S-ar putea să vă placă și
- Eobd2 Diagnose PDFDocument1 paginăEobd2 Diagnose PDFAlexandre Da Silva PintoÎncă nu există evaluări
- MAC MPC Programmer ModificationDocument5 paginiMAC MPC Programmer ModificationAlexandre Da Silva Pinto100% (1)
- FGTech BDM JTAG DRIVER LIST PDFDocument7 paginiFGTech BDM JTAG DRIVER LIST PDFAlexandre Da Silva PintoÎncă nu există evaluări
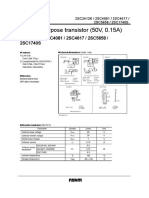
- 2 SC 2412 KDocument4 pagini2 SC 2412 KAlexandre Da Silva PintoÎncă nu există evaluări
- Fgtech Driver List CarDocument46 paginiFgtech Driver List CarAlexandre Da Silva PintoÎncă nu există evaluări
- Instruction Sorento35Document1 paginăInstruction Sorento35Alexandre Da Silva PintoÎncă nu există evaluări
- Connect As Below:: Serial Suite: ECU PlugDocument4 paginiConnect As Below:: Serial Suite: ECU PlugAlexandre Da Silva Pinto100% (1)
- Instruction IAW 5sfidea-Musa 800Document3 paginiInstruction IAW 5sfidea-Musa 800Alexandre Da Silva PintoÎncă nu există evaluări
- Instruction IAW 6lp 800Document3 paginiInstruction IAW 6lp 800Alexandre Da Silva Pinto100% (1)
- Instruction Mitsubishi GrandisDocument1 paginăInstruction Mitsubishi GrandisAlexandre Da Silva Pinto100% (2)
- Instruction SubaruDocument1 paginăInstruction SubaruAlexandre Da Silva Pinto100% (1)
- Connect As Below:: Serial Suite: ECU PlugDocument4 paginiConnect As Below:: Serial Suite: ECU PlugAlexandre Da Silva PintoÎncă nu există evaluări
- ECU: Suzuki Swift 1.6: Connect As BelowDocument4 paginiECU: Suzuki Swift 1.6: Connect As BelowAlexandre Da Silva Pinto100% (1)
- ECU: Mitsubishi Pajero 3.2: Power Supply GND Ground K Line Flash Voltage (+16 Volt)Document1 paginăECU: Mitsubishi Pajero 3.2: Power Supply GND Ground K Line Flash Voltage (+16 Volt)Alexandre Da Silva Pinto100% (1)
- Isuzu Transtrom READ WR PDFDocument4 paginiIsuzu Transtrom READ WR PDFAlexandre Da Silva PintoÎncă nu există evaluări
- Instruction Delphi Dcm12Document2 paginiInstruction Delphi Dcm12Alexandre Da Silva PintoÎncă nu există evaluări
- Instruction IAW 6lp - 800 - PDFDocument3 paginiInstruction IAW 6lp - 800 - PDFAlexandre Da Silva Pinto100% (2)
- ECU: Mitsubishi Lancer 2.0 16v: Power Supply GND Ground K Line Flash Voltage (+16 Volt)Document1 paginăECU: Mitsubishi Lancer 2.0 16v: Power Supply GND Ground K Line Flash Voltage (+16 Volt)Alexandre Da Silva PintoÎncă nu există evaluări
- Instruction Lancer Evo.6.7.8Document1 paginăInstruction Lancer Evo.6.7.8Alexandre Da Silva PintoÎncă nu există evaluări
- Instruction IAW 59F 5AF 800Document3 paginiInstruction IAW 59F 5AF 800Alexandre Da Silva Pinto0% (1)
- Instruction IAW 4TV 800Document3 paginiInstruction IAW 4TV 800Alexandre Da Silva PintoÎncă nu există evaluări
- 12 Engine LubricationDocument9 pagini12 Engine LubricationAlexandre Da Silva PintoÎncă nu există evaluări
- ECU: Jonson Valeo: Connect As BelowDocument2 paginiECU: Jonson Valeo: Connect As BelowAlexandre Da Silva PintoÎncă nu există evaluări
- Instruction Lancer Evo9Document1 paginăInstruction Lancer Evo9Alexandre Da Silva PintoÎncă nu există evaluări
- Instruction ME7.4.5 PDFDocument2 paginiInstruction ME7.4.5 PDFAlexandre Da Silva PintoÎncă nu există evaluări
- Instruction Delphi Dcm12Document2 paginiInstruction Delphi Dcm12Alexandre Da Silva PintoÎncă nu există evaluări
- Connect As Below:: Serial Suite: ECU PlugDocument4 paginiConnect As Below:: Serial Suite: ECU PlugAlexandre Da Silva PintoÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Manuale捲板機Document96 paginiManuale捲板機Andy WuÎncă nu există evaluări
- Reflection PseudoscienceDocument3 paginiReflection PseudoscienceSuganthi RamasamyÎncă nu există evaluări
- Case Digest 2 S.C. MEGAWORLD CONSTRUCTIONDocument3 paginiCase Digest 2 S.C. MEGAWORLD CONSTRUCTIONRomualdo CabanesasÎncă nu există evaluări
