DCA5 Telecom Power User ManualALexÎncă nu există evaluări
- Requirement of Protection Systems Engineering: Knowledge Management SystemDocument27 paginiRequirement of Protection Systems Engineering: Knowledge Management SystemSamÎncă nu există evaluări
- SH Na 3181-FDocument123 paginiSH Na 3181-FnagamabhishekÎncă nu există evaluări
- The Bubba OscillatorDocument7 paginiThe Bubba OscillatorMihai ManeaÎncă nu există evaluări
- SGDH Part Number GuideDocument12 paginiSGDH Part Number GuidecoronaqcÎncă nu există evaluări
- Record Plus Catalogue 9 RD5 RD6 RCD RelayDocument2 paginiRecord Plus Catalogue 9 RD5 RD6 RCD RelayJosett LPÎncă nu există evaluări
- Corporation: Pre-Trimmed IC Voltage Controlled AmplifiersDocument8 paginiCorporation: Pre-Trimmed IC Voltage Controlled AmplifiersJuan CarlosÎncă nu există evaluări
- Tesla Coils Polycontrast Interference Photography (Goran Marjanovic)Document3 paginiTesla Coils Polycontrast Interference Photography (Goran Marjanovic)THE NIKOLA TESLA INSTITUTE100% (2)
- Exp5 PrelabDocument3 paginiExp5 PrelabbkiremitciÎncă nu există evaluări