S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Cungte's ThesisDocument84 paginiCungte's Thesisapi-3804018Încă nu există evaluări
- Staying On TrackDocument2 paginiStaying On TrackcarolatuÎncă nu există evaluări
- Rajarajeshwari AshtakamDocument2 paginiRajarajeshwari AshtakamK TÎncă nu există evaluări
- Aave WorksheetDocument4 paginiAave Worksheetapi-253665840Încă nu există evaluări
- 640-461 Ccna Voice DumpDocument64 pagini640-461 Ccna Voice DumpGustavo ScÎncă nu există evaluări
- Language Revision GuideDocument25 paginiLanguage Revision GuideSereen KhanÎncă nu există evaluări
- MacKenzie - Vanguard Lying DownDocument7 paginiMacKenzie - Vanguard Lying DownSergey MinovÎncă nu există evaluări
- Year5 Test1Document17 paginiYear5 Test1gracamoraisÎncă nu există evaluări
- Excel TrainingDocument23 paginiExcel TrainingsefanitÎncă nu există evaluări
- HCL - Avon: Guatemala Site ManualDocument17 paginiHCL - Avon: Guatemala Site ManualKevin Ariel AlvarengaÎncă nu există evaluări
- CLP Talk 10 (Growing in The Spirit)Document48 paginiCLP Talk 10 (Growing in The Spirit)Ronie ColomaÎncă nu există evaluări
- Learner's Activity Sheet: MAPEH Arts (Quarter IV - Week 3)Document5 paginiLearner's Activity Sheet: MAPEH Arts (Quarter IV - Week 3)JOy RaÎncă nu există evaluări
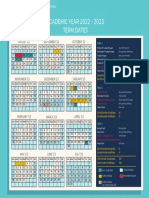
- BVIS Calendar 22-23Document1 paginăBVIS Calendar 22-23SÁI PHUÎncă nu există evaluări
- Catalogue (HB) HINDIDocument64 paginiCatalogue (HB) HINDIAbhijeet JhaÎncă nu există evaluări
- Pronoun (Basic) (Part-1) : CAREERWILL APP) My Students Are God's Gift To MeDocument19 paginiPronoun (Basic) (Part-1) : CAREERWILL APP) My Students Are God's Gift To MeGod Frist50% (2)
- The Great Gatsby - NotesDocument7 paginiThe Great Gatsby - NotesMegan Mulder100% (2)
- Draft Re Oracle TechnicalDocument3 paginiDraft Re Oracle TechnicalMohammed Rizk IbrahimÎncă nu există evaluări
- Body Language VocabularyDocument2 paginiBody Language VocabularyMaestra inglés0% (1)
- Virtual Private DatabasesDocument7 paginiVirtual Private DatabasesJawad AhmedÎncă nu există evaluări
- Cordillera Career Development College Junior High SchoolDocument3 paginiCordillera Career Development College Junior High SchoolI PunisherÎncă nu există evaluări
- Assembly Language Programming For Reverse Engineering Paul ChinDocument3 paginiAssembly Language Programming For Reverse Engineering Paul ChinCarlos EduardoÎncă nu există evaluări
- 8B Where Did You Go?: Lines To Make Four Cards. Make One Copy of Worksheet 2 For Every LearnerDocument3 pagini8B Where Did You Go?: Lines To Make Four Cards. Make One Copy of Worksheet 2 For Every Learnerestefi zamoraÎncă nu există evaluări
- 21 Century Literature From The Philippines and The World Quarter 1 Philippine Literary HistoryDocument10 pagini21 Century Literature From The Philippines and The World Quarter 1 Philippine Literary HistoryEmelyn AbillarÎncă nu există evaluări
- About PronounsDocument2 paginiAbout PronounsLawrence OrqueroÎncă nu există evaluări
- Words and SentencesDocument163 paginiWords and SentencesEduardo CastellanosÎncă nu există evaluări
- BhhhhyiijkkjgDocument31 paginiBhhhhyiijkkjgAnonymous ax8ufBDÎncă nu există evaluări
- ETECH Module 5 Weeks 6 7Document20 paginiETECH Module 5 Weeks 6 7Hersley PhynomeÎncă nu există evaluări
- Normalization in DBMSDocument9 paginiNormalization in DBMSAnonymous DFpzhrRÎncă nu există evaluări
- KelHay 2008 ENGL533 UnitCurr Week1Day4 GrammarTODDocument1 paginăKelHay 2008 ENGL533 UnitCurr Week1Day4 GrammarTODkellyhayes16Încă nu există evaluări
- SSR Directions s1Document2 paginiSSR Directions s1api-327965506Încă nu există evaluări