S-ar putea să vă placă și
- Motion ReportDocument2 paginiMotion Reportmikeb-erau100% (2)
- Studio4 - LEED - Green - Associate - Study - Guide - Master 2nd Edition PDFDocument310 paginiStudio4 - LEED - Green - Associate - Study - Guide - Master 2nd Edition PDFyu zhangÎncă nu există evaluări
- APM Autopilot Setup Using SimulinkDocument48 paginiAPM Autopilot Setup Using SimulinkKiran Raghuram IyengarÎncă nu există evaluări
- JSN SR04T 2.0Document4 paginiJSN SR04T 2.0JederVieira100% (1)
- Stationary Concrete Pumps en G 16345-0 PDFDocument20 paginiStationary Concrete Pumps en G 16345-0 PDFLUIS ISAAC LEON PAROÎncă nu există evaluări
- Arduino Radar Source CodeDocument9 paginiArduino Radar Source CodeRushikesh PatilÎncă nu există evaluări
- Gyro Camera For Motorcycle Using ArduinoDocument8 paginiGyro Camera For Motorcycle Using ArduinoCUIDAITOÎncă nu există evaluări
- Sensores ArduinoDocument22 paginiSensores Arduinoslifer561Încă nu există evaluări
- Title Sensors and Actuators With Arduino UNO Theory: InterfacingDocument7 paginiTitle Sensors and Actuators With Arduino UNO Theory: Interfacingdipali shendeÎncă nu există evaluări
- For Program: VDD Ice - Dat Ice - CLK Reset GNDDocument1 paginăFor Program: VDD Ice - Dat Ice - CLK Reset GNDBu As100% (1)
- Marker Beacon (Wikipedia Reference)Document4 paginiMarker Beacon (Wikipedia Reference)Avinash NagÎncă nu există evaluări
- Arduino Radar ProjectDocument10 paginiArduino Radar ProjectJesus Mamani100% (2)
- Build a 2M Moxon Antenna for ARES UseDocument14 paginiBuild a 2M Moxon Antenna for ARES UseKenburÎncă nu există evaluări
- The DSE Radio Direction Finder PDFDocument4 paginiThe DSE Radio Direction Finder PDFlazarosÎncă nu există evaluări
- Arduino Wireless Servo Motor Control using RF24Network LibraryDocument9 paginiArduino Wireless Servo Motor Control using RF24Network LibraryVivi FebrianaÎncă nu există evaluări
- Flex SensorDocument6 paginiFlex SensorsanjibnandaÎncă nu există evaluări
- G - Appliances & LightingDocument14 paginiG - Appliances & LightingRadio PartsÎncă nu există evaluări
- Arduino Info Nrf24L01 2.4GHz HowToDocument23 paginiArduino Info Nrf24L01 2.4GHz HowToDirane MiguehÎncă nu există evaluări
- PICAXE Powered CW BeaconsDocument7 paginiPICAXE Powered CW BeaconsAmp AunyamoneÎncă nu există evaluări
- Arduino Based RadarDocument8 paginiArduino Based RadarMuhammad Farhan PutraÎncă nu există evaluări
- Design and Development of A Robotic Drone A Drover.Document14 paginiDesign and Development of A Robotic Drone A Drover.IJRASETPublicationsÎncă nu există evaluări
- Arduino Shield ManualDocument24 paginiArduino Shield Manualzhalim2001Încă nu există evaluări
- Servo Motors Control Using ArduinoDocument6 paginiServo Motors Control Using ArduinoAhmad Sadam SyaeroziÎncă nu există evaluări
- Digital Storage Oscilloscope (Simplified Version)Document9 paginiDigital Storage Oscilloscope (Simplified Version)Sturovo TurboÎncă nu există evaluări
- Control A DC Motor With Arduino and l293d ChipDocument6 paginiControl A DC Motor With Arduino and l293d Chipapi-115728880Încă nu există evaluări
- lcd1 PDFDocument6 paginilcd1 PDFddvp_gunawardana100% (1)
