S-ar putea să vă placă și
- Storage Media and Devices: IGCSE - 0417Document35 paginiStorage Media and Devices: IGCSE - 0417rinaÎncă nu există evaluări
- Revised Bloom's TaxonomyDocument2 paginiRevised Bloom's TaxonomyKishwar MashooqÎncă nu există evaluări
- Hard Disk and Hard Drive Physical StructureDocument10 paginiHard Disk and Hard Drive Physical StructureAnji EmmadiÎncă nu există evaluări
- Forward Planning DocumentDocument8 paginiForward Planning Documentapi-451063947Încă nu există evaluări
- The Art of Filing: Managing Your Documents... and Your TimeDocument5 paginiThe Art of Filing: Managing Your Documents... and Your TimeRaquel GloriosoÎncă nu există evaluări
- WorkBook FinalVersionUpdated PDFDocument43 paginiWorkBook FinalVersionUpdated PDFMesooÎncă nu există evaluări
- Removable Storage DevicesDocument10 paginiRemovable Storage DevicesEtty MarlynÎncă nu există evaluări
- Time Management Course Ctrlwork: 2 Tips 3Document7 paginiTime Management Course Ctrlwork: 2 Tips 3Janice HoeksteenÎncă nu există evaluări
- Module 1 - Basic Internal and External DOS CommandsDocument41 paginiModule 1 - Basic Internal and External DOS CommandsAHMAD OUABED0% (1)
- Designing Your WebsiteDocument17 paginiDesigning Your Websitepmdhlamini6456100% (1)
- Project Planning WorksheetsDocument4 paginiProject Planning WorksheetsPlans Problems DecisionsÎncă nu există evaluări
- Mce Training NotesDocument135 paginiMce Training NotesJay PeterÎncă nu există evaluări
- Training GuideDocument9 paginiTraining GuidestudyhackingÎncă nu există evaluări
- 79-Identify The Different Types of ComputersDocument14 pagini79-Identify The Different Types of ComputersKapinpilan Endaila Silongan CesÎncă nu există evaluări
- Word 2016 Lesson 1 Getting StartedDocument24 paginiWord 2016 Lesson 1 Getting StartedRaymond PunoÎncă nu există evaluări
- Using Outlook 2010 For Email: WorkbookDocument16 paginiUsing Outlook 2010 For Email: WorkbooksmanisklÎncă nu există evaluări
- Computer BasicsDocument26 paginiComputer BasicsSivasakti Marimuthu100% (1)
- Office Productivity Tools 1 NoteDocument4 paginiOffice Productivity Tools 1 Notefalegna213Încă nu există evaluări
- Managing Information for Better DecisionsDocument12 paginiManaging Information for Better DecisionsTosin WilliamsÎncă nu există evaluări
- Assignment 1Document7 paginiAssignment 1D BalendranÎncă nu există evaluări
- Official Microsoft E-Learning Course: 2695ae Computer BasicsDocument89 paginiOfficial Microsoft E-Learning Course: 2695ae Computer BasicsJosh SwiftÎncă nu există evaluări
- Year Year Year Year Comp# Comp# Comp# Comp#Document6 paginiYear Year Year Year Comp# Comp# Comp# Comp#Mark DwyerÎncă nu există evaluări
- Cot 2 - 3r'sDocument66 paginiCot 2 - 3r'sYaj AnilomÎncă nu există evaluări
- Basic Computer Skills Guide for MU StudentsDocument5 paginiBasic Computer Skills Guide for MU StudentsArvin LabradaÎncă nu există evaluări
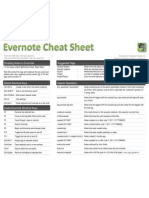
- Essential Evernote keyboard shortcuts and search operatorsDocument1 paginăEssential Evernote keyboard shortcuts and search operatorsRichard KeesÎncă nu există evaluări
- SQIT3043 Chapter 8 - SQL (Latest)Document36 paginiSQIT3043 Chapter 8 - SQL (Latest)Naurah Baiti100% (1)
- Relational DatabasesDocument13 paginiRelational DatabasesasarenkÎncă nu există evaluări
- Basic Computer NetworkDocument30 paginiBasic Computer Networkdipankar_golder99100% (1)
- Unit 4 Word Processing PackageDocument20 paginiUnit 4 Word Processing PackageRahul DodiyaÎncă nu există evaluări
- Course Notes - Unit 1 PDFDocument4 paginiCourse Notes - Unit 1 PDFMichael SkyersÎncă nu există evaluări
- Grade 9 Term Test PapersDocument5 paginiGrade 9 Term Test Papersc5ryek5a100% (1)
- Basic Components of a Computer Hardware SystemDocument5 paginiBasic Components of a Computer Hardware SystemGrace PerezÎncă nu există evaluări
- Part 1 (Estimated Working Time - 30 Mins.)Document3 paginiPart 1 (Estimated Working Time - 30 Mins.)Silviana SuciuÎncă nu există evaluări
