S-ar putea să vă placă și
- Tipe PDFDocument9 paginiTipe PDFhhdgfhÎncă nu există evaluări
- THESIS EPFL PHD HYDRODYNAMICS OF PUMP-TURBINE OPERATING AT OFF-DESIGN CONDITIONS IN GENERATING MODE 2012 PDFDocument188 paginiTHESIS EPFL PHD HYDRODYNAMICS OF PUMP-TURBINE OPERATING AT OFF-DESIGN CONDITIONS IN GENERATING MODE 2012 PDFAlexis MUHIRWAÎncă nu există evaluări
- Conduites - Forcées Principe, Aménagement Et SécuritéDocument19 paginiConduites - Forcées Principe, Aménagement Et SécuritéIMARÎncă nu există evaluări
- EM DI DF 140717 1 A FonctionnementGroupes FR deDocument22 paginiEM DI DF 140717 1 A FonctionnementGroupes FR deBar AvaitÎncă nu există evaluări
- Investigations of Time Dependent Flow Phenomena in A Turbine and A Pump-Turbine of Francis Type: Rotor-Stator Interactions and Precessing Vortex RopeDocument154 paginiInvestigations of Time Dependent Flow Phenomena in A Turbine and A Pump-Turbine of Francis Type: Rotor-Stator Interactions and Precessing Vortex RopeAlexis MUHIRWAÎncă nu există evaluări
- Projet Binational Peligre Dos BocasDocument94 paginiProjet Binational Peligre Dos BocasFrancis MitchellÎncă nu există evaluări
- Conduites ForceesDocument18 paginiConduites ForceesIMARÎncă nu există evaluări
- Francis HandbookDocument151 paginiFrancis HandbookSawsen CheboukiÎncă nu există evaluări
- Din 19704-76Document28 paginiDin 19704-76Farid Hydro100% (1)
- Appendix F1 - Wimes 1.02 Submersible Pump UnitDocument50 paginiAppendix F1 - Wimes 1.02 Submersible Pump Uniter_sanjaypatelÎncă nu există evaluări
- Iec-60034-14 Ed3.1Document9 paginiIec-60034-14 Ed3.1Victor Castellanos Alegria0% (1)
- Iec 60072-2Document33 paginiIec 60072-2Suterm SeccionÎncă nu există evaluări
- LeRoi Sizing ChartDocument1 paginăLeRoi Sizing ChartRyan PatraÎncă nu există evaluări
- Histoire BarragesDocument51 paginiHistoire BarragesSylvainTotalÎncă nu există evaluări
- These DPetrichenko VF PDFDocument175 paginiThese DPetrichenko VF PDFKiranÎncă nu există evaluări
- Conduite Forcée LEEIDocument17 paginiConduite Forcée LEEIAMIAMIÎncă nu există evaluări
- IEC 60953-1-1990 ScanDocument168 paginiIEC 60953-1-1990 ScanMuhammad Dzaky FarhanÎncă nu există evaluări
- IEC Standard Publication 60072-1 PDFDocument13 paginiIEC Standard Publication 60072-1 PDFrayme MestreÎncă nu există evaluări
- Article 202Document5 paginiArticle 202Demba KeitaÎncă nu există evaluări
- ModélisationDocument6 paginiModélisationpiteteÎncă nu există evaluări
- CH03 Integration Des Systemes Éioliens 2024Document22 paginiCH03 Integration Des Systemes Éioliens 2024energiesrenouvelables25Încă nu există evaluări
- Station de Pompage RelaisDocument14 paginiStation de Pompage RelaisjamelÎncă nu există evaluări
- Art8-1 2Document8 paginiArt8-1 2rababsouiahÎncă nu există evaluări
- Articlemeflah 1Document12 paginiArticlemeflah 1Amine AghbariÎncă nu există evaluări
- Art17-3 15 PDFDocument12 paginiArt17-3 15 PDFhassen baccarÎncă nu există evaluări
- Chapitre I 22Document17 paginiChapitre I 22Alpha DialloÎncă nu există evaluări
- Analyse Énergétique Des Centrales Électriques: Filière Ingénieur Électronique, Électrotechnique Et AutomatiqueDocument43 paginiAnalyse Énergétique Des Centrales Électriques: Filière Ingénieur Électronique, Électrotechnique Et Automatiquehiha2010Încă nu există evaluări
- Energie EolienneDocument22 paginiEnergie Eoliennenboulegroune0% (1)
- Expose Mte Groupe 16Document42 paginiExpose Mte Groupe 16Gaël KabÎncă nu există evaluări
- Reseaux Electriques-ExtraitDocument26 paginiReseaux Electriques-ExtraitJamal Mahmoud100% (1)
- Methodologie de La Recherche PDFDocument6 paginiMethodologie de La Recherche PDFAmadouMalickMouamfonMoumbagnaÎncă nu există evaluări
