S-ar putea să vă placă și
- IRobot Roomba 400 ManualDocument28 paginiIRobot Roomba 400 ManualdameddyÎncă nu există evaluări
- Mach3 Manual StrungDocument137 paginiMach3 Manual StrungGhinet Marius100% (1)
- Chainsaw 2Document38 paginiChainsaw 2api-327922773Încă nu există evaluări
- Asahi TestDocument15 paginiAsahi TestdÎncă nu există evaluări
- TTD2400 USB Service ManualDocument32 paginiTTD2400 USB Service ManualTeodora DemianÎncă nu există evaluări
- Self-Aligning Bearing Units NTN-SNRDocument125 paginiSelf-Aligning Bearing Units NTN-SNRDenis DavydovÎncă nu există evaluări
- 4808 - Omega 4654 Movement Tech SheetsDocument7 pagini4808 - Omega 4654 Movement Tech SheetsMelina MaurerÎncă nu există evaluări
- Sega Genesis Controller Arduino CodeDocument2 paginiSega Genesis Controller Arduino CodeBecky Patton100% (1)
- Ford Fusion Hybrid Workshop Repair and Service ManualDocument1 paginăFord Fusion Hybrid Workshop Repair and Service Manualerwin_teichmannÎncă nu există evaluări
- 2001 Headshok Bearing Migration Inspection Instructions enDocument2 pagini2001 Headshok Bearing Migration Inspection Instructions enMohamed Abdel HamidÎncă nu există evaluări
- N05a SeriesDocument5 paginiN05a SeriesRoni0% (2)
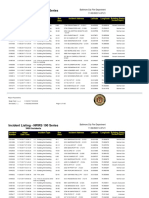
- 2017 - 2022 Baltimore City FiresDocument153 pagini2017 - 2022 Baltimore City FiresChris Berinato100% (2)
- King's Fine Woodworking Species Fact SheetDocument2 paginiKing's Fine Woodworking Species Fact SheetDGÎncă nu există evaluări
- Accuset 1000 User ManualDocument2 paginiAccuset 1000 User ManualNabi Diassé TangaraÎncă nu există evaluări
- Classic Boston Whalers 16&17 ModelsDocument8 paginiClassic Boston Whalers 16&17 ModelsCharlie BaconÎncă nu există evaluări
- Alienware m17x r3 Service Manual en UsDocument110 paginiAlienware m17x r3 Service Manual en UsAlexis SacarelisÎncă nu există evaluări
- April May - 2012 3Document10 paginiApril May - 2012 3khatru999Încă nu există evaluări
- TM 11-338 Telephone Office Central Office Set TC-10Document168 paginiTM 11-338 Telephone Office Central Office Set TC-10AdvocateÎncă nu există evaluări
- Rt22-652 Dishwasher c978Document4 paginiRt22-652 Dishwasher c978pasantitoÎncă nu există evaluări
- 2011 Online CatalogDocument198 pagini2011 Online CatalogdmkrouseÎncă nu există evaluări
- Supertech TT PricelistDocument50 paginiSupertech TT PricelistRonaldo951630% (2)
- Bissel PROheat 2XDocument24 paginiBissel PROheat 2XBob HammettÎncă nu există evaluări
- 2007 Nissan Xterra 23Document80 pagini2007 Nissan Xterra 23Roma Roma100% (1)
- Operator and Organizational Maintenance PDFDocument179 paginiOperator and Organizational Maintenance PDFNabeelKadhimAbboodÎncă nu există evaluări
- 8400 Position Sequencer Technology Application v1-0 enDocument58 pagini8400 Position Sequencer Technology Application v1-0 enMarcio CamposÎncă nu există evaluări
- Fire Alarm System Inspection and Testing FormDocument4 paginiFire Alarm System Inspection and Testing FormBrahim SemariÎncă nu există evaluări
- Form 7433 Rev PC-3000Document1 paginăForm 7433 Rev PC-3000mancangkulÎncă nu există evaluări
- LV Panel - Enginering GuideDocument19 paginiLV Panel - Enginering GuideMohammed HashimÎncă nu există evaluări
