S-ar putea să vă placă și
- Daa Mod - 3-1Document14 paginiDaa Mod - 3-1Disha GudigarÎncă nu există evaluări
- Random MatricesDocument27 paginiRandom MatricesolenobleÎncă nu există evaluări
- CS168: The Modern Algorithmic Toolbox Lecture #9: The Singular Value Decomposition (SVD) and Low-Rank Matrix ApproximationsDocument10 paginiCS168: The Modern Algorithmic Toolbox Lecture #9: The Singular Value Decomposition (SVD) and Low-Rank Matrix Approximationsenjamamul hoqÎncă nu există evaluări
- Wave EqnDocument15 paginiWave EqnALÎncă nu există evaluări
- XX Open Cup Grand Prix of Warsaw Editorial: Mateusz Radecki (Radewoosh) Marek Sokolowski (Mnbvmar) September 15, 2019Document9 paginiXX Open Cup Grand Prix of Warsaw Editorial: Mateusz Radecki (Radewoosh) Marek Sokolowski (Mnbvmar) September 15, 2019Roberto FrancoÎncă nu există evaluări
- As Needed For Those Other Classes (So If You Get Lucky and Find A Solution in One ofDocument12 paginiAs Needed For Those Other Classes (So If You Get Lucky and Find A Solution in One ofYogendra MishraÎncă nu există evaluări
- The' Wave Equation: 1.1 One Dimension: Waves On A Stretched StringDocument12 paginiThe' Wave Equation: 1.1 One Dimension: Waves On A Stretched StringDavid ThomsonÎncă nu există evaluări
- Advanced Algorithms Course. Lecture Notes. Part 11: Chernoff BoundsDocument4 paginiAdvanced Algorithms Course. Lecture Notes. Part 11: Chernoff BoundsKasapaÎncă nu există evaluări
- CS124 Spring 2011Document6 paginiCS124 Spring 2011Divya MathurÎncă nu există evaluări
- BVPsDocument18 paginiBVPsGEORGE FRIDERIC HANDELÎncă nu există evaluări
- 0.1 Review (Recurrences)Document8 pagini0.1 Review (Recurrences)shashank dwivediÎncă nu există evaluări
- 18.S096: Homework Problem Set 1 (Revised) : Topics in Mathematics of Data Science (Fall 2015) Afonso S. BandeiraDocument6 pagini18.S096: Homework Problem Set 1 (Revised) : Topics in Mathematics of Data Science (Fall 2015) Afonso S. BandeiraAbdelrhman ShoeebÎncă nu există evaluări
- Tensor PDFDocument25 paginiTensor PDFPero PericÎncă nu există evaluări
- Homework 5 AMATH 301 UWDocument9 paginiHomework 5 AMATH 301 UWargo82Încă nu există evaluări
- Module 1-CMEEDocument25 paginiModule 1-CMEEyanith kumarÎncă nu există evaluări
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)De la EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Încă nu există evaluări
- Non Relativistic StringDocument17 paginiNon Relativistic StringAdam CrystalpasÎncă nu există evaluări
- 2008 Bookmatter FluidMechanics PDFDocument60 pagini2008 Bookmatter FluidMechanics PDFDaniela Forero RamírezÎncă nu există evaluări
- Algorithms Question BankDocument15 paginiAlgorithms Question BankPablo AhmedÎncă nu există evaluări
- 1 Transverse Vibration of A Taut String: X+DX XDocument22 pagini1 Transverse Vibration of A Taut String: X+DX XwenceslaoflorezÎncă nu există evaluări
- Additional Theory For Module 4: Dynamic Analysis: Eigensolution ExampleDocument7 paginiAdditional Theory For Module 4: Dynamic Analysis: Eigensolution ExamplephysicsnewblolÎncă nu există evaluări
- TMRCA EstimatesDocument9 paginiTMRCA Estimatesdavejphys100% (1)
- ProblemsDocument62 paginiProblemserad_5Încă nu există evaluări
- Principal Component Analysis: Methods Used by Hubley-Kosey Et Al., 2006Document10 paginiPrincipal Component Analysis: Methods Used by Hubley-Kosey Et Al., 2006RicardoÎncă nu există evaluări
- Seminar on Micro-Local Analysis. (AM-93), Volume 93De la EverandSeminar on Micro-Local Analysis. (AM-93), Volume 93Încă nu există evaluări
- Matrix Algebra For Beginners, Part III The Matrix ExponentialDocument9 paginiMatrix Algebra For Beginners, Part III The Matrix ExponentialPhine-hasÎncă nu există evaluări
- Week1 NewtonianDocument10 paginiWeek1 NewtonianシャルマチラグÎncă nu există evaluări
- Calculating A Path AlgorithmDocument13 paginiCalculating A Path AlgorithmredgoriyaÎncă nu există evaluări
