S-ar putea să vă placă și
- Project Report On Obstacle Avoiding RobotDocument13 paginiProject Report On Obstacle Avoiding Robotarunraj SuresÎncă nu există evaluări
- ElectronicsDocument18 paginiElectronicsSrinjay BhattacharyaÎncă nu există evaluări
- 3719 DatasheetDocument6 pagini3719 DatasheetAnkit Gupta100% (2)
- Ultrasonic Car ParkingDocument7 paginiUltrasonic Car Parkingxpeprishey100% (3)
- Sound Activated Intercom DocuDocument15 paginiSound Activated Intercom DocuGanimid AlvarezÎncă nu există evaluări
- Four Way Tracking Car TutorialDocument26 paginiFour Way Tracking Car Tutorialvadym_kovalenko4166Încă nu există evaluări
- Obstacle Detection and Avoidance RobotDocument19 paginiObstacle Detection and Avoidance Robotsasankakatreddi0% (1)
- Up-9000 ManualDocument33 paginiUp-9000 ManualSunday PeterÎncă nu există evaluări
- Documentation of Shadow AlarmDocument34 paginiDocumentation of Shadow AlarmZaara Sayyad0% (1)
- Assignment Benc2423Document15 paginiAssignment Benc2423Arfan AzmanÎncă nu există evaluări
- Mime Attachment PDFDocument18 paginiMime Attachment PDFdiyÎncă nu există evaluări
- Shadow AlarmDocument36 paginiShadow Alarmanuvaishnavi60% (5)
- Ultrasonic Based Distance MeasurementDocument71 paginiUltrasonic Based Distance MeasurementDeepkar Reddy100% (4)
- Development of Smart Blind StickDocument7 paginiDevelopment of Smart Blind StickxpeprisheyÎncă nu există evaluări
- Literature Review BasicDocument7 paginiLiterature Review BasicZebPolka100% (1)
- Vehicle Speed Control Using R.F. Technology: 1 Project Report OnDocument57 paginiVehicle Speed Control Using R.F. Technology: 1 Project Report OnAvinash RanjanÎncă nu există evaluări
- Ultrasonic Rangefinder Using 8051Document25 paginiUltrasonic Rangefinder Using 8051Kaos Polos Nakira50% (4)
- Differential Transformer ProtectionDocument14 paginiDifferential Transformer ProtectionChetanModiÎncă nu există evaluări
- Final SDocument8 paginiFinal SChetanModiÎncă nu există evaluări
- Report 151220202107Document11 paginiReport 151220202107barisozksmn06Încă nu există evaluări
- Automatic Water Level Controller Using Arduino UNO.Document21 paginiAutomatic Water Level Controller Using Arduino UNO.Harsh ChoudharyÎncă nu există evaluări
- Kenwood KRF A 4030Document20 paginiKenwood KRF A 4030Iordan AdrianÎncă nu există evaluări
- RF Based Home-AutomationDocument58 paginiRF Based Home-AutomationRahul SainiÎncă nu există evaluări
- Talking Volt MeterDocument9 paginiTalking Volt Meterudita10Încă nu există evaluări
- Vehicle Anti Collision Using Ultrasonic SignalsDocument22 paginiVehicle Anti Collision Using Ultrasonic SignalsAakash GuptaÎncă nu există evaluări
- Device For Helping The BlindDocument9 paginiDevice For Helping The BlindBiancaÎncă nu există evaluări
- Overcurrent Protection System Using MicrocontrollerDocument14 paginiOvercurrent Protection System Using MicrocontrollerSritam Kumar deyÎncă nu există evaluări
- PDD ProjectDocument30 paginiPDD ProjectIsrarul HaqueÎncă nu există evaluări
- Extech 407750 ManualDocument8 paginiExtech 407750 ManualTuấn LêÎncă nu există evaluări
- He XR2206 Function Generator DIY Kit & Other GoodiesDocument8 paginiHe XR2206 Function Generator DIY Kit & Other Goodiesluis cortelezziÎncă nu există evaluări
- 8. HZJB-I 3 Phase Relay Protection Tester -User Manual - 新款黑色面板Document125 pagini8. HZJB-I 3 Phase Relay Protection Tester -User Manual - 新款黑色面板Mạnh Nguyễn VănÎncă nu există evaluări
- St6911 Ipt™ Acceleration Vibration Transducer St6917 Ipt™ Velocity Vibration TransducerDocument8 paginiSt6911 Ipt™ Acceleration Vibration Transducer St6917 Ipt™ Velocity Vibration TransducerProcurement PardisanÎncă nu există evaluări
