S-ar putea să vă placă și
- 2nd OfficerDocument26 pagini2nd Officerryann0599Încă nu există evaluări
- Piloting, Seamanship and Small Boat Handling - Vol. VDe la EverandPiloting, Seamanship and Small Boat Handling - Vol. VEvaluare: 5 din 5 stele5/5 (2)
- S5.1 IntroductionDocument7 paginiS5.1 IntroductionzikriÎncă nu există evaluări
- Crisis ManagementDocument14 paginiCrisis ManagementJayesh SolaskarÎncă nu există evaluări
- At Sea, The Mate On Watch Has Three: Able Seamen Helmsman LookoutDocument14 paginiAt Sea, The Mate On Watch Has Three: Able Seamen Helmsman LookoutSIDDHARTH MOHANTYÎncă nu există evaluări
- 3off InterviewDocument13 pagini3off InterviewStar Joe100% (5)
- IntrerviewDocument7 paginiIntrerviewTako Nutsubidze100% (1)
- Master'S Standing Orders: Require Additional PersonnelDocument5 paginiMaster'S Standing Orders: Require Additional Personnelmolahy100% (1)
- Chapter 6 - 10Document26 paginiChapter 6 - 10kennyÎncă nu există evaluări
- OOW ORAL Flash Card NotesDocument98 paginiOOW ORAL Flash Card NotesTyrone Sharp100% (4)
- AnchorDocument8 paginiAnchorwaihtet100% (1)
- Captain Harun - MASTER ORALS Answers - Docx-1Document22 paginiCaptain Harun - MASTER ORALS Answers - Docx-1yousudz100% (5)
- CIRCULAR NavigationDocument2 paginiCIRCULAR NavigationionxescuÎncă nu există evaluări
- How Can We Prevent Collision at Sea?Document5 paginiHow Can We Prevent Collision at Sea?Haeisy SimsuangcoÎncă nu există evaluări
- Class 1 CoC Deck SingaporeDocument66 paginiClass 1 CoC Deck SingaporeImran Alam Satti100% (7)
- MGN 210 - Flooding of Forward CompartmentsDocument4 paginiMGN 210 - Flooding of Forward CompartmentsDee CeeÎncă nu există evaluări
- Master'S Standing Orders: Require Additional PersonnelDocument5 paginiMaster'S Standing Orders: Require Additional PersonnelmolahyÎncă nu există evaluări
- MSC.1-Circ.707 - Guidance To The Master For Avoiding DangerousSituations in Following and Quartering Seas (Secretariat) PDFDocument14 paginiMSC.1-Circ.707 - Guidance To The Master For Avoiding DangerousSituations in Following and Quartering Seas (Secretariat) PDFhugh7777Încă nu există evaluări
- Describe Duties and Responsibilities of Navigating Officer at Sea. What Action Will You Take If Visibility Is Poor?Document22 paginiDescribe Duties and Responsibilities of Navigating Officer at Sea. What Action Will You Take If Visibility Is Poor?tybscnsÎncă nu există evaluări
- Chief Mate Phase 2 Exams SyllabusDocument7 paginiChief Mate Phase 2 Exams Syllabusamit anandÎncă nu există evaluări
- Materi FaizalDocument7 paginiMateri FaizalM.Rifaldi I.Ahmad100% (1)
- Actions To Be Taken Following A CollisionDocument37 paginiActions To Be Taken Following A CollisionSalvador Jr. Besares100% (5)
- Coc ExamDocument45 paginiCoc Examsaif100% (1)
- MLC f4 3Document5 paginiMLC f4 3harry stamperÎncă nu există evaluări
- Emergency Towing Booklet-EngDocument24 paginiEmergency Towing Booklet-Engaktugship100% (1)
- Operational Work Based Learning Passage PlanningDocument17 paginiOperational Work Based Learning Passage Planningnav100% (1)
- Project D3 - Bridge Team, Navigation, Passage Planning, Brem PavloDocument19 paginiProject D3 - Bridge Team, Navigation, Passage Planning, Brem PavloПавел Брем100% (1)