- GPS Neo-6m-V12 SCHDocument1 paginăGPS Neo-6m-V12 SCHKwok Chung Chu100% (1)
- Interface VGA80x40: VHDL MacroDocument4 paginiInterface VGA80x40: VHDL MacroSwan RavindraÎncă nu există evaluări
- Rotary EncoderDocument8 paginiRotary EncoderHassan Elkholy100% (1)
- What Is Speaker ?Document3 paginiWhat Is Speaker ?Siva ViratÎncă nu există evaluări
- Bluetooth HC-05, HC-06 Commands Mode and AT CommandsDocument5 paginiBluetooth HC-05, HC-06 Commands Mode and AT CommandsOnofre Enriquez Fercito Leito100% (1)
- ESE 111 Lab 4 - LCDs, Accelerometers, TimersDocument8 paginiESE 111 Lab 4 - LCDs, Accelerometers, TimersAlmahdiSalehÎncă nu există evaluări
- I586 1s Series Users Manual en PDFDocument820 paginiI586 1s Series Users Manual en PDFAle MariaÎncă nu există evaluări
- Edn Design Ideas IIIDocument5 paginiEdn Design Ideas IIIagmnm1962100% (2)
- HC05 BluetoothDocument16 paginiHC05 BluetoothDaniel Eneas Calderon RodriguezÎncă nu există evaluări
- TMS320C6748 DSP BOARD Package ContentDocument22 paginiTMS320C6748 DSP BOARD Package ContentPrangya PradhanÎncă nu există evaluări
- Seminar Report On Missile Detection SystemDocument26 paginiSeminar Report On Missile Detection SystemSaurabh SinghÎncă nu există evaluări
- Print Page - Ov7670 With Both Arduino Uno and Now MegaDocument60 paginiPrint Page - Ov7670 With Both Arduino Uno and Now MegaAhmad Arif Sakti100% (1)
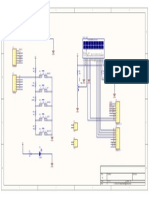
- 1602 LCD Shield SCH PDFDocument1 pagină1602 LCD Shield SCH PDFJorge Luis Vega Caballero100% (1)
- Smart Car Parking System Using Arduino UNODocument8 paginiSmart Car Parking System Using Arduino UNOIJRASETPublicationsÎncă nu există evaluări
- NRF24L01 Arduino Interfacing - Wireless Communication1Document24 paginiNRF24L01 Arduino Interfacing - Wireless Communication1Kishore Vennela0% (1)
- Wireless Joystick For Arduino Robot Car With nRF24L01Document23 paginiWireless Joystick For Arduino Robot Car With nRF24L01chafic WEISSÎncă nu există evaluări
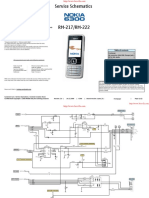
- 6300 Schematics Box-Flx PDFDocument11 pagini6300 Schematics Box-Flx PDFosama younesÎncă nu există evaluări
- Esp32 Schematic PrintsDocument1 paginăEsp32 Schematic PrintsMohammad Reza MiM100% (2)
- Documents - MX - User Guide 5584479c4dc7b PDFDocument66 paginiDocuments - MX - User Guide 5584479c4dc7b PDFmikadoturkÎncă nu există evaluări
- Electronic Load and Other Circuit IdeasDocument6 paginiElectronic Load and Other Circuit Ideasanees_172000100% (1)
- Smart car manual ultrasonic obstacle avoidanceDocument30 paginiSmart car manual ultrasonic obstacle avoidanceJens PerssonÎncă nu există evaluări
- Block Diagram of Infrared Remote Control SwitchDocument4 paginiBlock Diagram of Infrared Remote Control SwitchminthooÎncă nu există evaluări
- Arduino TimerDocument16 paginiArduino TimerAhnaf HassanÎncă nu există evaluări
- Arduino Infrared Collision Avoidance: Pin, Control Indicator DescriptionDocument3 paginiArduino Infrared Collision Avoidance: Pin, Control Indicator DescriptionApocalypse100% (1)
- LCD KeyPad Shield - IntroductionDocument5 paginiLCD KeyPad Shield - IntroductionKroscop San Martin de LunaÎncă nu există evaluări
