S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Q.No. Type Section Key/Range MarksDocument3 paginiQ.No. Type Section Key/Range MarksUtpal DasÎncă nu există evaluări
- Ec 2013 PDFDocument76 paginiEc 2013 PDFUtpal DasÎncă nu există evaluări
- Q.No. Type Section Key/Range MarksDocument3 paginiQ.No. Type Section Key/Range MarksUtpal DasÎncă nu există evaluări
- Q.No. Type Section Key/Range MarksDocument3 paginiQ.No. Type Section Key/Range MarksUtpal DasÎncă nu există evaluări
- Build Your First IOT Project With Arduino: Step 1: Assemble The Circuit and Interface With ArduinoDocument8 paginiBuild Your First IOT Project With Arduino: Step 1: Assemble The Circuit and Interface With ArduinoUtpal DasÎncă nu există evaluări
- Genetic Algorithm Programming in MATLAB 7.0Document6 paginiGenetic Algorithm Programming in MATLAB 7.0Ananth VelmuruganÎncă nu există evaluări
- Computational Methods in SPDocument1 paginăComputational Methods in SPUtpal DasÎncă nu există evaluări
- Fundamentals of Statistical Signal Processing by DR Steven KayDocument25 paginiFundamentals of Statistical Signal Processing by DR Steven KayUtpal DasÎncă nu există evaluări
- Ka'ma (Longing For Physicality), Krodha (Anger), Lobha (Avarice), Mada (Vanity), Moha (Blind Attachment), and Ma'tsarya (Jealousy)Document1 paginăKa'ma (Longing For Physicality), Krodha (Anger), Lobha (Avarice), Mada (Vanity), Moha (Blind Attachment), and Ma'tsarya (Jealousy)Utpal DasÎncă nu există evaluări
- ECE545 Lecture5 Dataflow 6Document15 paginiECE545 Lecture5 Dataflow 6Utpal DasÎncă nu există evaluări
- Short Time Fourier TransformDocument39 paginiShort Time Fourier TransformKishore MylavarapuÎncă nu există evaluări
- Accurate Angle-of-Arrival Measurement Using Particle Swarm OptimizationDocument7 paginiAccurate Angle-of-Arrival Measurement Using Particle Swarm OptimizationUtpal DasÎncă nu există evaluări
- Besu Book Fair - 2013Document1 paginăBesu Book Fair - 2013Utpal DasÎncă nu există evaluări
- Programming The Microprocessor: A Course in Microprocessor Electrical Engineering Dept. University of IndonesiaDocument38 paginiProgramming The Microprocessor: A Course in Microprocessor Electrical Engineering Dept. University of IndonesiaUtpal DasÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Code EngineDocument33 paginiCode EngineRôpíp PhanÎncă nu există evaluări
- CS6303 - Load Testing - Prelim Exam - Attempt ReviewDocument20 paginiCS6303 - Load Testing - Prelim Exam - Attempt ReviewLolita CrebilloÎncă nu există evaluări
- Course EMF TPTDocument63 paginiCourse EMF TPTPopescu AndreeaÎncă nu există evaluări
- Maintaining and Repairing Computer Systems and EquipmentDocument4 paginiMaintaining and Repairing Computer Systems and EquipmentLuis RodríguezÎncă nu există evaluări
- Mil STD 1456aDocument31 paginiMil STD 1456aenginÎncă nu există evaluări
- Case Study On Cloud SecurityDocument11 paginiCase Study On Cloud SecurityJohn Singh100% (1)
- Devops Awards Fullebook FinalDocument28 paginiDevops Awards Fullebook Finalsama akramÎncă nu există evaluări
- 1oo1, 1oo2, 2oo2, 2oo3 Voting Logics in Safety Instrumented System (SIS) - Safety Instrumented System - SIS - Instrumentation Forum PDFDocument2 pagini1oo1, 1oo2, 2oo2, 2oo3 Voting Logics in Safety Instrumented System (SIS) - Safety Instrumented System - SIS - Instrumentation Forum PDFNadi Jothidan KLÎncă nu există evaluări
- CV Annurawat ApcDocument4 paginiCV Annurawat ApcAnnuRawatÎncă nu există evaluări
- Python Course SyllabusDocument5 paginiPython Course Syllabusravikumar lankaÎncă nu există evaluări
- Module 1 Lesson 1Document26 paginiModule 1 Lesson 1Erza LeeÎncă nu există evaluări
- Minor Project Report Format ItDocument5 paginiMinor Project Report Format Itnamrata5555100% (1)
- Module IVDocument82 paginiModule IVGokul PradeepÎncă nu există evaluări
- What Is Scope Resolution in Python?Document2 paginiWhat Is Scope Resolution in Python?ameetamarwadiÎncă nu există evaluări
- ScadaDocument20 paginiScadaMandeep G KashyapÎncă nu există evaluări
- SR22 - EngineDocument14 paginiSR22 - EngineJoao AlmeidaÎncă nu există evaluări
- Motores AcerDocument38 paginiMotores AcerRocky Diego Chegne Salazar95% (39)
- Introduction To Programming: Mr. Imran Lecturer, Department of Computer Science, Jahan University Kabul, AfghanistanDocument21 paginiIntroduction To Programming: Mr. Imran Lecturer, Department of Computer Science, Jahan University Kabul, AfghanistanBaktash AhmadiÎncă nu există evaluări
- 1939 Autolite Parts OcrDocument154 pagini1939 Autolite Parts Ocrmykes47Încă nu există evaluări
- Book 5 Binary ExploitationDocument3 paginiBook 5 Binary ExploitationDaniel Suárez MartínezÎncă nu există evaluări
- Lean Manufacturing, SummaryDocument5 paginiLean Manufacturing, Summaryleonard241531Încă nu există evaluări
- Chapter 3: Processes: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionDocument38 paginiChapter 3: Processes: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionAbdullah MalikÎncă nu există evaluări
- Example Iso 27001 27002 Policies StandardsDocument23 paginiExample Iso 27001 27002 Policies StandardsSudhanshu Kumar Sinha100% (1)
- Cummins Power Hour - ParallelingTopologies - Uptime InstituteDocument42 paginiCummins Power Hour - ParallelingTopologies - Uptime InstituteasuhuaneÎncă nu există evaluări
- PDCDocument2 paginiPDCSyed Wyle MustafaÎncă nu există evaluări
- Comparison Between SAP IM - WM - Lean WM - DWM - EWMDocument4 paginiComparison Between SAP IM - WM - Lean WM - DWM - EWMSebastian BravoÎncă nu există evaluări
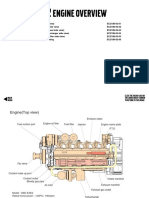
- Engine Overview: Click The Volvo-Logo in The Lower Right Corner To Return To This Menu Main MenuDocument7 paginiEngine Overview: Click The Volvo-Logo in The Lower Right Corner To Return To This Menu Main Menuwafdhiel jokam100% (2)
- SIL CertificateDocument6 paginiSIL CertificateHOOMAN afaghiÎncă nu există evaluări
- Manual Testing Real Time Qns & AnsDocument16 paginiManual Testing Real Time Qns & AnsjagannathÎncă nu există evaluări
- Implementation of Fault Tolerance in Earliest Deadline First (Edf) Scheduling Algorithm Domain: Embedded SystemDocument26 paginiImplementation of Fault Tolerance in Earliest Deadline First (Edf) Scheduling Algorithm Domain: Embedded SystemsnehaÎncă nu există evaluări