International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 2 Issue: 4
ISSN: 2321-8169
954 957
_____________________________________________________________________________________
Edge Detection Technique by Fuzzy Logic CLA and Canny Edge Detector using Fuzzy
Image Processing
B. Divya
Dr. T. K. Shanthi
T. K. Sethuramalingam
II - M.E. (Applied Electronics)
Department of ECE
Thanthai Periyar Government
Institute of Technology
Vellore, Tamilnadu, India
Head,Department of ECE
Thanthai Periyar Government
Institute of Technology
Vellore, Tamilnadu, India
Associate Professor,
Department of ECE - PG
Karpagam College of Engg,
Coimbatore, Tamilnadu, India
tkshanthi@gmail.com
tksethuramalingam@gmail.com
divyabalaji70@gmail.com
Ebin Ephrem Elavathingal
I - M.E (Communication Systems),
Karpagam College of Engg,
Coimbatore, Tamilnadu, India
mail2ebine@gmail.com
Abstract-Edge detection in an image is an major issue in image processing. Many hidden objects can be identified using edge detection
which gives major clue in identifying actual truth behind the images. In this paper, double thresholding method of edge detection along with
canny edge detector is used to identify the small objects in an images. Here threshold plays a major role which extracts the clear image from
unclear picture.
Keywords-Fuzzy logic, Cellular learning automata, Canny edge detector, Thresholding.
__________________________________________________*****_________________________________________________
1 Introduction-Modelling various aspects of human brain
is the present artificial intelligence. To deal properly with
uncertainities and imprecision which arise from human
thinking, mentation cognition and perception, some tools
are required. Contrast is one of the most important issues
in image processing, pattern recognition and computer
vision. Fuzzy logic has been found many applications in
image processing. Fuzzy set theory is the useful tool for
handling
uncertainities
related
with
vagueness/imprecision. Image enhancement is employed
to transform an image on basis of psychophysical
characteristics on human visual system. To visualize an
image to human eyes, the modification of intensitys
distribution inside small regions of the image should be
conducted. The basic idea of direct contrast enhancement
method is to obtain a criterion of contrast measurement
and enhance the image by improving the contrast and
increasing the threshold value. Contrast can be measured
globally and locally. It is more appropriate to a local
contrast when an image contains textural information. The
brightness variation is estimated by local image statistics.
so when the brightness change in a region is severe, the
degree of enhancement is high and enhancement is
relatively low. The image storage in bitmap format is not
so used in day-to-day applications; even medical images
are stored in JPEG format. The fuzzy enhancement is
implemented in the fuzzy characteristic plane, with the
help of contrast intensification operator. Whenever image
is converted from one form to another such as digitizing,
scanning, transmitting, storing etc. some of the
degradation occurs at the output. Hence output image has
to undergo image enhancement which consists of
collection of techniques to seek improvement in an image.
The edge of the object is reflected by the incontinuity of
the gray value. The point of edge also exists between the
two neighbors , that is to say, one exists in the inner of a
bright region , and the other outside. The other features of
the image are all deduced by the foundational feature of
the edge and the region. The edge has two features of
direction and amplitude: the value of the pixel changes
very gently along the edge; and the value of the pixel
changes very strongly along the plumb direction of the
edge. This kind of acuteness may be hop or sloping. The
traditional edge detection is based on the original image.
Every pixel of the image is detected by the gray value
change of neighbors, and make use of the change of the
one-order or two-order directional differential coefficient
to detect the edge . This kind of method is called the edge
detection partial operator. The kinds of the edge can be
divided into two parts: one is called the hop change edge,
the gray value of the pixels beside the edge is obviously
different; the other is called the housetop edge, it locates
in the turning point of the gray value from the increasing
to the declining change. Edge detection is one of the most
important algorithms in image processing. It plays a
fundamental role in higher level processing. Edges
954
IJRITCC | April 2014, Available @ http://www.ijritcc.org
______________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 2 Issue: 4
ISSN: 2321-8169
954 957
_____________________________________________________________________________________
potentially have important information about image
content. In human visual system, a preprocessing stage,
image edges are detected. Regarding to importance of
edges in image processing algorithms, such as object
detection, capabilities and accuracy of edge detection
algorithms are important factors. Image processing with
the used of mathematic operations, the edge detection is
implemented with using gradient or by using an
appropriate filter for extracting image properties in edges,
liners, curves and angles. The most important problem in
image processing is the edge detection of useless
information filter that cause the decrease of data value.