- Consistent Superstrings: We Have Found Three Tachyon Free and Non-Anomalous Superstring TheoriesDocument55 paginiConsistent Superstrings: We Have Found Three Tachyon Free and Non-Anomalous Superstring TheoriesEvelinaÎncă nu există evaluări
- Algebras Advanced Lecture NoteDocument24 paginiAlgebras Advanced Lecture NoteHuong Cam ThuyÎncă nu există evaluări
- VI. Notes (Played) On The Vibrating StringDocument20 paginiVI. Notes (Played) On The Vibrating Stringjose2017Încă nu există evaluări
- CS 224 Problem Set 4 - SolutionsDocument3 paginiCS 224 Problem Set 4 - Solutionsfeng_ning_ding4153Încă nu există evaluări
- WEEK 8 Further Physics Solutions From Konrad HarradineDocument6 paginiWEEK 8 Further Physics Solutions From Konrad HarradineDulwich PhysicsÎncă nu există evaluări
- 18.085 Computational Science and Engineering I: Mit OpencoursewareDocument13 pagini18.085 Computational Science and Engineering I: Mit Opencoursewarealhakeeeem5369Încă nu există evaluări
- Interference and DiffractionDocument16 paginiInterference and DiffractionmumtazaliÎncă nu există evaluări
- Practice Sheet 3 SolutionsDocument8 paginiPractice Sheet 3 SolutionsJaspreetSinghÎncă nu există evaluări
- Matrixanalysis PDFDocument46 paginiMatrixanalysis PDFDzenis PucicÎncă nu există evaluări
- Thomas Greenspan-Stability of Lagrange PointsDocument9 paginiThomas Greenspan-Stability of Lagrange PointsVĩ AoÎncă nu există evaluări
- MATH110 Homework 10: OutlineDocument4 paginiMATH110 Homework 10: OutlineTaylor TamÎncă nu există evaluări
- Discrete Sine TransformDocument13 paginiDiscrete Sine TransformManuel FlorezÎncă nu există evaluări
- 263 HomeworkDocument153 pagini263 HomeworkHimanshu Saikia JÎncă nu există evaluări
- Section-3.8 Gauss JacobiDocument15 paginiSection-3.8 Gauss JacobiKanishka SainiÎncă nu există evaluări
- O DenotesDocument69 paginiO DenotesMustafa Hikmet Bilgehan UçarÎncă nu există evaluări
- Sixth Term Examination Papers Mathematics 3: Monday 23 June 2008Document8 paginiSixth Term Examination Papers Mathematics 3: Monday 23 June 2008hmphryÎncă nu există evaluări
- Practice Apx PDocument4 paginiPractice Apx PballechaseÎncă nu există evaluări
- Vector Calculus in Two DimensionsDocument27 paginiVector Calculus in Two DimensionsAndreea MoldoveanuÎncă nu există evaluări
- Module 5Document41 paginiModule 5cbgopinathÎncă nu există evaluări
- Adv Lab OscillatorsDocument12 paginiAdv Lab OscillatorsPeter John BolgertÎncă nu există evaluări
- 11 - Numerical Issues #1: The Complications of Continuity: V (X, T) That Maps From The Continuous Domain of X ToDocument24 pagini11 - Numerical Issues #1: The Complications of Continuity: V (X, T) That Maps From The Continuous Domain of X TonnikogÎncă nu există evaluări
- ECE Lab 2 102Document28 paginiECE Lab 2 102azimylabsÎncă nu există evaluări
- On The Sensitivities of Multiple Eigenvalues: Anton Evgrafov Dang Manh NguyenDocument5 paginiOn The Sensitivities of Multiple Eigenvalues: Anton Evgrafov Dang Manh Nguyenrs0004Încă nu există evaluări
- Theorist's Toolkit Lecture 9: High Dimensional Geometry (Continued) and VC-dimensionDocument8 paginiTheorist's Toolkit Lecture 9: High Dimensional Geometry (Continued) and VC-dimensionJeremyKunÎncă nu există evaluări
- Computer Network Homework HelpDocument12 paginiComputer Network Homework HelpComputer Network Assignment HelpÎncă nu există evaluări
- Algebraic Combinatorics - Po-Shen-Loh - MOP 2011Document5 paginiAlgebraic Combinatorics - Po-Shen-Loh - MOP 2011David DavidÎncă nu există evaluări
- Wave Particle DualityDocument9 paginiWave Particle DualitydjfordeÎncă nu există evaluări
- 7de, Uk: X (X 1 X 2 - . - XP)Document24 pagini7de, Uk: X (X 1 X 2 - . - XP)julian Caballero LópezÎncă nu există evaluări
- Application of PdeDocument25 paginiApplication of Pdesanoj kumarÎncă nu există evaluări
- Waves, The Wave Equation, and Phase Velocity: F (X) F (x-3) F (x-2) F (x-1)Document34 paginiWaves, The Wave Equation, and Phase Velocity: F (X) F (x-3) F (x-2) F (x-1)FarizalÎncă nu există evaluări
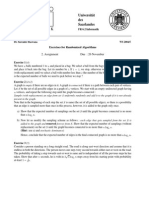