- RLB Procuring For Value 18 July PDFDocument56 paginiRLB Procuring For Value 18 July PDFDaniel LixandruÎncă nu există evaluări
- Melo V PeopleDocument1 paginăMelo V PeoplejjangÎncă nu există evaluări
- Bajaj Holdings & Investment Ltd. - Research Center: Balance SheetDocument6 paginiBajaj Holdings & Investment Ltd. - Research Center: Balance Sheetsarathkumarreddy855081Încă nu există evaluări
- J2 P IntroductionDocument9 paginiJ2 P IntroductionnitinvnjÎncă nu există evaluări
- List of All Run Commands For WindowsDocument10 paginiList of All Run Commands For Windowsdixityog100% (1)
- Taxation One Complete Updated (Atty. Mickey Ingles)Document116 paginiTaxation One Complete Updated (Atty. Mickey Ingles)Patty Salas - Padua100% (11)
- Cooper - Formal Review of Karla Noles RaDocument6 paginiCooper - Formal Review of Karla Noles RaMark CooperÎncă nu există evaluări
- 3 Social Policy and Social Welfare AdministrationDocument284 pagini3 Social Policy and Social Welfare AdministrationJoseph Kennedy100% (5)
- Settlement Geography: Unit No-1&2Document11 paginiSettlement Geography: Unit No-1&2Arindam RoulÎncă nu există evaluări
- Allama Iqbal Open University, Islamabad: (Secondary Teacher Education Department) WarningDocument2 paginiAllama Iqbal Open University, Islamabad: (Secondary Teacher Education Department) WarningAiNa KhanÎncă nu există evaluări
- Hindu Succession-Male & FemaleDocument14 paginiHindu Succession-Male & FemaleKumar MangalamÎncă nu există evaluări
- Enzyme Kinetics Principles and MethodsDocument268 paginiEnzyme Kinetics Principles and MethodsCarlos Carinelli100% (4)
- Dossier 015 enDocument5 paginiDossier 015 enAshok KumarÎncă nu există evaluări
- Iit Delhi Project Scientist Project Associate Posts Advt Details Efa5f6Document1 paginăIit Delhi Project Scientist Project Associate Posts Advt Details Efa5f6SadanandÎncă nu există evaluări
- Essentials of Materials Science and Engineering Si Edition 3rd Edition Askeland Solutions ManualDocument11 paginiEssentials of Materials Science and Engineering Si Edition 3rd Edition Askeland Solutions Manualjeffreyhayesagoisypdfm100% (13)
- E5170s-22 LTE CPE - Quick Start Guide - 01 - English - ErP - C - LDocument24 paginiE5170s-22 LTE CPE - Quick Start Guide - 01 - English - ErP - C - LNelsonÎncă nu există evaluări
- Satellite Motion NotesDocument23 paginiSatellite Motion NotesVarshLok100% (1)
- Architecture As Interface - Healing Architecture For Epatients. In: Healing Architecture. Hrsg. Nickl-Weller. 2013Document6 paginiArchitecture As Interface - Healing Architecture For Epatients. In: Healing Architecture. Hrsg. Nickl-Weller. 2013Asmaa AyadÎncă nu există evaluări
- Case Study of AmoebiasisDocument16 paginiCase Study of AmoebiasisGlorielle ElvambuenaÎncă nu există evaluări
- Libi Vs IACDocument1 paginăLibi Vs IACBingoheartÎncă nu există evaluări
- Learning Module 4 - BARTENDINGDocument34 paginiLearning Module 4 - BARTENDINGivy mae flores67% (3)
- Case of Joneja Bright Steels: The Cash Discount DecisionDocument10 paginiCase of Joneja Bright Steels: The Cash Discount DecisionRHEAÎncă nu există evaluări
- Admission Sos 2013-14090513 PDFDocument21 paginiAdmission Sos 2013-14090513 PDFmanoj31285manojÎncă nu există evaluări
- Name: - Date: - Week/s: - 2 - Topic: Examining Trends and FadsDocument3 paginiName: - Date: - Week/s: - 2 - Topic: Examining Trends and FadsRojelyn Conturno100% (1)
- Jeevan Tara, Sansad Marg NEW DELHI-11001 Regonal Office (North Zone) E MailDocument3 paginiJeevan Tara, Sansad Marg NEW DELHI-11001 Regonal Office (North Zone) E MailGourav SharmaÎncă nu există evaluări
- The Real World An Introduction To Sociology Test Bank SampleDocument28 paginiThe Real World An Introduction To Sociology Test Bank SampleMohamed M YusufÎncă nu există evaluări
- Ap Government Imperial PresidencyDocument2 paginiAp Government Imperial Presidencyapi-234443616Încă nu există evaluări