The most important property of the detection of the
objects is the use of their edges information. In order to
improve text extraction accuracy, some text segmentation
approaches also use character properties such as size, stroke
width, directions, and run-length histogram. Other
binarization approaches for document coding have used
rate-distortion minimization as criteria for document
binarization. Many recent
approaches to text
segmentation have been based upon statistical models.
One of the best commercial text segmentation algorithms,
which are incorporated in the DjVu document encoder,
uses a hidden Markov model (HMM).
2. Feasibility study-It is concerned to select the best system
that meets performance requirements. These entities are an
identification description, an evaluation of candidate
systems and the selection of the best system for the job.
Economic feasibility
Technical feasibility
Behavioural feasibility
Economic feasibility
Economic analysis is the most frequently used method
for evaluating the effectiveness of the candidate system.
More commonly known as cost/benefit analysis, the
procedure is to determine the benefits and savings that
benefits outweigh costs, and then the decision is made
to design and implement the system. Otherwise, further
justification or alterations in the proposed system will
have to be made if it is to have an enhancement to
approve.
Technical feasibility Technical analysis centre on the
existing computer system (Hardware, Software etc) and to
what extend it can support the proposed addition. This
involves financial considerations to accommodate technical
enhancement. If the budget is a serious constraint, then the
project is judged not feasible.
Behavioural feasibility An estimate should we made of
how strong a reaction the user staff is likely to have toward
the development of a computerized system. It is common
Knowledge the computer installations have something to do
understandable that the introduction of a candidate system
requires special effort to educate, sell and train the Staff on
new ways of considering business.
Implementation- Implementation is the stage of the project
when the theoretical design is turned out into a working
system. Thus it can be considered to be the most critical
stage in achieving a successful new system and in giving the
user, confidence that the new system will work and be
effective. The implementation stage involves careful
planning, investigation of the existing system and its
constraints on implementation, designing of methods to
achieve changeover and evaluation of changeover methods.
Get the Text Input: In this module were going to get the
text input from the matlab workspace.
Separate the Foreground and Background: In this
module were going to separate the foreground and
background of the text input. Which we have given earlier
as the input. Were going to separate the foreground and
background using the algorithm.
Detect the Binary masking: The term binary masking is
defined here in this module as, here the input text image is
displayed as normal image as the black all the text input
image.
Decode the Text Input Region: In this module were going
to decode the text input (i. e. ) we should decode the text
input region which we have already given as input.
Get the Original input Image: In this module were going
to get the original input image. In order to get the original
input image we should browse the image from the particular
mat lab folder.
Separate the image using algorithm: To improve
accuracy in the detection of text with varying size, a multi
scale framework into the COS/CCC segmentation algorithm.
The multi scale framework allows detecting both large and
small components by combining results from different
resolutions. Since the COS algorithm uses a single block
size (i. e. , single scale).
Decode Multi scale image: To measure the segmentation
accuracy of each algorithm, that used a set of scanned
documents along with corresponding ground truth
segmentations. Documents were chosen from different
document types, including flyers, newspapers, and
magazines.
Decode MRC image: In this s ection, we will evaluate our
selected prior model. We used the initial segmentation result
generated by COS with a single block size 32.
3. Architecture-. The edge pixels are the pixels whose gray level
have high difference with the gray levels of their neighborhood pixels.
However, the definition of high is quite fuzzy and applicationdependant. The edge pixels are the pixels whose gray level have high
955
IJRITCC | April 2014, Available @ http://www.ijritcc.org
______________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 2 Issue: 4
ISSN: 2321-8169
954 957
_____________________________________________________________________________________
difference with the gray levels of their neighborhood pixels. However,
the definition of high is quite fuzzy and application- dependant.
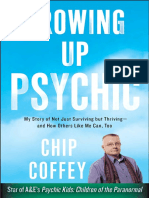
Fig 1 block diagram
Image fuzzification The image that read is gray scale image
and data might range from 0 to 255. The data 0 belongs to
black pixel of the image and data 255 belongs to while pixel
of the image. In order to apply the fuzzy algorithm, data
should be in the range of 0 to 1 only. The image data are
converted to this range that is known as membership plane,
after the image data are transformed from gray-level plane
to the membership plane (fuzzification); appropriate fuzzy
techniques modify the membership values. This can be a
fuzzy clustering, a fuzzy rule-based approach and a fuzzy
integration approach.