- Agileire 8872 ManualDocument167 paginiAgileire 8872 ManualEdgar I RamirezÎncă nu există evaluări
- 3042-CMP-001&002 CMC 2005 Technical Manual PDFDocument182 pagini3042-CMP-001&002 CMC 2005 Technical Manual PDFJuan ValdezÎncă nu există evaluări
- GB RevbDocument228 paginiGB RevbChad TerrettÎncă nu există evaluări
- Hotel Hotel Hotel Hotel Management Management Management Management Information Information Information Information Systems Systems Systems SystemsDocument77 paginiHotel Hotel Hotel Hotel Management Management Management Management Information Information Information Information Systems Systems Systems SystemsLoi BuchornoÎncă nu există evaluări
- TMW 124 APC Diagnostic ChecklistDocument1 paginăTMW 124 APC Diagnostic ChecklistweldsaidiÎncă nu există evaluări
- Preventive Maintenance Checklist: Biomedical. EngDocument150 paginiPreventive Maintenance Checklist: Biomedical. EngJuli AgustonoÎncă nu există evaluări
- Engine Repair ILT Participant GuideDocument15 paginiEngine Repair ILT Participant Guidejordan navarroÎncă nu există evaluări
- Add 51 BFDocument193 paginiAdd 51 BFMagedÎncă nu există evaluări
- MEWP Exam For Authorization Date: - Rating: - Name of Inspector & SignatureDocument3 paginiMEWP Exam For Authorization Date: - Rating: - Name of Inspector & SignatureOwais MalikÎncă nu există evaluări
- 1207 C Manual 101Document59 pagini1207 C Manual 101Cristian TeodorescuÎncă nu există evaluări
- Agenda For Technical Conference - Wednesday, March 24 Notes: StabilityDocument2 paginiAgenda For Technical Conference - Wednesday, March 24 Notes: Stabilityapi-26191239Încă nu există evaluări
- SECTION 04 After Sales Service PolicyDocument14 paginiSECTION 04 After Sales Service PolicyRFamDamilyÎncă nu există evaluări
- 580 Hc107r O&mmanengDocument193 pagini580 Hc107r O&mmanengMario Garcia67% (6)
- Product Guide - April PDFDocument75 paginiProduct Guide - April PDFPunith KumarÎncă nu există evaluări
- B2.1 B2.1M 2014 AMD1 Stud Welding WPS PQR or WQR FormDocument1 paginăB2.1 B2.1M 2014 AMD1 Stud Welding WPS PQR or WQR FormtuanÎncă nu există evaluări
- AB PLC ManualDocument107 paginiAB PLC ManualMarius GligorÎncă nu există evaluări
- Altivar 61: Communication Parameters User's ManualDocument132 paginiAltivar 61: Communication Parameters User's ManualsimbamikeÎncă nu există evaluări
- Meridium APM SAP Interfaces V3.6.0.0.0Document440 paginiMeridium APM SAP Interfaces V3.6.0.0.0saikumar bhoppleÎncă nu există evaluări
- IRobot Scooba Service ManualDocument61 paginiIRobot Scooba Service Manualbiggertv0% (1)
- 416 Theatre Practice PolicyDocument131 pagini416 Theatre Practice Policybalab2311Încă nu există evaluări
- WellheadCatalogue 2009Document49 paginiWellheadCatalogue 2009RrelicÎncă nu există evaluări
- Panel ComponentsDocument118 paginiPanel ComponentsUsman KhalidÎncă nu există evaluări
- Form Blank Kelengkapan Data SampleDocument1 paginăForm Blank Kelengkapan Data SampleVin DieselÎncă nu există evaluări
- Solderer Performance Qualification (SPQ) - Sample Form: Qualification, AWS B2.3/B2.3MDocument1 paginăSolderer Performance Qualification (SPQ) - Sample Form: Qualification, AWS B2.3/B2.3MBernardo LeorÎncă nu există evaluări
- SQL Server In-Memory OLTP PDFDocument208 paginiSQL Server In-Memory OLTP PDFAjay DwivediÎncă nu există evaluări
