S-ar putea să vă placă și
- Load Case Analysis For A Resonant Wave Energy ConverterDocument209 paginiLoad Case Analysis For A Resonant Wave Energy ConverterLoc NguyenÎncă nu există evaluări
- Cycle As Freight May 2009Document93 paginiCycle As Freight May 2009Loc NguyenÎncă nu există evaluări
- Design and Development of Unmanned Aerial Vehicle (Drone) For Civil ApplicationsDocument63 paginiDesign and Development of Unmanned Aerial Vehicle (Drone) For Civil ApplicationsLoc NguyenÎncă nu există evaluări
- Small-Scale Vertical Axis Wind Turbine DesignDocument69 paginiSmall-Scale Vertical Axis Wind Turbine Designimbran93Încă nu există evaluări
- Thermo 2 Topic 4 2011 CompleteDocument28 paginiThermo 2 Topic 4 2011 CompleteLoc NguyenÎncă nu există evaluări
- Recumbent Trike Design PrimerDocument37 paginiRecumbent Trike Design PrimerhdfarshadÎncă nu există evaluări
- Fuel Cell AssignmentDocument11 paginiFuel Cell AssignmentLoc NguyenÎncă nu există evaluări
- Energy From Ocean Waves ImDocument132 paginiEnergy From Ocean Waves ImkeethanÎncă nu există evaluări
- KTH-RIT Biplane Wells Turbine CFD and Experimental AnalysisDocument93 paginiKTH-RIT Biplane Wells Turbine CFD and Experimental AnalysisLoc NguyenÎncă nu există evaluări
- Assignment 2Document12 paginiAssignment 2Loc NguyenÎncă nu există evaluări
- Thermo 2 Topic 4 2011 CompleteDocument28 paginiThermo 2 Topic 4 2011 CompleteLoc NguyenÎncă nu există evaluări
- Implementing FEA for Axially Loaded PlateDocument13 paginiImplementing FEA for Axially Loaded PlateJo JoÎncă nu există evaluări
- Fea Assingment 1 - Final - Online-123Document6 paginiFea Assingment 1 - Final - Online-123Loc NguyenÎncă nu există evaluări
- ETHIOPIA: Connecting Coffee Farmers To MarketDocument1 paginăETHIOPIA: Connecting Coffee Farmers To MarketLoc NguyenÎncă nu există evaluări
- AnsysDocument7 paginiAnsyskiran_wakchaureÎncă nu există evaluări
- Hydraulic Design ReportDocument47 paginiHydraulic Design ReportLoc NguyenÎncă nu există evaluări
- Turntable Rotary Actuator R2Document6 paginiTurntable Rotary Actuator R2Loc NguyenÎncă nu există evaluări
- Facts Sheet - Wind Power - FINAL May 2012Document2 paginiFacts Sheet - Wind Power - FINAL May 2012Loc NguyenÎncă nu există evaluări
- Telescopic Boom Force AnalysisDocument4 paginiTelescopic Boom Force AnalysisLoc NguyenÎncă nu există evaluări
- Department of Mechanical Engineering: Coursework SubmissionDocument13 paginiDepartment of Mechanical Engineering: Coursework SubmissionLoc NguyenÎncă nu există evaluări
- PT-MT Kurs NotuDocument300 paginiPT-MT Kurs NotuBahadir TekinÎncă nu există evaluări
- Fea DoneDocument17 paginiFea DoneLoc NguyenÎncă nu există evaluări
- Report1 FEADocument4 paginiReport1 FEALoc NguyenÎncă nu există evaluări
- Report2 FEADocument6 paginiReport2 FEALoc NguyenÎncă nu există evaluări
- Telescopic Boom Force AnalysisDocument4 paginiTelescopic Boom Force AnalysisLoc NguyenÎncă nu există evaluări
- Electricity Theory Questions + Some DerivationsDocument6 paginiElectricity Theory Questions + Some DerivationsLoc NguyenÎncă nu există evaluări
- Contrarotating PropfanDocument11 paginiContrarotating PropfanDr.S.Ramamurthy100% (1)
- Handbook of Operational Amplifier ApplicationsDocument94 paginiHandbook of Operational Amplifier Applicationshermiit89% (9)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Concentrating Solar Power: Clean Energy For The Electric GridDocument14 paginiConcentrating Solar Power: Clean Energy For The Electric Gridfran01334Încă nu există evaluări
- Physics 219 Practice Exam 1 Multiple Choice QuestionsDocument6 paginiPhysics 219 Practice Exam 1 Multiple Choice QuestionserjayprakashpatelÎncă nu există evaluări