Defuzzification From the side of the fuzzy construction,
the input grays is ranged from 0-255 gray intensity, and
according to the desired rules the gray level is converted to
the values of the membership functions . The Mamdani
method was chosen as the defuzzification procedure , the
output of the FIS according to the defuzzification is
presented again to the values from 0-255 and then the black,
white and edge are detected.
Learning automata It is machines which have a limited
number of probabilities and for each of the learning
automata a probability vector is allocated. This vector
determines that each operation be implemented with what
probability. Each selected operation is estimated by
probability environment and the result is given to automata
as a positive and negative signal.
Cellular automata- Cellular automata was posed by
Neuman in the late 1940s and after him it was proposed by
mathematician Ulam (Ulam, 1972; Zhang, Zhong, & Zhao,
2007) as a model of producing calculations and simulation
of systems in which multiple simple components cooperate
for producing more complex patterns. Cellular automata are
discrete dynamic systems that the operation is as local
relations. In this model space is defined as a network in
which each part is called a cell. And it is composed of a
limited number of cells. For example two simple
components and One-dimensional cellular automata are
considered as a liner cell and each of the cells takes either
zero or one. The system status in cellular automata is
specified with using the total cell status the relationship
between adjacencies and environmental rules.
4. Edge detector algorithm The edge detector proposed in
the paper is based on cellular automata. The algorithm was
implemented in MATLAB.
Step 1: Input color or grayscale image. If the input image is
color image then use either of the following method to
convert it to grayscale.
The Lightness method averages the most prominent
and least prominent colors: (max(R, G, B) + min(R,
G, B)) / 2. The lightness method tends to reduce
contrast.
The Average method simply averages the values:
(R + G + B) / 3.
The Luminosity method is a more sophisticated
version of the average method. It also averages the
values, but it forms a weighted average to account
for human perception. Were more sensitive to
green than other colors, so green is weighted most
heavily. The formula for luminosity is 0. 21 R + 0.
71 G + 0. 07 B. The luminosity method works best
overall.
Step 2: Binarize the input image using Otsus method, a
global image threshold T1, get a binary image1.
Step 3: Binarize the input image using threshold T2, get a
binary image2.
Step 4: Count the number of non-zero neighbors of each
pixel and generate a Neighbor matrix for both image1 and
image2.
Step 5: For each cell, determine what it should become in
the next time step, based on the states of its neighbors, using
the cellular automata rule set.
Step 6: If the number of neighbors of a pixel P is 5 and its
initial state is dead, then mark it dead. Then, find a pixel Q
(initially alive) which is one of the four horizontal and
vertical neighbors of P, such that the number of neighbors of
Q is greater than 5, Mark Q as alive. This rule will solve the
problem of concavity.
Step 7: If the number of neighbors of a pixel P is less than
or equal to 3, and its initial state is alive, then find a pixel Q
which is one of the four horizontal and vertical neighbors of
P, having number of neighbors equal to 1. If any such pixel
exists then mark this pixel P as alive and not dead unlike in
the existing algorithm. This rule helps from missing out
some edge pixels.
956
IJRITCC | April 2014, Available @ http://www.ijritcc.org
______________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 2 Issue: 4
ISSN: 2321-8169
954 957
_____________________________________________________________________________________
Step 8: Obtain the processed image with thin edges.
Result and Conclusion Because of the uncertainties that
exist in many aspects of image processing, and as image are
always dynamic, fuzzy processing is desirable. These
uncertainties include additive and non-additive noise in low
level image processing, imprecision in the assumptions
underlying the algorithms, and ambiguities in interpretation
during high level image processing. For the common
process of edge detection usually models edges as intensity
ridges. Finally by increasing the threshold value greater than
50 and contrast can be improved.
[4]
[5]
[6]
[7]
[8]
5. References
[1]
K. Kaur, V. Mutenja, I. S. Gill. 2010. Fuzzy Logic
Based Image Edge Detection algorithm in MATLAB.
International Journal of Computer Applications(09758887), Vol. 1, pp. 55-58.