- Final Year Project ReportDocument14 paginiFinal Year Project ReportARPAN GHOSHÎncă nu există evaluări
- Ultrasonic Motion DetectorDocument9 paginiUltrasonic Motion DetectorMarium AliÎncă nu există evaluări
- SensorDocument21 paginiSensorLory Marc100% (2)
- EEE 3210 Final Project ReportDocument19 paginiEEE 3210 Final Project ReportDerrick ThamÎncă nu există evaluări
- 4 Channel DJ Audio Mixer Circuit Part 2 1Document12 pagini4 Channel DJ Audio Mixer Circuit Part 2 1george1Încă nu există evaluări
- Fire Fighting Robot: Presented byDocument19 paginiFire Fighting Robot: Presented byAws Faeq100% (1)
- Project Report On "Contactless Tachometer - Using HALL EFFECT Sensor" Minor Project ReportDocument26 paginiProject Report On "Contactless Tachometer - Using HALL EFFECT Sensor" Minor Project ReportSatyam JainÎncă nu există evaluări
- IR TachometerDocument10 paginiIR TachometerMohammed Abdulrahman MossaÎncă nu există evaluări
- Bitirme RaporuDocument26 paginiBitirme RaporuZeynal Abidin ŞabaşÎncă nu există evaluări
- Review 1 (Phase II) - Batch-02 ModifiedDocument27 paginiReview 1 (Phase II) - Batch-02 ModifiedVi LÎncă nu există evaluări
- LABORATORY 5. Automations Using Ultrasonic Snesor and DC MotorDocument7 paginiLABORATORY 5. Automations Using Ultrasonic Snesor and DC MotorPatrick Vallon100% (2)
- Review 1 (Phase II) - Batch-02 ModifiedDocument27 paginiReview 1 (Phase II) - Batch-02 ModifiedVi LÎncă nu există evaluări
- Robo Presentation ArduinoDocument16 paginiRobo Presentation ArduinoAhmed RazaÎncă nu există evaluări
- SDDocument19 paginiSDnavedahmad0249Încă nu există evaluări
- Internet of Things and MM Jury PDFDocument20 paginiInternet of Things and MM Jury PDFGagan SinghviÎncă nu există evaluări
- Daewoo 14Q1Document77 paginiDaewoo 14Q1Marius-Ion Asandei100% (1)
- Project Report JointDocument26 paginiProject Report JointKamal AshrafÎncă nu există evaluări
- Photovore RobotDocument32 paginiPhotovore RobotKhadarÎncă nu există evaluări
- A Solar Powered Smart Helmet With MultifeaturesDocument6 paginiA Solar Powered Smart Helmet With MultifeaturesInternational Journal of Engineering Inventions (IJEI)Încă nu există evaluări
- Joe Project RobotDocument19 paginiJoe Project RobotTiruveedula RishendraÎncă nu există evaluări
- Noise Canceling Headphones: Team Members Doan Thanh Khiet Tran Jasmine Khadem Kalina GuentchevaDocument17 paginiNoise Canceling Headphones: Team Members Doan Thanh Khiet Tran Jasmine Khadem Kalina GuentchevaJadSaidÎncă nu există evaluări
- FinalDocument17 paginiFinalHuxtle RahulÎncă nu există evaluări
- Ultrasonic Range SensorDocument8 paginiUltrasonic Range SensorAntonnio Savio LeiteÎncă nu există evaluări
- DIY Preamplifier For Smartphone OscilloscopesDocument5 paginiDIY Preamplifier For Smartphone Oscilloscopespredrag152Încă nu există evaluări
- 1/4 Din Microbased Controller Operators Manual: FORM 3665 Edition 1 © OCT. 1995 PRICE $10.00Document71 pagini1/4 Din Microbased Controller Operators Manual: FORM 3665 Edition 1 © OCT. 1995 PRICE $10.00kmpoulos100% (1)
- Project Report On Dam Safety SystemDocument53 paginiProject Report On Dam Safety SystemAbin JosephÎncă nu există evaluări
- Notas TelurometroDocument61 paginiNotas TelurometrocristianÎncă nu există evaluări
- 3fl12810abaawbzza - 02 Alu Node B DescriptionDocument146 pagini3fl12810abaawbzza - 02 Alu Node B DescriptionAmit PardhiÎncă nu există evaluări
