S-ar putea să vă placă și
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- T-1 3/4 (5mm) SOLID STATE LAMPDocument6 paginiT-1 3/4 (5mm) SOLID STATE LAMPLuis Ramos PumaÎncă nu există evaluări
- Baldor MotorsDocument124 paginiBaldor Motorsangel_basualdoÎncă nu există evaluări
- Baldor MotorsDocument124 paginiBaldor Motorsangel_basualdoÎncă nu există evaluări
- Road-Marking Analysis For Autonomous Vehicle GuidanceDocument6 paginiRoad-Marking Analysis For Autonomous Vehicle GuidanceLuis Ramos PumaÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- ST5461D07-1 - Product Spec - Ver0 2 20160726Document32 paginiST5461D07-1 - Product Spec - Ver0 2 20160726Birciu ValiÎncă nu există evaluări
- Electronic Instruments: Working of D'Arsonval MeterDocument30 paginiElectronic Instruments: Working of D'Arsonval MeterKarthik VÎncă nu există evaluări
- 100% Electric: Vision+Document5 pagini100% Electric: Vision+yonggilÎncă nu există evaluări
- ASPEN Software - Introduction: Assignment #6 - Intro To ASPEN Software & Using It To Solve Assignment #4Document5 paginiASPEN Software - Introduction: Assignment #6 - Intro To ASPEN Software & Using It To Solve Assignment #4Javier MaldonadoÎncă nu există evaluări
- Eee w-12Document512 paginiEee w-12mwkthangkwrÎncă nu există evaluări
- Philips Catalog Luminaires Indoor CEE 2015Document323 paginiPhilips Catalog Luminaires Indoor CEE 2015Muhammad Adrianto LubisÎncă nu există evaluări
- EENG565L - Thyristors - SCRDocument28 paginiEENG565L - Thyristors - SCRFady Richard Abi RaadÎncă nu există evaluări
- Server HardwareDocument21 paginiServer HardwareAamirPathanÎncă nu există evaluări
- DMC 700SC Datasheet Range enDocument4 paginiDMC 700SC Datasheet Range enzeto zamiÎncă nu există evaluări
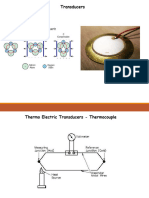
- Transducers - GTU DiplomaDocument27 paginiTransducers - GTU Diplomandm.jhdpÎncă nu există evaluări
- Tascam CD-gt1 ManualDocument16 paginiTascam CD-gt1 Manualheritage336Încă nu există evaluări
- Assembly-Power Distribution Center C7: Connector DetailsDocument4 paginiAssembly-Power Distribution Center C7: Connector DetailsEnrique Arevalo LeyvaÎncă nu există evaluări
- Vp01-03-04-Axitub Solid 4-800T 30-6 - UkDocument2 paginiVp01-03-04-Axitub Solid 4-800T 30-6 - UkConstantin294Încă nu există evaluări
- Thyristor Module: 3 Rectifier Bridge, Half-Controlled (High-Side) + Free Wheeling DiodeDocument5 paginiThyristor Module: 3 Rectifier Bridge, Half-Controlled (High-Side) + Free Wheeling DiodeMohamed ReyadÎncă nu există evaluări
- AC1240 Jan 2012Document169 paginiAC1240 Jan 2012taoistpengÎncă nu există evaluări
- Second Order Systems: Q C Di DT D Q DT DQ DT Q CDocument6 paginiSecond Order Systems: Q C Di DT D Q DT DQ DT Q CSiddharth ShahÎncă nu există evaluări
- Tanweer CVDocument1 paginăTanweer CVlna_cooolmadina5742Încă nu există evaluări
- Service Manual: Compact Component SystemDocument93 paginiService Manual: Compact Component Systemsaputra ekaÎncă nu există evaluări
- Dspace-Paper Hil Overview Waeltermann e 160405 PDFDocument14 paginiDspace-Paper Hil Overview Waeltermann e 160405 PDFPranay VermaÎncă nu există evaluări
- Alistart 46Document55 paginiAlistart 46leyvafersanÎncă nu există evaluări
- V Series Temperature Controllers User's Manual: (21) Specifications (22) WiringDocument4 paginiV Series Temperature Controllers User's Manual: (21) Specifications (22) WiringluisÎncă nu există evaluări
- TND 063191 135912Document180 paginiTND 063191 135912Kanupriya AgarwalÎncă nu există evaluări
- Congestion Management in Power Transmission Network Under Line Interruption Condition Using TCSCDocument7 paginiCongestion Management in Power Transmission Network Under Line Interruption Condition Using TCSCDr. Gollapalli NareshÎncă nu există evaluări
- Lock Picking Hotel RoomsDocument22 paginiLock Picking Hotel Roomsbiffbuff99Încă nu există evaluări
- RPMAC Cooling Tower MotionDocument58 paginiRPMAC Cooling Tower Motionmridu ranjanÎncă nu există evaluări
- Adaptive Modulation and Coding: Master Universitario en Ingenier Ia de Telecomunicaci OnDocument19 paginiAdaptive Modulation and Coding: Master Universitario en Ingenier Ia de Telecomunicaci OnHillÎncă nu există evaluări
- Chapter 6 Soc EncounterDocument222 paginiChapter 6 Soc EncounterSumanth VarmaÎncă nu există evaluări
- Arm Flexible Access Data Sheet PDFDocument7 paginiArm Flexible Access Data Sheet PDFmisterÎncă nu există evaluări
- UF4001 UF4007: 1.0 Amp High Efficiency RectifiersDocument2 paginiUF4001 UF4007: 1.0 Amp High Efficiency RectifiersYonathan LopezÎncă nu există evaluări