[2]
C. Suliman, C. Boldi?or, R. B?z?van, F.
Moldoveanu 2011. A Fuzzy Logic Based Method
For Edge Detection. Bulletin of the Transilvania
University of Bra?ov Series I: Engineering
Sciences, Vol. 4 (53) No. 1.
[3]
Canny J. 1986. A Computational Approach to Edge
Detection", IEEE Trans. Pattern Analysis and
Machine Intelligence, 8:679-714.
[9]
E. Nadernejad, S. Sharifzadeh and H. Hassanpour.
2008. Edge Detection Techniques: Evaluations and
Comparisons. Applied Mathematical Sciences, Vol.
2, No. 31, 1507 1520.
Wafa Barkhoda, Fardin Akhlaqian Tab, OmKolsoom Shahryari. 2009. Fuzzy Edge Detection
Based on Pixel's Gradient and Standard Deviation
Values. Iran.
Rung Wang, Li-Quinn Ago, Shoo Yang, Yan-Chun
Liu. 2005. An Edge Detection Method by
Combining Fuzzy Logic and Neural Network. In
Proceedings of the Fourth International Conference
on Machine Learning and Cybernetics, Guangzhou,
18-21, pp. 4539-4543.
Yinghua Li, Bingqi Liu, and Bin Zhou. 2005. The
Application of Image Edge Detection by using
Fuzzy Technique. In Proceedings of SPIE Vol.
5637 (SPIE) Bellingham, WA.
Dong-Su Kim, Wang-Heon Lee , In-So Kweon.
2004. Automatic edge detection using 3x3 ideal
binary pixel patterns and fuzzy-based edge
thresholding. Pattern Recognition Letters.
Saman S. et al. 2009. A Hybrid Edge Detection
Method Based on Fuzzy Set theory and Cellular
Learning Automata. In Proceedings of the
International Conference on Computational
Science and Its Applications, ICCSA. IEEE
Computer Society, pp. 208-214.
957
IJRITCC | April 2014, Available @ http://www.ijritcc.org
______________________________________________________________________________
S-ar putea să vă placă și
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Growing Up Psychic by Chip Coffey - ExcerptDocument48 paginiGrowing Up Psychic by Chip Coffey - ExcerptCrown Publishing Group100% (1)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- McKinsey & Co - Nonprofit Board Self-Assessment Tool Short FormDocument6 paginiMcKinsey & Co - Nonprofit Board Self-Assessment Tool Short Formmoctapka088100% (1)
- Final Exam: Functional Performance Testing: Technical vs. Process CommissioningDocument9 paginiFinal Exam: Functional Performance Testing: Technical vs. Process CommissioningBen MusimaneÎncă nu există evaluări
- Sample Statement of Purpose.42120706Document8 paginiSample Statement of Purpose.42120706Ata Ullah Mukhlis0% (2)
- Image Restoration Techniques Using Fusion To Remove Motion BlurDocument5 paginiImage Restoration Techniques Using Fusion To Remove Motion Blurrahul sharmaÎncă nu există evaluări
- Key Note Units 3-4Document4 paginiKey Note Units 3-4Javier BahenaÎncă nu există evaluări
- A Review of Wearable Antenna For Body Area Network ApplicationDocument4 paginiA Review of Wearable Antenna For Body Area Network ApplicationEditor IJRITCCÎncă nu există evaluări
- Network Approach Based Hindi Numeral RecognitionDocument4 paginiNetwork Approach Based Hindi Numeral RecognitionEditor IJRITCCÎncă nu există evaluări
- Regression Based Comparative Study For Continuous BP Measurement Using Pulse Transit TimeDocument7 paginiRegression Based Comparative Study For Continuous BP Measurement Using Pulse Transit TimeEditor IJRITCCÎncă nu există evaluări
- Channel Estimation Techniques Over MIMO-OFDM SystemDocument4 paginiChannel Estimation Techniques Over MIMO-OFDM SystemEditor IJRITCCÎncă nu există evaluări
- Efficient Techniques For Image CompressionDocument4 paginiEfficient Techniques For Image CompressionEditor IJRITCCÎncă nu există evaluări