- Giz2014 en Market Potential Study Organic Rankine Cycle Technology India PDFDocument68 paginiGiz2014 en Market Potential Study Organic Rankine Cycle Technology India PDFdolphinÎncă nu există evaluări
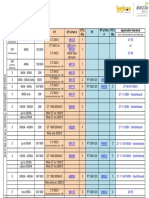
- CT/PT Selection Chart: Applicable Standard (A) (V) CT's Qty PT PT's Part # PT's Qty Service Size CT CT's Part # PhaseDocument1 paginăCT/PT Selection Chart: Applicable Standard (A) (V) CT's Qty PT PT's Part # PT's Qty Service Size CT CT's Part # PhasePrabakar PÎncă nu există evaluări
- Daewoo 4603Document42 paginiDaewoo 4603David LovatoÎncă nu există evaluări
- Thermal Power Plant: " " NTPC (Dadri)Document17 paginiThermal Power Plant: " " NTPC (Dadri)Kulvinder SinghÎncă nu există evaluări
- Manta To Richmond SIMOPS Risk Matrix FINALDocument1 paginăManta To Richmond SIMOPS Risk Matrix FINALDesmond Chang50% (2)
- Bahrain World Trade Center Integrated Wind TurbinesDocument73 paginiBahrain World Trade Center Integrated Wind TurbinesMaisie SuyatÎncă nu există evaluări
- Convair Traveler Vol. X 1958-59Document180 paginiConvair Traveler Vol. X 1958-59TateÎncă nu există evaluări
- Damage Control BookDocument88 paginiDamage Control BookMiguel RatonÎncă nu există evaluări
- Paradeep Refinery Project: A Sunrise Project For A Sunshine FutureDocument35 paginiParadeep Refinery Project: A Sunrise Project For A Sunshine Futuremujeebtalib80% (5)
- Hybrid Safety and Service Procedures: Automotive Technology, Fifth EditionDocument40 paginiHybrid Safety and Service Procedures: Automotive Technology, Fifth EditionSkyAnimal ChannelÎncă nu există evaluări
- Alok Mitra NotesDocument5 paginiAlok Mitra NotesSukanya GuhaÎncă nu există evaluări
- 29B - Acid Gas Removal TechnologyDocument17 pagini29B - Acid Gas Removal Technologyarlucky5459100% (1)
- Catalogo Coldside MarcasDocument93 paginiCatalogo Coldside MarcasDaniel VeraÎncă nu există evaluări
- Liu JCP2019 Data Driven Intelligent Location Public Charging StationsDocument11 paginiLiu JCP2019 Data Driven Intelligent Location Public Charging StationsRodrigoÎncă nu există evaluări
- Calibrar Slide Valve y Slid Stop en Compresor NH3Document4 paginiCalibrar Slide Valve y Slid Stop en Compresor NH3Hector0412Încă nu există evaluări
- Power and Wiring Cables GuideDocument82 paginiPower and Wiring Cables GuideZzzdddÎncă nu există evaluări
- User Manual Gd30fdcDocument17 paginiUser Manual Gd30fdcdedo3Încă nu există evaluări
- q801 Junior Engineer Part IIDocument28 paginiq801 Junior Engineer Part IIRohan ChaudharyÎncă nu există evaluări
- Pratt & Whitney Canada: Maintenance Manual MANUAL PART NO. 3034342Document18 paginiPratt & Whitney Canada: Maintenance Manual MANUAL PART NO. 3034342EstebanÎncă nu există evaluări
- Hypercell 1994 Engl by Hans HassDocument126 paginiHypercell 1994 Engl by Hans HassClaimDestinyÎncă nu există evaluări
- Cat Marine Engine ProgramDocument4 paginiCat Marine Engine ProgramRobert BeddingfieldÎncă nu există evaluări
- Catalase TestDocument2 paginiCatalase TestsekaralingamÎncă nu există evaluări
- CH-2 IS MATTER AROUND US PUREDocument2 paginiCH-2 IS MATTER AROUND US PUREgurdeepsarora8738100% (1)
- 7 Transformer-ProtectionDocument42 pagini7 Transformer-Protectionmuaz_aminu1422Încă nu există evaluări
- Exercise-01 Check Your Grasp: O CH HO HODocument7 paginiExercise-01 Check Your Grasp: O CH HO HOChesta MalhotraÎncă nu există evaluări
- Tryptone Broth: Code Description SizeDocument2 paginiTryptone Broth: Code Description SizeSeaGate IvyBridge MsiNvidiaÎncă nu există evaluări
- Power Electronics For Renewable Energy Systems PDFDocument160 paginiPower Electronics For Renewable Energy Systems PDFSUSHITAÎncă nu există evaluări
- Currents in The OceanDocument51 paginiCurrents in The OceanseabirchÎncă nu există evaluări