- Lighting Protection System v.02Document2 paginiLighting Protection System v.02Nicholas TanÎncă nu există evaluări
- Add 51 SaDocument132 paginiAdd 51 SaMagedÎncă nu există evaluări
- Check List Compresores Rotativos PDFDocument1 paginăCheck List Compresores Rotativos PDFAnonymous ZtXb2ROÎncă nu există evaluări
- ATV21 Programlama Kılavuzu enDocument145 paginiATV21 Programlama Kılavuzu enUsman KhanÎncă nu există evaluări
- Datacard I50i Card Personalization System Maintenance ManualDocument326 paginiDatacard I50i Card Personalization System Maintenance Manualivanzarate100% (4)
- Reliability Centered Maintenance (RCM)Document204 paginiReliability Centered Maintenance (RCM)Rajeev100% (1)
- Elevator Inspection Records Quality Control (QC) Dept.: Pt. Ife Jaya IndonesiaDocument8 paginiElevator Inspection Records Quality Control (QC) Dept.: Pt. Ife Jaya IndonesiaNaseh Ya NasehÎncă nu există evaluări
- Safety & Installation Instructions: Model 8920W Wi-Fi IAQ ThermostatDocument11 paginiSafety & Installation Instructions: Model 8920W Wi-Fi IAQ ThermostatsturrockÎncă nu există evaluări
- SSFC Rectifier Power StagesDocument15 paginiSSFC Rectifier Power StagessturrockÎncă nu există evaluări
- Safety & Installation Instructions: Model 8920W Wi-Fi IAQ ThermostatDocument11 paginiSafety & Installation Instructions: Model 8920W Wi-Fi IAQ ThermostatsturrockÎncă nu există evaluări
- Fender 1956 Musicmaster Guitar AdDocument1 paginăFender 1956 Musicmaster Guitar AdsturrockÎncă nu există evaluări
- Ilsintech Multipack R InfoDocument2 paginiIlsintech Multipack R InfosturrockÎncă nu există evaluări
- Batteries and FlywheelsDocument21 paginiBatteries and FlywheelssturrockÎncă nu există evaluări
- Irrigating Citrus: Water Stress Signs & Proper ApplicationDocument5 paginiIrrigating Citrus: Water Stress Signs & Proper ApplicationsturrockÎncă nu există evaluări
- Ethics LectureDocument18 paginiEthics LecturesturrockÎncă nu există evaluări
- GNX4 ManualDocument132 paginiGNX4 ManualsturrockÎncă nu există evaluări
- Batteries and FlywheelsDocument21 paginiBatteries and FlywheelssturrockÎncă nu există evaluări
- GNX4 ManualDocument132 paginiGNX4 ManualsturrockÎncă nu există evaluări
- TSTC Waco Catalog 2009-2010 012610Document238 paginiTSTC Waco Catalog 2009-2010 012610sturrockÎncă nu există evaluări
- DegreeSheet - Main 2011 01 29Document3 paginiDegreeSheet - Main 2011 01 29sturrockÎncă nu există evaluări
- Handout Using MLA Format-2009 9 28Document8 paginiHandout Using MLA Format-2009 9 28sturrockÎncă nu există evaluări
- Owner's Manual: Centurion 15 Sporter Rifle Cal. .223Document12 paginiOwner's Manual: Centurion 15 Sporter Rifle Cal. .223sturrockÎncă nu există evaluări
- GNX4 ManualDocument132 paginiGNX4 ManualsturrockÎncă nu există evaluări
- Unit 1 TQM NotesDocument26 paginiUnit 1 TQM NotesHarishÎncă nu există evaluări
- Marshal HMA Mixture Design ExampleDocument2 paginiMarshal HMA Mixture Design ExampleTewodros TadesseÎncă nu există evaluări
- QueriesDocument50 paginiQueriesBajji RajinishÎncă nu există evaluări
- Portfolio Artifact Entry Form - Ostp Standard 3Document1 paginăPortfolio Artifact Entry Form - Ostp Standard 3api-253007574Încă nu există evaluări
- TWP10Document100 paginiTWP10ed9481Încă nu există evaluări