- Clement 2019 CFM Generatrice VcorrigeeDocument9 paginiClement 2019 CFM Generatrice VcorrigeeMBOCK NYOBEÎncă nu există evaluări
- Cours de Pompage SolaireDocument44 paginiCours de Pompage SolaireMaroc EcoloadÎncă nu există evaluări
- TD Turbine Mayenne - Generatrice SynchroneDocument4 paginiTD Turbine Mayenne - Generatrice Synchronefarid.hamraniÎncă nu există evaluări
- Chap01 - Support de Cours - Mesures&InstallationsElect - 2021-2022Document21 paginiChap01 - Support de Cours - Mesures&InstallationsElect - 2021-2022ChahoubÎncă nu există evaluări
- Electrotechnique PDFDocument1.238 paginiElectrotechnique PDFkanbouch89% (9)
- MicroCentrale HydrauliqueDocument9 paginiMicroCentrale HydrauliqueDhikrane NafaaÎncă nu există evaluări
- Technologies Des Systemes de Stockage de Lenergie Electrique EnspsDocument21 paginiTechnologies Des Systemes de Stockage de Lenergie Electrique Enspsaidoudi walidÎncă nu există evaluări
- CorreTD 3Document9 paginiCorreTD 3Salma RyaniÎncă nu există evaluări
- TD Roduction Hydroelectrique - Eleve - v2Document2 paginiTD Roduction Hydroelectrique - Eleve - v2Tsito RTnÎncă nu există evaluări
- Analsye Des Réseaux Électriques 3Document17 paginiAnalsye Des Réseaux Électriques 3NelrisÎncă nu există evaluări
- Etude de La Machine Asynchrone A Cage D'ecureuilDocument7 paginiEtude de La Machine Asynchrone A Cage D'ecureuilJunior DzoulucienÎncă nu există evaluări
- FlittiDocument6 paginiFlittiBad BoyÎncă nu există evaluări
- Dimensionnement de Systèmes de Pompage PhotovoltaïqueDocument8 paginiDimensionnement de Systèmes de Pompage Photovoltaïquesalhi hassanÎncă nu există evaluări
- Optimisation Par Les Algorithmes Genetiq PDFDocument5 paginiOptimisation Par Les Algorithmes Genetiq PDFDjakaria DoumboÎncă nu există evaluări
- CHAP2 - Generation de L'energie Electrique PDFDocument10 paginiCHAP2 - Generation de L'energie Electrique PDFHamid BendjelloulÎncă nu există evaluări
- Pompage de LeauDocument6 paginiPompage de LeaujdongmofabiolaÎncă nu există evaluări
- Guide Des Travaux Pratiques en HydroelectriciteDocument29 paginiGuide Des Travaux Pratiques en HydroelectriciteÉnoch Kazimoto JuniorÎncă nu există evaluări
- Flow-Induced Vibration of Nuclear Power Station ComponentsDocument66 paginiFlow-Induced Vibration of Nuclear Power Station Componentsரா. ராஜ பாண்டிÎncă nu există evaluări
- Projet Sur OnduleurDocument60 paginiProjet Sur Onduleurtanweer100% (1)
- CMF13Document7 paginiCMF13Azeddine BoughmarÎncă nu există evaluări
- Developpement Dune Machine Asynchrone Double Alimentation de Rapport 1 Presentation Des Travaux Et Discussions Autour de Cette Architecture.Document2 paginiDeveloppement Dune Machine Asynchrone Double Alimentation de Rapport 1 Presentation Des Travaux Et Discussions Autour de Cette Architecture.adrarwalidÎncă nu există evaluări
- TP 01 Energie ÉolienneDocument6 paginiTP 01 Energie ÉoliennehmakÎncă nu există evaluări
- Energie HydrauliqueDocument9 paginiEnergie Hydrauliquemohamedmessahel754Încă nu există evaluări
- Statisme Pour Les Générateurs HydroélectriquesDocument16 paginiStatisme Pour Les Générateurs HydroélectriquesOualid LamraouiÎncă nu există evaluări
- Présentation Des Matériels Et Équipements de Microcentrales HydroélectriquesDocument37 paginiPrésentation Des Matériels Et Équipements de Microcentrales Hydroélectriqueshamdi rouaÎncă nu există evaluări
- TP Dim Syst Roua RejebDocument17 paginiTP Dim Syst Roua RejebMontasar MbarkiÎncă nu există evaluări
- 2ie PV Controle-2009-2010Document3 pagini2ie PV Controle-2009-2010Hamed SOARA33% (3)
- Simulateur Éolien Sous Psim Article Revue 3EIDocument7 paginiSimulateur Éolien Sous Psim Article Revue 3EIjmroussel100% (1)
