S-ar putea să vă placă și
- Modern Intelligent Instruments - Theory and ApplicationDe la EverandModern Intelligent Instruments - Theory and ApplicationÎncă nu există evaluări
- Real-Time Fuzzy Microcontroller PDFDocument6 paginiReal-Time Fuzzy Microcontroller PDFsamyÎncă nu există evaluări
- Switched Systems, Stability of Switched Systems in Sense of LyapunovDocument200 paginiSwitched Systems, Stability of Switched Systems in Sense of LyapunovMamdouh KhudaydusÎncă nu există evaluări
- Dan Saks C++ in Embedded SystemsDocument24 paginiDan Saks C++ in Embedded SystemsarunksahaÎncă nu există evaluări
- Smith Predictor Control and Internal ModelDocument5 paginiSmith Predictor Control and Internal Modeldsshin_psÎncă nu există evaluări
- Diploma Project 1st Presentation PPT TemplateDocument13 paginiDiploma Project 1st Presentation PPT TemplateJay PatelÎncă nu există evaluări
- Ball and Beam AssignmentDocument4 paginiBall and Beam AssignmentBalayogi GÎncă nu există evaluări
- FinalDocument10 paginiFinalAbhay RaichandÎncă nu există evaluări
- Sensors 18 01212 PDFDocument24 paginiSensors 18 01212 PDFSimona NicoletaÎncă nu există evaluări
- Robust Face Recognition Under Difficult Lighting ConditionsDocument4 paginiRobust Face Recognition Under Difficult Lighting ConditionsijecctÎncă nu există evaluări
- SS Lab ManualDocument48 paginiSS Lab ManualKannan RÎncă nu există evaluări
- KL 200 PDFDocument4 paginiKL 200 PDFghenriquezÎncă nu există evaluări
- RNSF Curs1Document51 paginiRNSF Curs1Radu Alin BurteaÎncă nu există evaluări
- Ball and Beam1Document6 paginiBall and Beam1Saeed AsiriÎncă nu există evaluări
- Open Sim Tutorial 3Document8 paginiOpen Sim Tutorial 3Jobin VargheseÎncă nu există evaluări
- HX711 Weighing Sensor ModuleDocument2 paginiHX711 Weighing Sensor ModuleuqinkÎncă nu există evaluări
- Microsoft Word - INTRODUCTION TO PLC CONTROLLERSDocument115 paginiMicrosoft Word - INTRODUCTION TO PLC CONTROLLERSMilan RakshitÎncă nu există evaluări
- Eccpr PassedDocument86 paginiEccpr PassedRadu NeculaÎncă nu există evaluări
- Laser Communication SystemDocument4 paginiLaser Communication Systemjose273Încă nu există evaluări
- Laser Based Communication System PDFDocument3 paginiLaser Based Communication System PDFPawan Kumar100% (1)
- Information Systems Security LAB: RSA Cryptography AlgorithmDocument9 paginiInformation Systems Security LAB: RSA Cryptography AlgorithmAbdullah Al-HallakÎncă nu există evaluări
- Position Weight MatrixDocument4 paginiPosition Weight MatrixAnonymous E4Rbo2sÎncă nu există evaluări
- Manual Familia EASYDocument24 paginiManual Familia EASYedgar_drg369Încă nu există evaluări
- ModTech2015 Program Book of AbstractsDocument293 paginiModTech2015 Program Book of AbstractsBuluc GheorgheÎncă nu există evaluări
- Implementation of Linked ListDocument7 paginiImplementation of Linked Listkare jai saiÎncă nu există evaluări
- Cid - EttiDocument380 paginiCid - EttiCilibiu Ionuţ-AlinÎncă nu există evaluări
- Laser CommunicationDocument3 paginiLaser CommunicationVishal KumarÎncă nu există evaluări
- AC Generator Simulation Using FEMM and LuaDocument6 paginiAC Generator Simulation Using FEMM and LuaSushant ChhotrayÎncă nu există evaluări
- Ball & Beam DocumentDocument8 paginiBall & Beam DocumentJorge PorrasÎncă nu există evaluări
- Examen PCLP InfopucDocument3 paginiExamen PCLP InfopucCrasmari ioanÎncă nu există evaluări
- BLDC Sinusoidal ControlDocument6 paginiBLDC Sinusoidal ControlOctavian MîrţiÎncă nu există evaluări
- Xerox Phaser 3117 Service ManualDocument129 paginiXerox Phaser 3117 Service Manualanon_259969174100% (1)
- On The Modified Smith Predictor For Controlling A Process With An Integrator and Long Dead-TimeDocument4 paginiOn The Modified Smith Predictor For Controlling A Process With An Integrator and Long Dead-TimeAbhay RaichandÎncă nu există evaluări
- Feedback 38-004Document15 paginiFeedback 38-004aditya narayan shuklaÎncă nu există evaluări