- A Review of 2D &3D Image Steganography TechniquesDocument5 paginiA Review of 2D &3D Image Steganography TechniquesEditor IJRITCCÎncă nu există evaluări
- Performance Analysis of Image Restoration Techniques at Different NoisesDocument4 paginiPerformance Analysis of Image Restoration Techniques at Different NoisesEditor IJRITCCÎncă nu există evaluări
- A Review of 2D &3D Image Steganography TechniquesDocument5 paginiA Review of 2D &3D Image Steganography TechniquesEditor IJRITCCÎncă nu există evaluări
- IJRITCC Call For Papers (October 2016 Issue) Citation in Google Scholar Impact Factor 5.837 DOI (CrossRef USA) For Each Paper, IC Value 5.075Document3 paginiIJRITCC Call For Papers (October 2016 Issue) Citation in Google Scholar Impact Factor 5.837 DOI (CrossRef USA) For Each Paper, IC Value 5.075Editor IJRITCCÎncă nu există evaluări
- A Review of Wearable Antenna For Body Area Network ApplicationDocument4 paginiA Review of Wearable Antenna For Body Area Network ApplicationEditor IJRITCCÎncă nu există evaluări
- Importance of Similarity Measures in Effective Web Information RetrievalDocument5 paginiImportance of Similarity Measures in Effective Web Information RetrievalEditor IJRITCCÎncă nu există evaluări
- A Study of Focused Web Crawling TechniquesDocument4 paginiA Study of Focused Web Crawling TechniquesEditor IJRITCCÎncă nu există evaluări
- Comparative Analysis of Hybrid Algorithms in Information HidingDocument5 paginiComparative Analysis of Hybrid Algorithms in Information HidingEditor IJRITCCÎncă nu există evaluări
- Channel Estimation Techniques Over MIMO-OFDM SystemDocument4 paginiChannel Estimation Techniques Over MIMO-OFDM SystemEditor IJRITCCÎncă nu există evaluări
- Diagnosis and Prognosis of Breast Cancer Using Multi Classification AlgorithmDocument5 paginiDiagnosis and Prognosis of Breast Cancer Using Multi Classification AlgorithmEditor IJRITCCÎncă nu există evaluări
- Modeling Heterogeneous Vehicle Routing Problem With Strict Time ScheduleDocument4 paginiModeling Heterogeneous Vehicle Routing Problem With Strict Time ScheduleEditor IJRITCCÎncă nu există evaluări
- Itimer: Count On Your TimeDocument4 paginiItimer: Count On Your Timerahul sharmaÎncă nu există evaluări
- Fuzzy Logic A Soft Computing Approach For E-Learning: A Qualitative ReviewDocument4 paginiFuzzy Logic A Soft Computing Approach For E-Learning: A Qualitative ReviewEditor IJRITCCÎncă nu există evaluări
- Vehicular Ad-Hoc Network, Its Security and Issues: A ReviewDocument4 paginiVehicular Ad-Hoc Network, Its Security and Issues: A Reviewrahul sharmaÎncă nu există evaluări
- Hybrid Algorithm For Enhanced Watermark Security With Robust DetectionDocument5 paginiHybrid Algorithm For Enhanced Watermark Security With Robust Detectionrahul sharmaÎncă nu există evaluări
- Predictive Analysis For Diabetes Using Tableau: Dhanamma Jagli Siddhanth KotianDocument3 paginiPredictive Analysis For Diabetes Using Tableau: Dhanamma Jagli Siddhanth Kotianrahul sharmaÎncă nu există evaluări
- Prediction of Crop Yield Using LS-SVMDocument3 paginiPrediction of Crop Yield Using LS-SVMEditor IJRITCCÎncă nu există evaluări
- 45 1530697786 - 04-07-2018 PDFDocument5 pagini45 1530697786 - 04-07-2018 PDFrahul sharmaÎncă nu există evaluări
- 44 1530697679 - 04-07-2018 PDFDocument3 pagini44 1530697679 - 04-07-2018 PDFrahul sharmaÎncă nu există evaluări
- 41 1530347319 - 30-06-2018 PDFDocument9 pagini41 1530347319 - 30-06-2018 PDFrahul sharmaÎncă nu există evaluări
- Safeguarding Data Privacy by Placing Multi-Level Access RestrictionsDocument3 paginiSafeguarding Data Privacy by Placing Multi-Level Access Restrictionsrahul sharmaÎncă nu există evaluări