- S HADDAD Jijel - UnivDocument6 paginiS HADDAD Jijel - UnivTarek BouallegÎncă nu există evaluări
- Les Étapes de Formation Des Roches SédimentaireDocument2 paginiLes Étapes de Formation Des Roches Sédimentairehamada2002Încă nu există evaluări
- Exercice D'application Optique VDocument1 paginăExercice D'application Optique VARDALAn MohamedÎncă nu există evaluări
- Correction DevoirDeSyntheseN3 1AS 2009 FinDocument8 paginiCorrection DevoirDeSyntheseN3 1AS 2009 FinMehdi Ben Arif67% (3)
- Analyse D'une Situation de Communication en TaDocument2 paginiAnalyse D'une Situation de Communication en Taroger martin bassong batiigÎncă nu există evaluări
- Cahier D Exercices Ile Aux Mots 8hDocument88 paginiCahier D Exercices Ile Aux Mots 8hCizÎncă nu există evaluări
- The Cuban Missile CrisisDocument8 paginiThe Cuban Missile Crisismilan.bodis523Încă nu există evaluări
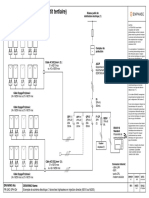
- 3 Branches Triphasées en Injection Directe M215 Ou M250Document1 pagină3 Branches Triphasées en Injection Directe M215 Ou M250MbgardÎncă nu există evaluări
- PV Liste-De-Prix Onduleurs HUAWEI 11-2023 FRDocument2 paginiPV Liste-De-Prix Onduleurs HUAWEI 11-2023 FRkoumbounisdimÎncă nu există evaluări
- TP2Document4 paginiTP2Youssef Don RajawiÎncă nu există evaluări
- Observatoire National de La Filiere Riz Du Burkina Faso (Onriz)Document6 paginiObservatoire National de La Filiere Riz Du Burkina Faso (Onriz)toni_yousf2418Încă nu există evaluări
- RSE & EthiqueDocument6 paginiRSE & Ethiquealemor2369Încă nu există evaluări
- Depliant ELM MasterDocument3 paginiDepliant ELM MasterYazid AbouchihabeddineÎncă nu există evaluări
- Calendrier Des Examens Semestre Impair Janvier 2022 AlphaDocument28 paginiCalendrier Des Examens Semestre Impair Janvier 2022 AlphaMeg JustMegÎncă nu există evaluări
- Arval - Cofrastra 40Document16 paginiArval - Cofrastra 40helder.fradeÎncă nu există evaluări
- TFE Gustave KISHATU MWAMBA Version Finale-1Document112 paginiTFE Gustave KISHATU MWAMBA Version Finale-1gustave kishatu100% (2)
- Process AciérieDocument6 paginiProcess Aciériesanae jaouiÎncă nu există evaluări
- Af Sen GaeDocument42 paginiAf Sen GaeعبداللهبنزنوÎncă nu există evaluări
- Canalisations de Gaz NaturelDocument120 paginiCanalisations de Gaz NaturelJean-David DelordÎncă nu există evaluări
- Mesure de Compression Moteur Vers FinaleDocument46 paginiMesure de Compression Moteur Vers FinaleRaouf HarzallahÎncă nu există evaluări
- Chapitre 1 LES OUTILS MATHEMATIQUESDocument9 paginiChapitre 1 LES OUTILS MATHEMATIQUESa.ddÎncă nu există evaluări
- AnnexeDocument168 paginiAnnexeMoez AliÎncă nu există evaluări
- 2nd - Exercices Corrigés - Variations D'une FonctDocument1 pagină2nd - Exercices Corrigés - Variations D'une Fonctalyahmed610Încă nu există evaluări
- ExcisionDocument54 paginiExcisionAbdou Razak OuédraogoÎncă nu există evaluări
- Memoire Inj Messaoud BENZOUAIDocument168 paginiMemoire Inj Messaoud BENZOUAIManong ShegueyÎncă nu există evaluări
- Tube VentouriDocument10 paginiTube VentouriMohammed BoulbairÎncă nu există evaluări
- 3 Partie Caractéristiques Des LubrifiantDocument32 pagini3 Partie Caractéristiques Des Lubrifiantsamir belamriÎncă nu există evaluări
- Introduction À La RobotiqueDocument19 paginiIntroduction À La RobotiqueRazzougui SarahÎncă nu există evaluări
- Racines Carrees BaseDocument8 paginiRacines Carrees Basejulien9562Încă nu există evaluări
- Prise en Main de Microsoft Office Excel 2016Document713 paginiPrise en Main de Microsoft Office Excel 2016max80% (5)
- Exposé MDE Et Énergie RenouvelablesDocument12 paginiExposé MDE Et Énergie Renouvelablesromain fokamÎncă nu există evaluări