- AN001-Control Design of 100-kW PMSM DriveDocument9 paginiAN001-Control Design of 100-kW PMSM DriveRudhi KurniawanÎncă nu există evaluări
- Adaptive Cruise Control Using Model Predictive ControllerDocument3 paginiAdaptive Cruise Control Using Model Predictive ControllerInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Discovery of BLDC Motor: Brushless vs. Brushed DC MotorDocument9 paginiDiscovery of BLDC Motor: Brushless vs. Brushed DC MotorNoni MaheshwariÎncă nu există evaluări
- A New Chaotic System For Image EncryptionDocument5 paginiA New Chaotic System For Image EncryptionMENANI ZineddineÎncă nu există evaluări
- On Brushless Motor.Document45 paginiOn Brushless Motor.KUMAR_AMIT199189% (9)
- Ch1 Introduction To Control SystemsDocument10 paginiCh1 Introduction To Control SystemsNasiha MokhtaruddinÎncă nu există evaluări
- A Seminar ON Compliant Mechanisms: Kaje Rajesh S. En. No. 30802009 TY B-Tech Mechanical EngineeringDocument21 paginiA Seminar ON Compliant Mechanisms: Kaje Rajesh S. En. No. 30802009 TY B-Tech Mechanical EngineeringRajesh Shyamrao Kaje100% (2)
- BioMedical TelemetryDocument7 paginiBioMedical TelemetrySean Matthew L. OcampoÎncă nu există evaluări
- Omron Microswitch PDFDocument283 paginiOmron Microswitch PDFJosephus Ravanera100% (1)
- HFSS Tutorial 4: 20-dB Microstrip Coupled Line: W L W S BDocument6 paginiHFSS Tutorial 4: 20-dB Microstrip Coupled Line: W L W S Bamit261287Încă nu există evaluări
- Line Following Robot in VerilogDocument12 paginiLine Following Robot in VerilogAparna GopalÎncă nu există evaluări
- HMI and SCADA SystemsDocument9 paginiHMI and SCADA SystemsFran JimenezÎncă nu există evaluări
- A Generic RTOS Model For Real-Time Systems Simulation With SystemCDocument6 paginiA Generic RTOS Model For Real-Time Systems Simulation With SystemCnithin s gowdaÎncă nu există evaluări
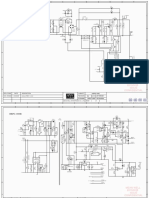
- HRPG 1000 R2 SchematicDocument5 paginiHRPG 1000 R2 Schematic劉品賢Încă nu există evaluări
- Transformate Laplace Tabel de ValoriDocument8 paginiTransformate Laplace Tabel de ValoriMarius ChircaÎncă nu există evaluări
- Electronic Controls Handbook: DixellDocument41 paginiElectronic Controls Handbook: DixellFran RodriguezÎncă nu există evaluări
- Comenzi LinuxDocument4 paginiComenzi LinuxKifa PetraÎncă nu există evaluări
- Retele Neuronale ConvolutionaleDocument60 paginiRetele Neuronale ConvolutionaleElena CioroabaÎncă nu există evaluări
- Delta Instruments Regulator PIDDocument7 paginiDelta Instruments Regulator PIDRuth Alma CotrutaÎncă nu există evaluări
- A New Design 6T Full Adder Circuit Using Novel 2T XNOR GatesDocument7 paginiA New Design 6T Full Adder Circuit Using Novel 2T XNOR GatesdycsteiznÎncă nu există evaluări
- LoRa v01 PDFDocument38 paginiLoRa v01 PDFEmilian LpÎncă nu există evaluări
- Quartus Tutorial 2 Simulation PDFDocument25 paginiQuartus Tutorial 2 Simulation PDFBill GonzálezÎncă nu există evaluări
- SVPWM PDFDocument5 paginiSVPWM PDFmauricetappaÎncă nu există evaluări
- Application To Control High Frequency Rehabilitation Robot Based On ADRCDocument13 paginiApplication To Control High Frequency Rehabilitation Robot Based On ADRCNguyễn LinhÎncă nu există evaluări
- Identification and Estimation (Empirical Models) : D T U G T yDocument11 paginiIdentification and Estimation (Empirical Models) : D T U G T yAnonymous JDXbBDBÎncă nu există evaluări
- MTH212 (Chap3)Document25 paginiMTH212 (Chap3)俄狄浦斯Încă nu există evaluări
- Review of Esu Yoruba God Power and The IDocument7 paginiReview of Esu Yoruba God Power and The IBoris MilovicÎncă nu există evaluări
- The Victory PrayerDocument2 paginiThe Victory PrayerJamohl Supremo AlexanderÎncă nu există evaluări
- 3 2947Document32 pagini3 2947Lei ZhouÎncă nu există evaluări
- Database Management System (DBMS) 2620003Document3 paginiDatabase Management System (DBMS) 2620003mcabca5094Încă nu există evaluări
