S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- CLBottasso ACroce RNicastro LRiviello BSavini 2008Document14 paginiCLBottasso ACroce RNicastro LRiviello BSavini 2008AlexandreSidantÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- La Kabylie Et Les Coutumes Kabyles 1/3, Par Hanoteau Et Letourneux, 1893Document607 paginiLa Kabylie Et Les Coutumes Kabyles 1/3, Par Hanoteau Et Letourneux, 1893Tamkaṛḍit - la Bibliothèque amazighe (berbère) internationale100% (3)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Advances in Geophysics Volume 2, Volume 2 1955Document297 paginiAdvances in Geophysics Volume 2, Volume 2 1955AlexandreSidantÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- La Kabylie Et Les Coutumes Kabyles 1/3, Par Hanoteau Et Letourneux, 1893Document607 paginiLa Kabylie Et Les Coutumes Kabyles 1/3, Par Hanoteau Et Letourneux, 1893Tamkaṛḍit - la Bibliothèque amazighe (berbère) internationale100% (3)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Short Course On Wind Energy - Introduction To Wind Turbine AerodynamicsDocument23 paginiShort Course On Wind Energy - Introduction To Wind Turbine AerodynamicsAlexandreSidantÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- 2 WindTurbineModelingDocument147 pagini2 WindTurbineModelingAlexandreSidantÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Wind Energy: Some Basic Facts: Politecnico Di MilanoDocument30 paginiWind Energy: Some Basic Facts: Politecnico Di MilanoAlexandreSidantÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Schroeder Umi Umd 3015Document150 paginiSchroeder Umi Umd 3015AlexandreSidantÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Report - Wind Turbine Rotor OptimizationDocument27 paginiReport - Wind Turbine Rotor OptimizationZaeem KhanÎncă nu există evaluări
- 6 ScaleEffectsDocument20 pagini6 ScaleEffectsKaio Dos Santos SilvaÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Short Course On Wind Energy - Multidisciplinary Design of Wind Turbine BladesDocument60 paginiShort Course On Wind Energy - Multidisciplinary Design of Wind Turbine BladesAlexandreSidantÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- 3 WindTurbineAeroelasticityDocument158 pagini3 WindTurbineAeroelasticityAlexandreSidantÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Schroeder Umi Umd 3015Document150 paginiSchroeder Umi Umd 3015AlexandreSidantÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Nasa TM 101029 19890004067 1989004067Document70 paginiNasa TM 101029 19890004067 1989004067AlexandreSidantÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Young AHS Design2000Document23 paginiYoung AHS Design2000AlexandreSidantÎncă nu există evaluări
- PoundsDocument8 paginiPoundsmilo129Încă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Graves - Problems of Man Powered Rotorcraft 1962Document6 paginiGraves - Problems of Man Powered Rotorcraft 1962AlexandreSidantÎncă nu există evaluări
- 6th Central Pay Commission Salary CalculatorDocument15 pagini6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- CLBottasso SCacciola ACroce SGupta EWEC2010Document19 paginiCLBottasso SCacciola ACroce SGupta EWEC2010AlexandreSidantÎncă nu există evaluări
- EZanenga DLeonello CLBottasso 2008Document10 paginiEZanenga DLeonello CLBottasso 2008AlexandreSidantÎncă nu există evaluări
- HPH FINAL Report Matthew and John 1Document50 paginiHPH FINAL Report Matthew and John 1AlexandreSidantÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Da Vinci PaperDocument6 paginiDa Vinci PaperKuldeep AgrawalÎncă nu există evaluări
- Eth 8596 02Document205 paginiEth 8596 02AlexandreSidantÎncă nu există evaluări
- Eth 8537 01Document8 paginiEth 8537 01AlexandreSidantÎncă nu există evaluări
- Wind Energy: Some Basic Facts: Politecnico Di MilanoDocument30 paginiWind Energy: Some Basic Facts: Politecnico Di MilanoAlexandreSidantÎncă nu există evaluări
- A 008995Document298 paginiA 008995AlexandreSidantÎncă nu există evaluări
- Eth 25156 01Document2 paginiEth 25156 01AlexandreSidantÎncă nu există evaluări
- Eth 25054 02Document147 paginiEth 25054 02AlexandreSidantÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Eth 8447 01Document40 paginiEth 8447 01AlexandreSidantÎncă nu există evaluări
- Operation Research Thesis PDFDocument7 paginiOperation Research Thesis PDFsmgcjvwhd100% (2)
- VP - ScrewPress Optimization - 21 - BDI - VP1464 - enDocument28 paginiVP - ScrewPress Optimization - 21 - BDI - VP1464 - enCaio NunesÎncă nu există evaluări
- Tut 9 SolnDocument10 paginiTut 9 SolnMD. Rakib HosenÎncă nu există evaluări
- Literature Review of Newspaper IndustryDocument10 paginiLiterature Review of Newspaper IndustryVikram Pratap SinghÎncă nu există evaluări