- 3Dr Radio: Quick Start GuideDocument4 pagini3Dr Radio: Quick Start GuideLuiz Eduardo PinheiroÎncă nu există evaluări
- LV MaxSonar EZ DatasheetDocument12 paginiLV MaxSonar EZ DatasheetOscar Maldonado100% (3)
- Automatic RainDocument4 paginiAutomatic Rainmahidej823Încă nu există evaluări
- Chapter 7 and 8Document12 paginiChapter 7 and 8Amruta AvhaleÎncă nu există evaluări
- Ultrasonic Sensor HC-SR04 and Arduino TutorialDocument5 paginiUltrasonic Sensor HC-SR04 and Arduino Tutorialmax100% (2)
- Individual Project Documentation by LEE HAO YIDocument14 paginiIndividual Project Documentation by LEE HAO YIJoshuaÎncă nu există evaluări
- Team22 ReportDocument20 paginiTeam22 ReporthimeÎncă nu există evaluări
- SMART Dustbin Materials and Making of ItDocument9 paginiSMART Dustbin Materials and Making of ItAbdallaÎncă nu există evaluări
- Project 10 MOTION ALARMDocument6 paginiProject 10 MOTION ALARMDarwin VargasÎncă nu există evaluări
- Ece ReportDocument8 paginiEce ReportSharanya SinghÎncă nu există evaluări
- 20BCS1029 Iot 5Document5 pagini20BCS1029 Iot 5hustle bustleÎncă nu există evaluări
- Arduino and HC-SR04 Ultrasonic SensorDocument11 paginiArduino and HC-SR04 Ultrasonic SensorVarli ArsolÎncă nu există evaluări
- 096 Mini Color OledDocument17 pagini096 Mini Color OledLuca AlbertiÎncă nu există evaluări
- Wooden Gear Clock Instructions 10-2 PDFDocument78 paginiWooden Gear Clock Instructions 10-2 PDFLuca Alberti50% (2)
- VDGDocument5 paginiVDGLuca AlbertiÎncă nu există evaluări
- PIC Lab ManualDocument47 paginiPIC Lab ManualCarlos Marinho Silva92% (12)
- JTE WrenTurboPropDocument117 paginiJTE WrenTurboProphariprasadr5199100% (1)
- Experiment Labview ArduinoDocument7 paginiExperiment Labview ArduinoLuca AlbertiÎncă nu există evaluări
- Rational Irrational HandoutDocument88 paginiRational Irrational HandoutLuca AlbertiÎncă nu există evaluări
- Cockcroft-Walton Voltage-Multiplier Circuit GeneratorDocument3 paginiCockcroft-Walton Voltage-Multiplier Circuit GeneratorLuca Alberti0% (1)
- Wooden Gear Clock Instructions 10-2Document34 paginiWooden Gear Clock Instructions 10-2Luca AlbertiÎncă nu există evaluări
- SignsDocument46 paginiSignsLuca AlbertiÎncă nu există evaluări
- Arduino ProjectsDocument46 paginiArduino Projectstecnojorge100% (7)
- Signs 4Document35 paginiSigns 4Luca AlbertiÎncă nu există evaluări
- Signs 3Document36 paginiSigns 3Luca Alberti100% (1)
- Signs 2Document48 paginiSigns 2Luca AlbertiÎncă nu există evaluări
- Wooden Gear ClockDocument10 paginiWooden Gear ClockLuca Alberti0% (1)
- SignsDocument46 paginiSignsLuca AlbertiÎncă nu există evaluări
- Wooden Gear ClockDocument10 paginiWooden Gear ClockLuca Alberti0% (1)
- Sample Purchase Specification For ClariflocculatorDocument1 paginăSample Purchase Specification For Clariflocculatorcontactdevansh1174Încă nu există evaluări
- Calgon Tech SpecDocument4 paginiCalgon Tech SpecDanStratoÎncă nu există evaluări
- Unit-I: Introduction To J2EEDocument29 paginiUnit-I: Introduction To J2EEsurakshaÎncă nu există evaluări