- How To Use Mapinfo To Create Thematic Map To Analyze DT Result by TEMSDocument7 paginiHow To Use Mapinfo To Create Thematic Map To Analyze DT Result by TEMSMuhammad Nura AbubakarÎncă nu există evaluări
- WDT Installation Use Guide For Subcon For KTK V1.0 3092015Document37 paginiWDT Installation Use Guide For Subcon For KTK V1.0 3092015Shah Fahad75% (4)
- iCIRET 2013: 03 January 2013 - Thursday - Day IDocument42 paginiiCIRET 2013: 03 January 2013 - Thursday - Day Inssakthivel1Încă nu există evaluări
- Dayo ReportDocument29 paginiDayo ReportdavidgrcaemichaelÎncă nu există evaluări
- Manual HI Software (C5.2.x STD) 1.2Document138 paginiManual HI Software (C5.2.x STD) 1.2Valentin D Jesus100% (1)
- Manual DICOMDocument74 paginiManual DICOMsabistonÎncă nu există evaluări
- M750 SMDocument678 paginiM750 SMkostas_sanÎncă nu există evaluări
- HN ATC Notes Module 1 Part1Document10 paginiHN ATC Notes Module 1 Part1Rajath AnÎncă nu există evaluări
- Oracle® Retail Xstore Point of Service: User GuideDocument1.189 paginiOracle® Retail Xstore Point of Service: User Guidefederica.migliore.legamiÎncă nu există evaluări
- MANUAL Ae31 A0 EngDocument56 paginiMANUAL Ae31 A0 EngeduinnÎncă nu există evaluări
- User Scheduling of 5G Network Using MCR - Non Orthonganal Multiple AccessDocument14 paginiUser Scheduling of 5G Network Using MCR - Non Orthonganal Multiple AccessPriya padhuÎncă nu există evaluări
- RWS 5 Q3Document1 paginăRWS 5 Q3Eunice Kyla MapisaÎncă nu există evaluări
- Jahan University BCS Faculty: Subject: Database System Lecture# LecturerDocument18 paginiJahan University BCS Faculty: Subject: Database System Lecture# LecturerBaktash AhmadiÎncă nu există evaluări
- Unit 4 - CSDocument32 paginiUnit 4 - CSyuydokostaÎncă nu există evaluări
- Shannon-Fano Coding: September 18, 2017Document2 paginiShannon-Fano Coding: September 18, 2017prashant kulkarniÎncă nu există evaluări
- OptiX PTN 900 Products BrochureDocument5 paginiOptiX PTN 900 Products BrochureMirza Ghulam SarwarÎncă nu există evaluări
- Lesson 3 - Network TopologyDocument21 paginiLesson 3 - Network TopologyRebel ChinnaÎncă nu există evaluări
- CP-UNR-4K4324-I: 32 Ch. 4K Network Video RecorderDocument5 paginiCP-UNR-4K4324-I: 32 Ch. 4K Network Video RecorderRAJENDRAN PLÎncă nu există evaluări
- Operating System Kcs-401. Question Bank À Unit-Iv: Memory ManagementDocument2 paginiOperating System Kcs-401. Question Bank À Unit-Iv: Memory ManagementNishant MishraÎncă nu există evaluări
- Configure Erspan VmwareDocument4 paginiConfigure Erspan Vmwarearmando.poyaoanÎncă nu există evaluări
- AssignmentDocument5 paginiAssignmentqqqÎncă nu există evaluări
- Sophos VPN Clients DSN ADocument4 paginiSophos VPN Clients DSN AOlavo Augusto Dalcorso SilvaÎncă nu există evaluări
- 1-CheckList For Informatica New Project SetupDocument14 pagini1-CheckList For Informatica New Project Setupareddy_bÎncă nu există evaluări
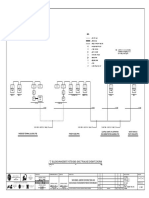
- Building Management System (BMS) Basic Trunkline Schematic Diagram 2Document3 paginiBuilding Management System (BMS) Basic Trunkline Schematic Diagram 2Anonymous NcB95G6XwÎncă nu există evaluări
- Chelli ResumeDocument2 paginiChelli ResumeMurali KrishnaÎncă nu există evaluări
- Data Structure AucseDocument10 paginiData Structure AucseyogeshdxtÎncă nu există evaluări
- Final Year Project SRSDocument25 paginiFinal Year Project SRSNikhil YadavÎncă nu există evaluări
- ACL - Wildcard MasksDocument3 paginiACL - Wildcard MasksAnonymous s7uIdAvj2RÎncă nu există evaluări
- KT 6390 Communication Protocol V1.0 20190919Document4 paginiKT 6390 Communication Protocol V1.0 20190919ernie ramosÎncă nu există evaluări