- CplexDocument49 paginiCplexAbhishek PuriÎncă nu există evaluări
- Operation Research Lecture NotesDocument119 paginiOperation Research Lecture NotesCerebro King100% (1)
- Handbook of Mathematical Economics Vol 1Document380 paginiHandbook of Mathematical Economics Vol 1Leticia KlotzÎncă nu există evaluări
- Advanced U Macro SlidesDocument439 paginiAdvanced U Macro SlidesJohn Harry MarcoÎncă nu există evaluări
- SUS H101 Aspen HYSYS CCS ACU Study GuideDocument3 paginiSUS H101 Aspen HYSYS CCS ACU Study GuideOttors kebin philipÎncă nu există evaluări
- Extended State Estimator Based Two Area Load Frequency ControlDocument7 paginiExtended State Estimator Based Two Area Load Frequency ControlParamjit SahaÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Design of A Counterbalance Forklift Based On A Predictive Anti-Tip-Over ControllerDocument16 paginiDesign of A Counterbalance Forklift Based On A Predictive Anti-Tip-Over ControllerHo Van RoiÎncă nu există evaluări
- A Review On Optimization of Fuzzy ControllerDocument11 paginiA Review On Optimization of Fuzzy ControllerPham ThuanÎncă nu există evaluări
- PMF 5.0 User GuideDocument136 paginiPMF 5.0 User GuideDana HowellÎncă nu există evaluări
- Agc From EtapDocument8 paginiAgc From EtapKiran KarthikÎncă nu există evaluări
- Autonomous Flight in Unstructured and Unknown Indoor EnvironmentsDocument8 paginiAutonomous Flight in Unstructured and Unknown Indoor EnvironmentsJames KnotÎncă nu există evaluări
- Irrigation Planning and Management Through Optimization ModellingDocument14 paginiIrrigation Planning and Management Through Optimization ModellingChrome TsauryÎncă nu există evaluări
- Quantitative Analysis For Management Ch07Document98 paginiQuantitative Analysis For Management Ch07Qonita NazhifaÎncă nu există evaluări
- Krajewski TIF Supplement EDocument25 paginiKrajewski TIF Supplement Ejabbott99Încă nu există evaluări
- Assesment of NTDC Planning & Protections System Software Tools 15-02-2022Document18 paginiAssesment of NTDC Planning & Protections System Software Tools 15-02-2022sami ul haqÎncă nu există evaluări
- +3 Cbcs Syllabus: Economics HonoursDocument70 pagini+3 Cbcs Syllabus: Economics HonoursAbhinash PattanayakÎncă nu există evaluări
- Optimal Placement and Sizing of Wind Farm in Vietnamese Power System Based On Particle Swarm OptimizationDocument6 paginiOptimal Placement and Sizing of Wind Farm in Vietnamese Power System Based On Particle Swarm Optimizationnam321985Încă nu există evaluări
- Optimization of Rasasm and Sambar Powder Ingredients Using Linear Programming TechniquesDocument1 paginăOptimization of Rasasm and Sambar Powder Ingredients Using Linear Programming TechniquesGulshan KumarÎncă nu există evaluări
- Optimazation ProblemsDocument17 paginiOptimazation ProblemsRichard Lorenzo BeloÎncă nu există evaluări
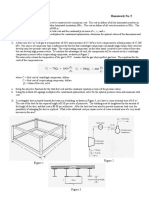
- HW 5Document6 paginiHW 5Snigdha YadavÎncă nu există evaluări
- In An Exam, Students in A Class Scored As Follows: S (45, 67, 95, 89, 88, 40, 90, 88, 56, 78, 88, 76) What Is The Mode For The Data Shown Above?Document10 paginiIn An Exam, Students in A Class Scored As Follows: S (45, 67, 95, 89, 88, 40, 90, 88, 56, 78, 88, 76) What Is The Mode For The Data Shown Above?Miguel Angelo GarciaÎncă nu există evaluări
- Transportation ModelDocument17 paginiTransportation ModelSimantoPreeomÎncă nu există evaluări
- Levenberg-Marquardt Algorithms Vs Trust Region Algorithms: Frank Vanden BerghenDocument4 paginiLevenberg-Marquardt Algorithms Vs Trust Region Algorithms: Frank Vanden Berghenseyed mohammadÎncă nu există evaluări
- George B DantzigDocument19 paginiGeorge B DantzigKeith BoltonÎncă nu există evaluări
- Heuristics in Decision MakingDocument8 paginiHeuristics in Decision MakingiuibuibÎncă nu există evaluări
- Advantages of Linear ProgrammingDocument6 paginiAdvantages of Linear ProgrammingArun RanaÎncă nu există evaluări
- Carpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresDe la EverandCarpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresEvaluare: 1 din 5 stele1/5 (2)
- To Engineer Is Human: The Role of Failure in Successful DesignDe la EverandTo Engineer Is Human: The Role of Failure in Successful DesignEvaluare: 4 din 5 stele4/5 (138)
- Marine Structural Design CalculationsDe la EverandMarine Structural Design CalculationsEvaluare: 4.5 din 5 stele4.5/5 (13)
- Predicting Lifetime for Concrete StructureDe la EverandPredicting Lifetime for Concrete StructureÎncă nu există evaluări
- Advanced Modelling Techniques in Structural DesignDe la EverandAdvanced Modelling Techniques in Structural DesignEvaluare: 5 din 5 stele5/5 (3)