- VTS For StudentsDocument6 paginiVTS For StudentsNitin MeghwalÎncă nu există evaluări
- A. Waterway Engineering SubsystemDocument11 paginiA. Waterway Engineering Subsystemipman99Încă nu există evaluări
- Ship Board Oil Pollution Emergency Plan (SOPEPDocument63 paginiShip Board Oil Pollution Emergency Plan (SOPEPtaribra0% (1)
- Ecdis - Aramco RuleDocument6 paginiEcdis - Aramco RuleMarlinTest TERBARUÎncă nu există evaluări
- Notes For OralDocument58 paginiNotes For OralLynton Menezes100% (1)
- Name: Parañal, Efren Ivan Hero B. Bsmt-2BDocument6 paginiName: Parañal, Efren Ivan Hero B. Bsmt-2BNiala AlmarioÎncă nu există evaluări
- 2M ARAMCO Questions 2024 Final UpdateDocument16 pagini2M ARAMCO Questions 2024 Final Updateloai allamÎncă nu există evaluări
- A Master's Guide To Berthing 2nd EditionDocument40 paginiA Master's Guide To Berthing 2nd Editionanil.rai67% (3)
- 9 DWDocument16 pagini9 DWatejoy12jesuscaresÎncă nu există evaluări
- Bridge Watch Keeping Folr 34Document57 paginiBridge Watch Keeping Folr 34Roshan MaindanÎncă nu există evaluări
- Soal Latihan Plotting Perusahaan KapalDocument7 paginiSoal Latihan Plotting Perusahaan KapalAzis HarDikaÎncă nu există evaluări
- Keadaan Darurat Di Atas KapalDocument5 paginiKeadaan Darurat Di Atas KapalWosf TanagraÎncă nu există evaluări
- UK Masters OralsDocument74 paginiUK Masters OralsRaphael Belano Briones100% (3)
- Passage Planning - Solas RelatedDocument7 paginiPassage Planning - Solas RelatedPL BALASUBRAMANIANÎncă nu există evaluări
- EM II, s1, PDFDocument30 paginiEM II, s1, PDFAbduraman LeventÎncă nu există evaluări
- Bridge WatchKeeping EmergenciesDocument15 paginiBridge WatchKeeping EmergenciesBehendu PereraÎncă nu există evaluări
- Chart Work PointsDocument8 paginiChart Work PointsIMI DNS 20100% (2)
- Master KaptanlıkDocument42 paginiMaster KaptanlıkCelal Bozdogan100% (1)
- Guidelines For Safe AnchoringDocument7 paginiGuidelines For Safe Anchoringziqiang liÎncă nu există evaluări
- NAVIGATION SolutionDocument40 paginiNAVIGATION SolutionMd Monir Hossain100% (2)
- Novikontas Maritime College: Shipboard Oil Pollution Emergency PlanDocument14 paginiNovikontas Maritime College: Shipboard Oil Pollution Emergency PlanДенис КалининÎncă nu există evaluări
- A Master's Guide To Berthing (2ndedition)Document40 paginiA Master's Guide To Berthing (2ndedition)ldaels50% (2)
- WEEK 14 Ship Contingency Plan Part 1Document44 paginiWEEK 14 Ship Contingency Plan Part 1Brianss Ayangss100% (1)
- Additional Stuffs OOWDocument57 paginiAdditional Stuffs OOWMandy Conquers100% (7)
- Maritime English, An III Sem I IfrDocument48 paginiMaritime English, An III Sem I IfrCazan Ginel100% (1)
- Man Overboard System - ReportDocument12 paginiMan Overboard System - ReportJae Hun KimÎncă nu există evaluări
- SAILING PASSAGE HandoutDocument12 paginiSAILING PASSAGE HandoutSidharth PrakashÎncă nu există evaluări
- ImportantDocument176 paginiImportantStephanie Cui Silva100% (1)
- Emergency Responses in MarineDocument30 paginiEmergency Responses in MarineSaurabDAce100% (2)
- Communication Urgency, SafetyDocument15 paginiCommunication Urgency, SafetyStevien HendryanÎncă nu există evaluări