- U9L2 Activity+Guide+ +Exploring+One+Column+ +Unit+9+Lesson+2Document2 paginiU9L2 Activity+Guide+ +Exploring+One+Column+ +Unit+9+Lesson+2Rylan RussellÎncă nu există evaluări
- Masterlists 2019Document1.156 paginiMasterlists 2019Jane J NabzÎncă nu există evaluări
- CC Google Sheets PDFDocument7 paginiCC Google Sheets PDFShel Marie100% (1)
- Introduction To WindowsDocument19 paginiIntroduction To WindowsBnay GolayÎncă nu există evaluări
- Unit01 SSADDocument139 paginiUnit01 SSADNawaraj PokhrelÎncă nu există evaluări
- CSEC Information Technology January 2010 P032Document7 paginiCSEC Information Technology January 2010 P032Jhanett RobinsonÎncă nu există evaluări
- Word 2013Document32 paginiWord 2013api-313211190Încă nu există evaluări
- File OrganizationDocument4 paginiFile OrganizationAlicia Haughton100% (1)
- Resolve Database Performance IssuesDocument18 paginiResolve Database Performance Issuesaa wantsÎncă nu există evaluări
- Powerpoint Lesson 4 Expanding On Powerpoint Basics: Microsoft Office 2010 IntroductoryDocument34 paginiPowerpoint Lesson 4 Expanding On Powerpoint Basics: Microsoft Office 2010 IntroductoryMary Joy Morallon Calagui100% (1)
- Answers 1.1 - 5.4Document11 paginiAnswers 1.1 - 5.4Martha Nicole MaristelaÎncă nu există evaluări
- Pathways ls3 2e U03 TestDocument7 paginiPathways ls3 2e U03 TestThảo PhạmÎncă nu există evaluări
- Flipped Lesson PlanDocument3 paginiFlipped Lesson Planapi-384109936Încă nu există evaluări
- Semester PlanningDocument1 paginăSemester PlanningMichelle Zelinski100% (1)
- Pre Ged Rla 31 AugustDocument12 paginiPre Ged Rla 31 Augustapi-686738446Încă nu există evaluări
- Practical Machine Learning On H2O - Home - CourseraDocument3 paginiPractical Machine Learning On H2O - Home - Courseradogra.diwakar8365Încă nu există evaluări
- Lesson 1 - Introduction To System IntegrationDocument27 paginiLesson 1 - Introduction To System Integrationmark daniel beatoÎncă nu există evaluări
- Ubd ExcelDocument3 paginiUbd Excelapi-304709871100% (1)
- Database System Concepts and ArchitectureDocument19 paginiDatabase System Concepts and ArchitectureAbdirisak MohamudÎncă nu există evaluări
- Introduction of Operating Systems - Operating System Tutorial - StudytonightDocument2 paginiIntroduction of Operating Systems - Operating System Tutorial - StudytonightRashidÎncă nu există evaluări
- Difference Between Cache Memory and RegisterDocument2 paginiDifference Between Cache Memory and RegisterKhaled HossainÎncă nu există evaluări
- Procedural Writing ChecklistDocument1 paginăProcedural Writing Checklistapi-315919156Încă nu există evaluări
- Microsoft Tips and TricksDocument95 paginiMicrosoft Tips and TricksTarekHemdanÎncă nu există evaluări
- Databases (Ms Access) NotesDocument11 paginiDatabases (Ms Access) NotesDavid B MwathyÎncă nu există evaluări
- Hardware Function - CpuDocument42 paginiHardware Function - CpumyzalÎncă nu există evaluări
- Summer Assignment 1Document1 paginăSummer Assignment 1Tehreem QamarÎncă nu există evaluări
- DS M6 Ktunotes - inDocument16 paginiDS M6 Ktunotes - inLoo OtÎncă nu există evaluări
- Lecture 06Document7 paginiLecture 06robinthomas176693Încă nu există evaluări
- CS 171 Lecture Outline: April 14, 2010Document2 paginiCS 171 Lecture Outline: April 14, 2010robinthomas176693Încă nu există evaluări
- Encrypted Network File SystemDocument3 paginiEncrypted Network File Systemrobinthomas176693Încă nu există evaluări
- Centralised Time Table: Time Table For The Department: SCIS January Session 2015Document2 paginiCentralised Time Table: Time Table For The Department: SCIS January Session 2015robinthomas176693Încă nu există evaluări
- All New ASAC XFactor Complete Guide To Adsense Authority WebsitesDocument217 paginiAll New ASAC XFactor Complete Guide To Adsense Authority WebsitesKārlis Šēns100% (1)
- Holidays List 2011Document3 paginiHolidays List 2011robinthomas176693Încă nu există evaluări
- CDocument15 paginiCNaga DeviÎncă nu există evaluări
- PDFSigQFormalRep PDFDocument1 paginăPDFSigQFormalRep PDFJim LeeÎncă nu există evaluări
- Presentation Secrets of Steve JobsDocument13 paginiPresentation Secrets of Steve JobsElvin Ryanto100% (1)