- Postgraduate Notes in OrthodonticsDocument257 paginiPostgraduate Notes in OrthodonticsSabrina Nitulescu100% (4)
- NAT Order of Operations 82Document39 paginiNAT Order of Operations 82Kike PadillaÎncă nu există evaluări
- National Standard Examination in Astronomy 2018-19 (NSEA) : Question Paper Code: A423Document1 paginăNational Standard Examination in Astronomy 2018-19 (NSEA) : Question Paper Code: A423VASU JAINÎncă nu există evaluări
- EIN CP 575 - 2Document2 paginiEIN CP 575 - 2minhdang03062017Încă nu există evaluări
- LM1011 Global ReverseLogDocument4 paginiLM1011 Global ReverseLogJustinus HerdianÎncă nu există evaluări
- Account Statement From 30 Jul 2018 To 30 Jan 2019Document8 paginiAccount Statement From 30 Jul 2018 To 30 Jan 2019Bojpuri OfficialÎncă nu există evaluări
- April 26, 2019 Strathmore TimesDocument16 paginiApril 26, 2019 Strathmore TimesStrathmore Times100% (1)
- Social Media Exposure and Its Perceived Impact On Students' Home-Based Tasks ProductivityDocument9 paginiSocial Media Exposure and Its Perceived Impact On Students' Home-Based Tasks ProductivityJewel PascuaÎncă nu există evaluări
- Personalised MedicineDocument25 paginiPersonalised MedicineRevanti MukherjeeÎncă nu există evaluări
- Cushman Wakefield - PDS India Capability Profile.Document37 paginiCushman Wakefield - PDS India Capability Profile.nafis haiderÎncă nu există evaluări
- Web Api PDFDocument164 paginiWeb Api PDFnazishÎncă nu există evaluări
- Tension field beams: Aircraft wing spar analysisDocument19 paginiTension field beams: Aircraft wing spar analysisPrajeesh RajÎncă nu există evaluări
- Marketing Plan for Monuro Clothing Store Expansion into CroatiaDocument35 paginiMarketing Plan for Monuro Clothing Store Expansion into CroatiaMuamer ĆimićÎncă nu există evaluări
- PLC Networking with Profibus and TCP/IP for Industrial ControlDocument12 paginiPLC Networking with Profibus and TCP/IP for Industrial Controltolasa lamessaÎncă nu există evaluări
- STAT100 Fall19 Test 2 ANSWERS Practice Problems PDFDocument23 paginiSTAT100 Fall19 Test 2 ANSWERS Practice Problems PDFabutiÎncă nu există evaluări
- 5511Document29 pagini5511Ckaal74Încă nu există evaluări
- Iso 9001 CRMDocument6 paginiIso 9001 CRMleovenceÎncă nu există evaluări
- DECA IMP GuidelinesDocument6 paginiDECA IMP GuidelinesVuNguyen313Încă nu există evaluări
- TOGAF 9 Foundation Part 1 Exam Preparation GuideDocument114 paginiTOGAF 9 Foundation Part 1 Exam Preparation GuideRodrigo Maia100% (3)
- Sentinel 2 Products Specification DocumentDocument510 paginiSentinel 2 Products Specification DocumentSherly BhengeÎncă nu există evaluări
- If V2 would/wouldn't V1Document2 paginiIf V2 would/wouldn't V1Honey ThinÎncă nu există evaluări
- Energy AnalysisDocument30 paginiEnergy Analysisca275000Încă nu există evaluări
- Circular Flow of Process 4 Stages Powerpoint Slides TemplatesDocument9 paginiCircular Flow of Process 4 Stages Powerpoint Slides TemplatesAryan JainÎncă nu există evaluări
- Android software download guideDocument60 paginiAndroid software download guideRizky PradaniÎncă nu există evaluări
- Polytechnic University Management Services ExamDocument16 paginiPolytechnic University Management Services ExamBeverlene BatiÎncă nu există evaluări