- Good Anchoring Practice - SkuldDocument7 paginiGood Anchoring Practice - SkuldJerzy IdzikowskiÎncă nu există evaluări
- Tutorial 8Document9 paginiTutorial 8Rupesh KumarÎncă nu există evaluări
- Capt. Sangam: Prakash DanuDocument32 paginiCapt. Sangam: Prakash DanuRupesh KumarÎncă nu există evaluări
- Note - at Harbr, TSS Radar May Be Unreliable Due To Frequent Change Course and Speed Right Handed PropellerDocument2 paginiNote - at Harbr, TSS Radar May Be Unreliable Due To Frequent Change Course and Speed Right Handed PropellerRupesh KumarÎncă nu există evaluări
- NotesDocument16 paginiNotesRupesh KumarÎncă nu există evaluări
- Group 1 Tanker Loading and UnloadingDocument37 paginiGroup 1 Tanker Loading and UnloadingRupesh Kumar100% (5)
- Group 1 Tanker Loading and UnloadingDocument37 paginiGroup 1 Tanker Loading and UnloadingRupesh Kumar100% (5)
- Group 1 Tanker Loading and UnloadingDocument37 paginiGroup 1 Tanker Loading and UnloadingRupesh Kumar100% (5)
- Course Course Time TableTime TableDocument1 paginăCourse Course Time TableTime TableRupesh KumarÎncă nu există evaluări
- Oow Couse Information (Ljmu)Document23 paginiOow Couse Information (Ljmu)Rupesh KumarÎncă nu există evaluări
- SolutionDocument4 paginiSolutionRupesh KumarÎncă nu există evaluări
- Voy 58 PSG PLNGSTDocument19 paginiVoy 58 PSG PLNGSTRupesh Kumar100% (1)
- SMA FormulaDocument1 paginăSMA FormulaRupesh KumarÎncă nu există evaluări
- SquatDocument2 paginiSquatRupesh Kumar100% (1)
- Course Course Time TableTime TableDocument1 paginăCourse Course Time TableTime TableRupesh KumarÎncă nu există evaluări
- Sea Service Testimonial For Deck Officer (As Per MCA)Document1 paginăSea Service Testimonial For Deck Officer (As Per MCA)Rupesh Kumar100% (1)
- Signalling EquipmentDocument1 paginăSignalling EquipmentRupesh KumarÎncă nu există evaluări
- SCBA RequirementDocument1 paginăSCBA RequirementRupesh KumarÎncă nu există evaluări
- NPD and VMSDocument4 paginiNPD and VMSK V S MadaanÎncă nu există evaluări
- EPLC Annual Operational Analysis TemplateDocument8 paginiEPLC Annual Operational Analysis TemplateHussain ElarabiÎncă nu există evaluări
- Rubberworld (Phils.), Inc. v. NLRCDocument2 paginiRubberworld (Phils.), Inc. v. NLRCAnjÎncă nu există evaluări
- Chapter 1 To 23 Ques-AnswersDocument13 paginiChapter 1 To 23 Ques-AnswersRasha83% (12)
- Nursing Law and JurisprudenceDocument9 paginiNursing Law and JurisprudenceKaren Mae Santiago AlcantaraÎncă nu există evaluări
- 131.3 Visa Requirements General 2016 10 PDFDocument2 pagini131.3 Visa Requirements General 2016 10 PDFDilek YILMAZÎncă nu există evaluări
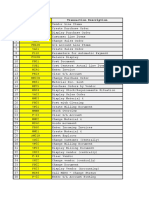
- # Transaction Code Transaction DescriptionDocument6 pagini# Transaction Code Transaction DescriptionVivek Shashikant SonawaneÎncă nu există evaluări
- Rebecca Sanchez Resume 2016Document2 paginiRebecca Sanchez Resume 2016api-311997473Încă nu există evaluări
- Ilm-e-Hadees Sikhne Wale Ke Liye Kuch AadaabDocument5 paginiIlm-e-Hadees Sikhne Wale Ke Liye Kuch AadaabSalman KhanÎncă nu există evaluări
- Formation Burgos RefozarDocument10 paginiFormation Burgos RefozarJasmine ActaÎncă nu există evaluări