- A Clustering and Associativity Analysis Based Probabilistic Method For Web Page PredictionDocument5 paginiA Clustering and Associativity Analysis Based Probabilistic Method For Web Page Predictionrahul sharmaÎncă nu există evaluări
- Space Complexity Analysis of Rsa and Ecc Based Security Algorithms in Cloud DataDocument12 paginiSpace Complexity Analysis of Rsa and Ecc Based Security Algorithms in Cloud Datarahul sharmaÎncă nu există evaluări
- A Content Based Region Separation and Analysis Approach For Sar Image ClassificationDocument7 paginiA Content Based Region Separation and Analysis Approach For Sar Image Classificationrahul sharmaÎncă nu există evaluări
- Rolfsen Knot Table Guide Crossings 1-10Document4 paginiRolfsen Knot Table Guide Crossings 1-10Pangloss LeibnizÎncă nu există evaluări
- Trendline Mastery: Course Outline: 3. Interview of Peter Bain by Frank PaulDocument5 paginiTrendline Mastery: Course Outline: 3. Interview of Peter Bain by Frank PaulnacareÎncă nu există evaluări
- NAVMC 3500.35A (Food Services)Document88 paginiNAVMC 3500.35A (Food Services)Alexander HawkÎncă nu există evaluări
- Backup 2Document59 paginiBackup 2Fabiola Tineo GamarraÎncă nu există evaluări
- Manzano's and Kendall Taxonomy of Cognitive ProcessesDocument5 paginiManzano's and Kendall Taxonomy of Cognitive ProcessesSheena BarulanÎncă nu există evaluări
- CH13 QuestionsDocument4 paginiCH13 QuestionsAngel Itachi MinjarezÎncă nu există evaluări
- Reich Web ADocument34 paginiReich Web Ak1nj3Încă nu există evaluări
- Investigation of Water Resources Projects - Preparation of DPRDocument148 paginiInvestigation of Water Resources Projects - Preparation of DPRN.J. PatelÎncă nu există evaluări
- Configuring Nagios On Client For OSSIMDocument10 paginiConfiguring Nagios On Client For OSSIMMaixender NganareÎncă nu există evaluări
- MGMT 410 Book ReportDocument1 paginăMGMT 410 Book ReportLester F BoernerÎncă nu există evaluări
- Science 10 3.1 The CrustDocument14 paginiScience 10 3.1 The CrustマシロIzykÎncă nu există evaluări
- Charny - Mathematical Models of Bioheat TransferDocument137 paginiCharny - Mathematical Models of Bioheat TransferMadalena PanÎncă nu există evaluări
- The God Complex How It Makes The Most Effective LeadersDocument4 paginiThe God Complex How It Makes The Most Effective Leadersapi-409867539Încă nu există evaluări
- S32 Design Studio 3.1: NXP SemiconductorsDocument9 paginiS32 Design Studio 3.1: NXP SemiconductorsThành Chu BáÎncă nu există evaluări
- JEE Test Series ScheduleDocument4 paginiJEE Test Series ScheduleB.K.Sivaraj rajÎncă nu există evaluări
- Royal DSMDocument16 paginiRoyal DSMSree100% (2)
- Literary Text Analysis WorksheetDocument1 paginăLiterary Text Analysis Worksheetapi-403444340Încă nu există evaluări
- C code snippets with answersDocument14 paginiC code snippets with answersqwerty6327Încă nu există evaluări
- LuberigthDocument24 paginiLuberigthEnrique BarriosÎncă nu există evaluări
- CIPP ModelDocument36 paginiCIPP ModelIghfir Rijal TaufiqyÎncă nu există evaluări
- Excellence Range DatasheetDocument2 paginiExcellence Range DatasheetMohamedYaser100% (1)
- Cellulose StructureDocument9 paginiCellulose Structuremanoj_rkl_07Încă nu există evaluări
- Menggambar Dengan Mode GrafikDocument30 paginiMenggambar Dengan Mode GrafikkurniawanÎncă nu există evaluări
- ECE 340 Lecture 26 Avalanche Zener BreakdownDocument20 paginiECE 340 Lecture 26 Avalanche Zener BreakdownDao ZhangÎncă nu există evaluări
- ArrayList QuestionsDocument3 paginiArrayList QuestionsHUCHU PUCHUÎncă nu există evaluări