- 11 Ways To Be Passive Aggressive - An Essential Pocket Guide - Talking ShrimpDocument18 pagini11 Ways To Be Passive Aggressive - An Essential Pocket Guide - Talking ShrimpRehab WahshÎncă nu există evaluări
- Csat b02 FinalDocument24 paginiCsat b02 FinalSanjeev KumarÎncă nu există evaluări
- Tar An GasDocument19 paginiTar An Gasrama_bhpÎncă nu există evaluări
- A Case Study On The Implementation of Knowledge ManagementDocument10 paginiA Case Study On The Implementation of Knowledge ManagementEmmangeorgeÎncă nu există evaluări
- Andrew Smith (Auth.) - Porphyry's Place in The Neoplatonic Tradition - A Study in Post-Plotinian Neoplatonism-Springer Netherlands (1975) PDFDocument187 paginiAndrew Smith (Auth.) - Porphyry's Place in The Neoplatonic Tradition - A Study in Post-Plotinian Neoplatonism-Springer Netherlands (1975) PDFNilo Gelais Costa JuniorÎncă nu există evaluări
- B.SC II MatematicsDocument26 paginiB.SC II MatematicsNaveen Kumar SinghÎncă nu există evaluări
- The 2016 Presidential Election-An Abundance of ControversiesDocument20 paginiThe 2016 Presidential Election-An Abundance of ControversiesHoover InstitutionÎncă nu există evaluări
- (Philosophy and Medicine 130) Peter J. Cataldo, Dan O'Brien - Palliative Care and Catholic Health Care - Two Millennia of Caring For The Whole Person-Springer International Publishing (2019) PDFDocument285 pagini(Philosophy and Medicine 130) Peter J. Cataldo, Dan O'Brien - Palliative Care and Catholic Health Care - Two Millennia of Caring For The Whole Person-Springer International Publishing (2019) PDFRisky Setyo Putri100% (1)
- Decoding Toyota's DNA Rev 1Document9 paginiDecoding Toyota's DNA Rev 1Mike GlezÎncă nu există evaluări
- Lesson Plan ReadingDocument7 paginiLesson Plan ReadingNiar SamandiÎncă nu există evaluări
- Child's GuideDocument14 paginiChild's Guidet59409t045Încă nu există evaluări
- Daily Lesson PlanDocument2 paginiDaily Lesson PlanDivine OngÎncă nu există evaluări
- Adinkra Index: West African Wisdom: Adinkra Symbols & MeaningsDocument5 paginiAdinkra Index: West African Wisdom: Adinkra Symbols & MeaningsAlessandro GagnaÎncă nu există evaluări
- James Brian GDocument5 paginiJames Brian GJames Brian Garcia GarayÎncă nu există evaluări
- Arnsperger - Integral Economics ManifestoDocument12 paginiArnsperger - Integral Economics ManifestoAlfredo del ValleÎncă nu există evaluări
- WNL Want To Lose Weight Eat Off A Crinkly Plate UppDocument5 paginiWNL Want To Lose Weight Eat Off A Crinkly Plate UppJames FarnhamÎncă nu există evaluări
- An Introduction To The Baha'i FaithDocument22 paginiAn Introduction To The Baha'i FaithBaha'i Literature95% (22)
- Flow Induced Vibration Choke ValvesDocument8 paginiFlow Induced Vibration Choke Valvesharmeeksingh01Încă nu există evaluări
- Entity Relationship DiagramDocument80 paginiEntity Relationship DiagramAmer FarooqÎncă nu există evaluări
- Communicating EU Research and InnovationDocument24 paginiCommunicating EU Research and InnovationAleksandraVidicÎncă nu există evaluări
- Use Mathematical Concept and TechniquesDocument67 paginiUse Mathematical Concept and Techniquesvillamor niez63% (8)
- A Schematic Model of Baryons and MesonsDocument2 paginiA Schematic Model of Baryons and MesonscoerenciaceÎncă nu există evaluări
- What Should Then Be Done and THE TRAVELLER - IIS - Allama IqbalDocument35 paginiWhat Should Then Be Done and THE TRAVELLER - IIS - Allama IqbalInternational Iqbal Society100% (1)
- AP. Latin PhrasesDocument162 paginiAP. Latin PhrasesKokak Delights100% (1)
- Understanding Participation in Sport and Physical Activity Among Children and Adults A Review of Qualitative Studies, PDFDocument10 paginiUnderstanding Participation in Sport and Physical Activity Among Children and Adults A Review of Qualitative Studies, PDFisaÎncă nu există evaluări
- DLP-INTRO TO PHILO Week 2Document6 paginiDLP-INTRO TO PHILO Week 2Ann Maureen ConcepcionÎncă nu există evaluări