- Domain of Dread - HisthavenDocument17 paginiDomain of Dread - HisthavenJuliano Barbosa Ferraro0% (1)
- Vampire - Habent Sua Fata Libelli - by Hanns Heinz EwersDocument2 paginiVampire - Habent Sua Fata Libelli - by Hanns Heinz EwersJoe E BandelÎncă nu există evaluări
- Land Use Management (LUMDocument25 paginiLand Use Management (LUMgopumgÎncă nu există evaluări
- True West - April 2016Document149 paginiTrue West - April 2016Rodrigo Moya100% (4)
- Counselling Adults With Learning Disabilities Basic Texts in Counselling and PsychotherapyDocument207 paginiCounselling Adults With Learning Disabilities Basic Texts in Counselling and PsychotherapyCristinaMarinÎncă nu există evaluări
- Unit Test 7A: 1 Choose The Correct Form of The VerbDocument4 paginiUnit Test 7A: 1 Choose The Correct Form of The VerbAmy PuenteÎncă nu există evaluări
- Capacity Planning FinalizeDocument85 paginiCapacity Planning FinalizeHansel Ramirez BaruelaÎncă nu există evaluări
- PAIN POINTS - Can Be Conscious (Actual Demand) or Unconscious (Latent Demand) That CanDocument8 paginiPAIN POINTS - Can Be Conscious (Actual Demand) or Unconscious (Latent Demand) That CanGeorge PaulÎncă nu există evaluări
- FIRST YEAR B.TECH - 2020 Student List (MGT and CET) PDFDocument128 paginiFIRST YEAR B.TECH - 2020 Student List (MGT and CET) PDFakashÎncă nu există evaluări
- Same Tractor Silver 80-85-90 105 160 180 Parts CatalogDocument17 paginiSame Tractor Silver 80-85-90 105 160 180 Parts Catalogalicebrewer210188ktm100% (64)
- Sartre On FreedomDocument32 paginiSartre On Freedomolmhrs libraryÎncă nu există evaluări
- 5.2.1 List of Placed Students VESIT NAAC TPCDocument154 pagini5.2.1 List of Placed Students VESIT NAAC TPCRashmi RanjanÎncă nu există evaluări
- REM1Document48 paginiREM1Jem MadridÎncă nu există evaluări
- African Diaspora in IndiaDocument24 paginiAfrican Diaspora in Indiafanm_belÎncă nu există evaluări
- Scout-Handbook Eng PDFDocument11 paginiScout-Handbook Eng PDFTai Nguyen DucÎncă nu există evaluări
- Koalatext 4Document8 paginiKoalatext 4YolandaOrduñaÎncă nu există evaluări
- 1 - Blank Financial AppendixDocument57 pagini1 - Blank Financial AppendixJax TellerÎncă nu există evaluări
- Vayu Issue Vayu Issue III May Jun 2018Document116 paginiVayu Issue Vayu Issue III May Jun 2018vs_3457000Încă nu există evaluări
- Devel Goth ArchDocument512 paginiDevel Goth ArchAmiee Groundwater100% (2)
- AsdsaDocument47 paginiAsdsaColin McCulloughÎncă nu există evaluări
- Transformed: Moving to the Product Operating ModelDe la EverandTransformed: Moving to the Product Operating ModelEvaluare: 4 din 5 stele4/5 (1)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tDe la EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tEvaluare: 4.5 din 5 stele4.5/5 (27)
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureDe la EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureEvaluare: 4.5 din 5 stele4.5/5 (2)
- Well Integrity for Workovers and RecompletionsDe la EverandWell Integrity for Workovers and RecompletionsEvaluare: 5 din 5 stele5/5 (3)
- Asphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsDe la EverandAsphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsÎncă nu există evaluări