- Initial Parent LetterDocument3 paginiInitial Parent Letterapi-237711646Încă nu există evaluări
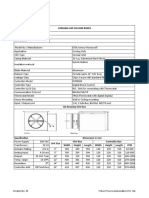
- VAV Honeywell Tech SubmittalDocument1 paginăVAV Honeywell Tech SubmittalMUHAMMED SHAFEEQÎncă nu există evaluări
- Run-Ons Comma Splices & FragmentsDocument3 paginiRun-Ons Comma Splices & Fragments2484688644wuboyuanÎncă nu există evaluări
- 0500 First Language English Learner GuideDocument32 pagini0500 First Language English Learner GuideHina imranÎncă nu există evaluări
- Unit 06 The First University in Viet Nam Lesson 3 A Closer Look 2Document14 paginiUnit 06 The First University in Viet Nam Lesson 3 A Closer Look 2Thơ NguyễnÎncă nu există evaluări
- Capstone ResearchDocument27 paginiCapstone ResearchRefugio, Quince MacamÎncă nu există evaluări
- Business EtiquetteDocument11 paginiBusiness EtiquetteSubhadra RamkumarÎncă nu există evaluări
- PPL UNIT 1a PDFDocument11 paginiPPL UNIT 1a PDFsatya sriÎncă nu există evaluări
- Muslim TRIBE in PhilDocument13 paginiMuslim TRIBE in PhilRohanisaZacariaPangcoga100% (1)
- Colegio de San Juan de Letran-Calamba: DEPARTMENT: Basic Education Department - High SchoolDocument8 paginiColegio de San Juan de Letran-Calamba: DEPARTMENT: Basic Education Department - High SchoolNicÎncă nu există evaluări
- Diagnosis and Management of Acute StrokeDocument74 paginiDiagnosis and Management of Acute StrokeDonnaBells Hermo Labaniego100% (2)
- Antonio - Level A Case 1Document3 paginiAntonio - Level A Case 1Veronica Alvarez-GallosoÎncă nu există evaluări
- CE246 Practical List Database Management SystemDocument27 paginiCE246 Practical List Database Management SystemnooneÎncă nu există evaluări
- Jurnal Riset Sains Manajemen: Volume 2, Nomor 3, 2018Document9 paginiJurnal Riset Sains Manajemen: Volume 2, Nomor 3, 2018Deedii DdkrnwnÎncă nu există evaluări
- KP Astrology AstrosageDocument4 paginiKP Astrology AstrosagepjpropraveenssÎncă nu există evaluări
- VvNp-booklet-2012 UMBERTO ECO PDFDocument64 paginiVvNp-booklet-2012 UMBERTO ECO PDFTadeoÎncă nu există evaluări
- Oracle Database 18c Install & Upgrade CourseDocument5 paginiOracle Database 18c Install & Upgrade CoursevineetÎncă nu există evaluări
- 0500 Example Candidate Responses Paper 2 (For Examination From 2020)Document31 pagini0500 Example Candidate Responses Paper 2 (For Examination From 2020)Hina imranÎncă nu există evaluări
- SummarizingDocument2 paginiSummarizingJuan Felipe VasquezÎncă nu există evaluări
- Ca in Lieu of ExamsDocument19 paginiCa in Lieu of ExamsWajiihah BaureekÎncă nu există evaluări
- Activate Voice Mail and Forward CallsDocument3 paginiActivate Voice Mail and Forward CallsmohÎncă nu există evaluări
- Trading View Shortcut KeysDocument10 paginiTrading View Shortcut KeysVenu GadadasuÎncă nu există evaluări
- SFDC CRM Ready Reckoner for TestersDocument59 paginiSFDC CRM Ready Reckoner for Testerskarthick_49Încă nu există evaluări
- Second Language Learners and Their Self-Confidence in Using EnglishDocument20 paginiSecond Language Learners and Their Self-Confidence in Using EnglishPhuong Trinh NguyenÎncă nu există evaluări
- 10 BÀI ĐỌCDocument29 pagini10 BÀI ĐỌCnhianh2512Încă nu există evaluări
- Critical Approaches To Literature and Criticism: The Reader Audience Literary Work FormDocument2 paginiCritical Approaches To Literature and Criticism: The Reader Audience Literary Work FormJeenica PalconeÎncă nu există evaluări
- Some Basic Properties of English Syntax Some Remarks On The Essence of Human LanguageDocument3 paginiSome Basic Properties of English Syntax Some Remarks On The Essence of Human Languagewawan100% (1)
- Experiments in The Perception of Stress by D.B. Fry (1958)Document28 paginiExperiments in The Perception of Stress by D.B. Fry (1958)MarsÎncă nu există evaluări
- Oxe12.1 SD PrivateNetworks 8AL91006USAE 1 en PDFDocument376 paginiOxe12.1 SD PrivateNetworks 8AL91006USAE 1 en PDFK Mei.Încă nu există evaluări
- Pcom (Quiz)Document3 paginiPcom (Quiz)kim angelo ulleroÎncă nu există evaluări