- Catalog Advantys AS-I IP20-IP67 - 803510 - DIA3ED2040909EN - 200408Document30 paginiCatalog Advantys AS-I IP20-IP67 - 803510 - DIA3ED2040909EN - 200408Jean MarzanÎncă nu există evaluări
- BTS Training Fiber Optic Advanced SplicingDocument5 paginiBTS Training Fiber Optic Advanced Splicingjama99Încă nu există evaluări
- DR System ConciseDocument37 paginiDR System ConciseJiten KarmakarÎncă nu există evaluări
- Assessment Clo1 Clo2 Clo3 Clo4 Clo5 Plo1 Plo2 Plo2 Plo1Document12 paginiAssessment Clo1 Clo2 Clo3 Clo4 Clo5 Plo1 Plo2 Plo2 Plo1Ma Liu Hun VuiÎncă nu există evaluări
- Control Fixed Bed ReactorsDocument4 paginiControl Fixed Bed ReactorsAddison JuttieÎncă nu există evaluări
- Equilibrium of A Particle, The Free-Body Diagram & Coplanar Force SystemsDocument24 paginiEquilibrium of A Particle, The Free-Body Diagram & Coplanar Force SystemsAtef NazÎncă nu există evaluări
- Assignment - Iv Examples of Design of Transformer: W 2 M 2 T W WDocument1 paginăAssignment - Iv Examples of Design of Transformer: W 2 M 2 T W Wiamketul6340Încă nu există evaluări
- Grounding Vs BondingDocument2 paginiGrounding Vs BondingVictor HutahaeanÎncă nu există evaluări
- Determining The Redundancy FactorDocument6 paginiDetermining The Redundancy FactorEdris Salehi GolsefidiÎncă nu există evaluări
- Vinay Quality ResumeDocument3 paginiVinay Quality Resumevinay kumarÎncă nu există evaluări
- The Tallest Buildings in The WorldDocument2 paginiThe Tallest Buildings in The WorldW4G8989Încă nu există evaluări
- Guidelines For Planning Childcare Centers & Playground DesignDocument15 paginiGuidelines For Planning Childcare Centers & Playground Design105auco100% (1)
- Lec 958975Document19 paginiLec 958975Rajasekar PichaimuthuÎncă nu există evaluări
- Power and Simplicity: Pace ScientificDocument16 paginiPower and Simplicity: Pace ScientificAnonymous mNQq7ojÎncă nu există evaluări
- Online Institute Reporting Slip of The Application Number - 200310422837 PDFDocument1 paginăOnline Institute Reporting Slip of The Application Number - 200310422837 PDFRohith RohanÎncă nu există evaluări
- Galvanize Galvanize Business Unit: Trust Us To GalvanizeDocument6 paginiGalvanize Galvanize Business Unit: Trust Us To GalvanizeAdet WildanÎncă nu există evaluări
- XHLE Long Coupled Centrifugal Pump EnglishDocument8 paginiXHLE Long Coupled Centrifugal Pump Englishgagi1994brahimÎncă nu există evaluări
- ReleDocument3 paginiRelevitor4santos_6Încă nu există evaluări
- Customer Targeted E-CommerceDocument4 paginiCustomer Targeted E-CommercepriyaÎncă nu există evaluări
- Grounding and JumperingDocument16 paginiGrounding and Jumperingferreiramarco56Încă nu există evaluări
- Master Opp GaveDocument84 paginiMaster Opp GaveRizki Al AyyubiÎncă nu există evaluări
- Dow Corning (R) 200 Fluid, 50 Cst.Document11 paginiDow Corning (R) 200 Fluid, 50 Cst.Sergio Gonzalez GuzmanÎncă nu există evaluări
- Munsell Color Charts and GaugesDocument2 paginiMunsell Color Charts and GaugesMario DalengkadeÎncă nu există evaluări
- Staircase Preliminary Design Based On NBC and IS CodeDocument10 paginiStaircase Preliminary Design Based On NBC and IS CodeEducation. HubÎncă nu există evaluări