- A Practical Handbook for Drilling Fluids ProcessingDe la EverandA Practical Handbook for Drilling Fluids ProcessingÎncă nu există evaluări
- Advanced Production Decline Analysis and ApplicationDe la EverandAdvanced Production Decline Analysis and ApplicationEvaluare: 3.5 din 5 stele3.5/5 (4)
- The Design Thinking Playbook: Mindful Digital Transformation of Teams, Products, Services, Businesses and EcosystemsDe la EverandThe Design Thinking Playbook: Mindful Digital Transformation of Teams, Products, Services, Businesses and EcosystemsÎncă nu există evaluări
- Analog Design and Simulation Using OrCAD Capture and PSpiceDe la EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceÎncă nu există evaluări
- Articulating Design Decisions: Communicate with Stakeholders, Keep Your Sanity, and Deliver the Best User ExperienceDe la EverandArticulating Design Decisions: Communicate with Stakeholders, Keep Your Sanity, and Deliver the Best User ExperienceEvaluare: 4 din 5 stele4/5 (19)
- The Age of Agile: How Smart Companies Are Transforming the Way Work Gets DoneDe la EverandThe Age of Agile: How Smart Companies Are Transforming the Way Work Gets DoneEvaluare: 4.5 din 5 stele4.5/5 (5)
- Heat Exchanger Design Guide: A Practical Guide for Planning, Selecting and Designing of Shell and Tube ExchangersDe la EverandHeat Exchanger Design Guide: A Practical Guide for Planning, Selecting and Designing of Shell and Tube ExchangersEvaluare: 4 din 5 stele4/5 (13)
- The Jobs To Be Done Playbook: Align Your Markets, Organization, and Strategy Around Customer NeedsDe la EverandThe Jobs To Be Done Playbook: Align Your Markets, Organization, and Strategy Around Customer NeedsEvaluare: 5 din 5 stele5/5 (1)
- Internal Combustion: How Corporations and Governments Addicted the World to Oil and Subverted the AlternativesDe la EverandInternal Combustion: How Corporations and Governments Addicted the World to Oil and Subverted the AlternativesEvaluare: 4 din 5 stele4/5 (2)
- Design for How People Think: Using Brain Science to Build Better ProductsDe la EverandDesign for How People Think: Using Brain Science to Build Better ProductsEvaluare: 4 din 5 stele4/5 (8)
- 507 Mechanical Movements: Mechanisms and DevicesDe la Everand507 Mechanical Movements: Mechanisms and DevicesEvaluare: 4 din 5 stele4/5 (28)
- Flow Analysis for Hydrocarbon Pipeline EngineeringDe la EverandFlow Analysis for Hydrocarbon Pipeline EngineeringÎncă nu există evaluări
- The Maker's Field Guide: The Art & Science of Making Anything ImaginableDe la EverandThe Maker's Field Guide: The Art & Science of Making Anything ImaginableÎncă nu există evaluări
- Lean vs Agile vs Design Thinking: What You Really Need to Know to Build High-Performing Digital Product TeamsDe la EverandLean vs Agile vs Design Thinking: What You Really Need to Know to Build High-Performing Digital Product TeamsEvaluare: 4 din 5 stele4/5 (2)
- Laws of UX: Using Psychology to Design Better Products & ServicesDe la EverandLaws of UX: Using Psychology to Design Better Products & ServicesEvaluare: 5 din 5 stele5/5 (9)
- Pocket Guide to Flanges, Fittings, and Piping DataDe la EverandPocket Guide to Flanges, Fittings, and Piping DataEvaluare: 3.5 din 5 stele3.5/5 (22)