S-ar putea să vă placă și
- Marching Procedure For Tensegrity 2007Document26 paginiMarching Procedure For Tensegrity 2007Tensegrity WikiÎncă nu există evaluări
- Pinuad Dynamics CRCDocument62 paginiPinuad Dynamics CRCTensegrity WikiÎncă nu există evaluări
- Tensegrity Beam Wave Dynamics 2019Document20 paginiTensegrity Beam Wave Dynamics 2019Tensegrity WikiÎncă nu există evaluări
- Optimal Topology and Geometry For Controllable Tensegrity Systems by Jager, Masic, SkeltonDocument6 paginiOptimal Topology and Geometry For Controllable Tensegrity Systems by Jager, Masic, SkeltonTensegrity WikiÎncă nu există evaluări
- Weiwei FSN CDC42Document6 paginiWeiwei FSN CDC42Tensegrity WikiÎncă nu există evaluări
- Han LMI Struct Linear Cdc03Document6 paginiHan LMI Struct Linear Cdc03Tensegrity WikiÎncă nu există evaluări
- Equilibrium Conditions of A Tensegrity Structure by Williamson, Skelton, Han 2002Document18 paginiEquilibrium Conditions of A Tensegrity Structure by Williamson, Skelton, Han 2002Tensegrity WikiÎncă nu există evaluări
- Intro To Mechanics of Tensegrity StructuresDocument6 paginiIntro To Mechanics of Tensegrity StructuresTensegrity WikiÎncă nu există evaluări
- Stiffness of Planar Tensegrity Truss Topologies by Jager, Skelton 2006Document23 paginiStiffness of Planar Tensegrity Truss Topologies by Jager, Skelton 2006Tensegrity WikiÎncă nu există evaluări
- Structure Optimization Approach For Minimum-Time Reconfiguration of Tensegrity Systems by Aldrich, SkeltonDocument12 paginiStructure Optimization Approach For Minimum-Time Reconfiguration of Tensegrity Systems by Aldrich, SkeltonTensegrity WikiÎncă nu există evaluări
- Tensegrity Airfoils Henrickson, Skelton, Valasek 2016Document25 paginiTensegrity Airfoils Henrickson, Skelton, Valasek 2016Tensegrity WikiÎncă nu există evaluări
- Deployment of A Class 2 Tensegrity Boom by Pinauda, Solaria, SkeltonDocument8 paginiDeployment of A Class 2 Tensegrity Boom by Pinauda, Solaria, SkeltonTensegrity WikiÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- ANSI-SMACNA 2006 HvacDuctStandardsDocument64 paginiANSI-SMACNA 2006 HvacDuctStandardsErica MorrisonÎncă nu există evaluări
- Lab Report 1Document26 paginiLab Report 1ParvinÎncă nu există evaluări
- Thermodynamics MST 2011Document3 paginiThermodynamics MST 2011greenhoochyÎncă nu există evaluări
- Rose Diagrams Intro PDFDocument3 paginiRose Diagrams Intro PDFMahmood MuftiÎncă nu există evaluări
- Buffer SelectionDocument3 paginiBuffer SelectionSandeep KumarÎncă nu există evaluări
- 10aug 2015 VJTIDocument34 pagini10aug 2015 VJTIAyush Saxena100% (1)
- Iso 8528-9Document24 paginiIso 8528-9raffacap50% (2)
- Mixing Time Jet MixerDocument9 paginiMixing Time Jet MixerLTE002Încă nu există evaluări
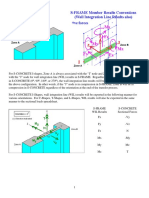
- Wall Integration Conventions S-CONCRETE R11 S-FRAMEDocument3 paginiWall Integration Conventions S-CONCRETE R11 S-FRAMESyed RaziuddinÎncă nu există evaluări
- Altitude Correction FactorsDocument6 paginiAltitude Correction Factorscarlos.calderonÎncă nu există evaluări
- "Fundamentals of College Physics" Third Edition: Dr. Peter J. Nolan, SUNY FarmingdaleDocument15 pagini"Fundamentals of College Physics" Third Edition: Dr. Peter J. Nolan, SUNY Farmingdalehari prasadÎncă nu există evaluări
- Astm F1877 PDFDocument14 paginiAstm F1877 PDFMohdhafizFaiz MdAliÎncă nu există evaluări
- Torque Production in Permanent-MagnetDocument6 paginiTorque Production in Permanent-MagnetTien Dung TranÎncă nu există evaluări
- 8 3 Simplex MethodDocument6 pagini8 3 Simplex MethodARIJIT BRAHMAÎncă nu există evaluări
- Edgar Cayce LibraryDocument7 paginiEdgar Cayce LibrarysnemalecÎncă nu există evaluări
- Ur5 KinematicsDocument12 paginiUr5 KinematicsNikhil GuptaÎncă nu există evaluări
- Lab 1Document25 paginiLab 1Self McÎncă nu există evaluări
- Light and Shadow Quiz NameDocument4 paginiLight and Shadow Quiz Nameapi-490528795100% (1)
- Process Control Servo SystemDocument16 paginiProcess Control Servo SystemCarlos RamirezÎncă nu există evaluări
- Basic Theory Fluidization (Fluidized Bed) ExperimentDocument11 paginiBasic Theory Fluidization (Fluidized Bed) ExperimentMuhammad Reza100% (1)
- DESIGNDocument9 paginiDESIGNRowena Remorosa GalayÎncă nu există evaluări
- Kunii Levenspiel 1991Document6 paginiKunii Levenspiel 1991papapa14Încă nu există evaluări
- Failure Analysis of Malin LandslideDocument16 paginiFailure Analysis of Malin LandslideAnonymous GnfGTwÎncă nu există evaluări
- Abbe Refraktometer Carl Zeiss Jena - Type G 08 PDFDocument8 paginiAbbe Refraktometer Carl Zeiss Jena - Type G 08 PDFrowanrowanÎncă nu există evaluări
- C 297 - C 297M - 04 - Qzi5ny9dmjk3tq - PDFDocument6 paginiC 297 - C 297M - 04 - Qzi5ny9dmjk3tq - PDFAnil100% (1)
- An Introduction To Numerical Methods For The Solutions of Partial Differential EquationsDocument12 paginiAn Introduction To Numerical Methods For The Solutions of Partial Differential EquationseiroÎncă nu există evaluări
- Midas Gen: RC Beam Serviceability Checking ResultDocument2 paginiMidas Gen: RC Beam Serviceability Checking ResultakankwasaÎncă nu există evaluări
- A True Global Presence: Manual ClampingDocument346 paginiA True Global Presence: Manual ClampingIsaías AguilarÎncă nu există evaluări
- Denver, H., 1985 - Settlement Calculation For Footings On SandDocument8 paginiDenver, H., 1985 - Settlement Calculation For Footings On SandbusyspiderÎncă nu există evaluări
- Estimating The Size of Onion Epidermal Cells From Diffraction PatternsDocument5 paginiEstimating The Size of Onion Epidermal Cells From Diffraction PatternsAlexis Nathán RuedaÎncă nu există evaluări