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsDe la EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsEvaluare: 5 din 5 stele5/5 (3)
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)De la EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Evaluare: 5 din 5 stele5/5 (2)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyDe la EverandChip War: The Quest to Dominate the World's Most Critical TechnologyEvaluare: 4.5 din 5 stele4.5/5 (229)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]De la EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Evaluare: 5 din 5 stele5/5 (3)
- Cyber-Physical Systems: Foundations, Principles and ApplicationsDe la EverandCyber-Physical Systems: Foundations, Principles and ApplicationsHoubing H. SongÎncă nu există evaluări
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102De la EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Evaluare: 5 din 5 stele5/5 (2)
- iPhone 15 Pro User Guide for Beginners and SeniorsDe la EverandiPhone 15 Pro User Guide for Beginners and SeniorsÎncă nu există evaluări
- Chip War: The Fight for the World's Most Critical TechnologyDe la EverandChip War: The Fight for the World's Most Critical TechnologyEvaluare: 4.5 din 5 stele4.5/5 (82)
- Raspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesDe la EverandRaspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesÎncă nu există evaluări
- Computer Science: A Concise IntroductionDe la EverandComputer Science: A Concise IntroductionEvaluare: 4.5 din 5 stele4.5/5 (14)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002De la EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Evaluare: 5 din 5 stele5/5 (1)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XDe la EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XEvaluare: 3 din 5 stele3/5 (2)
- Samsung Galaxy S22 Ultra User Guide For Beginners: The Complete User Manual For Getting Started And Mastering The Galaxy S22 Ultra Android PhoneDe la EverandSamsung Galaxy S22 Ultra User Guide For Beginners: The Complete User Manual For Getting Started And Mastering The Galaxy S22 Ultra Android PhoneÎncă nu există evaluări
- Raspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideDe la EverandRaspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideÎncă nu există evaluări
- Cancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionDe la EverandCancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionEvaluare: 5 din 5 stele5/5 (2)
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxDe la EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxÎncă nu există evaluări
- The comprehensive guide to build Raspberry Pi 5 RoboticsDe la EverandThe comprehensive guide to build Raspberry Pi 5 RoboticsÎncă nu există evaluări
- Mastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFDe la EverandMastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFÎncă nu există evaluări
- The User's Directory of Computer NetworksDe la EverandThe User's Directory of Computer NetworksTracy LaqueyÎncă nu există evaluări
- Raspberry Pi for Python Programmers Cookbook - Second EditionDe la EverandRaspberry Pi for Python Programmers Cookbook - Second EditionÎncă nu există evaluări
- A Beginner's Guide To IPhone 14 Pro Max Mastering: The Comprehensive User Guide And Illustrated Owner's Manual With Tips And Advanced Tricks For New BeDe la EverandA Beginner's Guide To IPhone 14 Pro Max Mastering: The Comprehensive User Guide And Illustrated Owner's Manual With Tips And Advanced Tricks For New BeÎncă nu există evaluări