- Informatik: Universit at Des SaarlandesDocument2 paginiInformatik: Universit at Des SaarlandesvenugopalÎncă nu există evaluări
- Assign6 PsDocument2 paginiAssign6 PsvenugopalÎncă nu există evaluări
- Informatik: Universit at Des SaarlandesDocument1 paginăInformatik: Universit at Des SaarlandesvenugopalÎncă nu există evaluări
- Assign0 PsDocument2 paginiAssign0 PsvenugopalÎncă nu există evaluări
- Breast Cancer ChemotherapyDocument7 paginiBreast Cancer Chemotherapydini kusmaharaniÎncă nu există evaluări
- Statistical TestsDocument47 paginiStatistical TestsUche Nwa ElijahÎncă nu există evaluări
- Percy JacksonDocument13 paginiPercy JacksonDawn Marco0% (2)
- Adventures in Parenting RevDocument67 paginiAdventures in Parenting Revmakj_828049Încă nu există evaluări
- CardiologyDocument83 paginiCardiologyAshutosh SinghÎncă nu există evaluări
- Exposicion Verbos y AdverbiosDocument37 paginiExposicion Verbos y AdverbiosmonicaÎncă nu există evaluări
- ENG101 Final Term NOTES by VU LearningDocument15 paginiENG101 Final Term NOTES by VU LearningAbdul WahabÎncă nu există evaluări
- Mount Athos Plan - Healthy Living (PT 2)Document8 paginiMount Athos Plan - Healthy Living (PT 2)Matvat0100% (2)
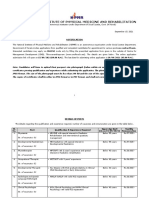
- NIPMR Notification v3Document3 paginiNIPMR Notification v3maneeshaÎncă nu există evaluări
- Improving Hands-On Experimentation Through Model Making and Rapid Prototyping: The Case of The University of Botswana's Industrial Design StudentsDocument6 paginiImproving Hands-On Experimentation Through Model Making and Rapid Prototyping: The Case of The University of Botswana's Industrial Design StudentsnaimshaikhÎncă nu există evaluări
- Test A NN4 2020-2021Document2 paginiTest A NN4 2020-2021Toska GilliesÎncă nu există evaluări
- Girl: Dad, I Need A Few Supplies For School, and I Was Wondering If - . .Document3 paginiGirl: Dad, I Need A Few Supplies For School, and I Was Wondering If - . .AKSHATÎncă nu există evaluări
- Fruitful Outreaches Intercessory Prayer GuidelinesDocument5 paginiFruitful Outreaches Intercessory Prayer GuidelinesPaul Moiloa100% (1)
- Simple Linear Regression Analysis: Mcgraw-Hill/IrwinDocument16 paginiSimple Linear Regression Analysis: Mcgraw-Hill/IrwinNaeem AyazÎncă nu există evaluări
- RH Control - SeracloneDocument2 paginiRH Control - Seraclonewendys rodriguez, de los santosÎncă nu există evaluări
- 2 Beginner 2nd GradeDocument12 pagini2 Beginner 2nd GradesebÎncă nu există evaluări
- 100 Commonly Asked Interview QuestionsDocument6 pagini100 Commonly Asked Interview QuestionsRaluca SanduÎncă nu există evaluări
- AVEVA Work Permit ManagerDocument2 paginiAVEVA Work Permit ManagerMohamed Refaat100% (1)
- Science Fiction FilmsDocument5 paginiScience Fiction Filmsapi-483055750Încă nu există evaluări
- Simplified Cost Accounting Part Ii: Solutions ManualDocument58 paginiSimplified Cost Accounting Part Ii: Solutions ManualAnthony Koko CarlobosÎncă nu există evaluări
- Lesson Plan Earth and Life Science: Exogenic ProcessesDocument2 paginiLesson Plan Earth and Life Science: Exogenic ProcessesNuevalyn Quijano FernandoÎncă nu există evaluări
- Fabre, Intro To Unfinished Quest of Richard WrightDocument9 paginiFabre, Intro To Unfinished Quest of Richard Wrightfive4booksÎncă nu există evaluări
- LabDocument11 paginiLableonora KrasniqiÎncă nu există evaluări
- Using NetshDocument2 paginiUsing NetshMohcin AllaouiÎncă nu există evaluări
- Lesson Plan 2 Revised - Morgan LegrandDocument19 paginiLesson Plan 2 Revised - Morgan Legrandapi-540805523Încă nu există evaluări
- Does Moore Succeed in Refuting IdealismDocument5 paginiDoes Moore Succeed in Refuting IdealismharryÎncă nu există evaluări
- Occ ST 1Document3 paginiOcc ST 1Rona Marie BulaongÎncă nu există evaluări
- Foreign Laguage Teaching - Nzjournal - 15.1wiechertDocument4 paginiForeign Laguage Teaching - Nzjournal - 15.1wiechertNicole MichelÎncă nu există evaluări
- Tutor InvoiceDocument13 paginiTutor InvoiceAbdullah NHÎncă nu există evaluări