S-ar putea să vă placă și
- Back To Basics Vicor Power Design EbookDocument50 paginiBack To Basics Vicor Power Design Ebookmulleraf100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Evaluare: 2.5 din 5 stele2.5/5 (3)
- Aqw PDFDocument5 paginiAqw PDFnjmnjkÎncă nu există evaluări
- M MM M MMM MMMMMMDocument3 paginiM MM M MMM MMMMMMUvini IndurangaÎncă nu există evaluări
- Grid Station Report of Internship at IESCO: 2.4.1.2.3. Auto TransformersDocument5 paginiGrid Station Report of Internship at IESCO: 2.4.1.2.3. Auto TransformersMuhammad Asif IqbalÎncă nu există evaluări
- Sine Wave Inverter With PICDocument50 paginiSine Wave Inverter With PICmtrapkÎncă nu există evaluări
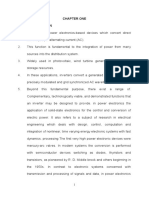
- Chapter One Smps InverterDocument10 paginiChapter One Smps Inverterolawale gbadeboÎncă nu există evaluări
- Logic Design Seminar - Programmable Logic ControllersDocument35 paginiLogic Design Seminar - Programmable Logic Controllersabhisingh28Încă nu există evaluări
- 30W SMPS Design ProjectDocument81 pagini30W SMPS Design ProjectMadham KondaiahÎncă nu există evaluări
- Change Over SwitchDocument3 paginiChange Over SwitchPeter DindahÎncă nu există evaluări
- PC Based Appliances Controller Ag 111508Document8 paginiPC Based Appliances Controller Ag 111508Patel PratikÎncă nu există evaluări
- a15 Design and Implementation of High Accuracy Circuit Breaker for the Protection of LoadsDocument57 paginia15 Design and Implementation of High Accuracy Circuit Breaker for the Protection of Loadssatyajit.dash527Încă nu există evaluări
- Signal Conditioning and Power SuppliesDocument10 paginiSignal Conditioning and Power SuppliesPrashant LochamÎncă nu există evaluări
- Super Fast Circuit BreakerDocument43 paginiSuper Fast Circuit BreakerMuhammad Auwal HajaraÎncă nu există evaluări
- Programmable Logic Controllers - Basic PLC ComponentsDocument2 paginiProgrammable Logic Controllers - Basic PLC ComponentsGalco IndustrialÎncă nu există evaluări
- Energy ManagementDocument55 paginiEnergy ManagementNjitnumÎncă nu există evaluări
- Circuit Breaker: OperationDocument4 paginiCircuit Breaker: OperationDeepak PachauriÎncă nu există evaluări
- Home GRIDDocument5 paginiHome GRIDramoradoÎncă nu există evaluări
- Computer Power Supplies CHT 113Document5 paginiComputer Power Supplies CHT 113PythiusÎncă nu există evaluări
- Rev 1 Module2 PLCDocument293 paginiRev 1 Module2 PLCMuhd IzzatÎncă nu există evaluări
- HFE0809 TutorialDocument2 paginiHFE0809 Tutorialarunkr1Încă nu există evaluări
- WEEK - 5 NotesDocument13 paginiWEEK - 5 Notescharusri74Încă nu există evaluări
- PLC Basics and Voltage Sag Susceptibilities-NEWDocument20 paginiPLC Basics and Voltage Sag Susceptibilities-NEWMouna NjÎncă nu există evaluări
- Introduction To Embedded Systems: What Is Embedded System?Document38 paginiIntroduction To Embedded Systems: What Is Embedded System?DarshanÎncă nu există evaluări
- Over Under Voltage ProtectionDocument49 paginiOver Under Voltage ProtectionChandra Shekhar100% (1)
- PLCDocument34 paginiPLCmurtadhaÎncă nu există evaluări
- Programmable Logic ControlDocument136 paginiProgrammable Logic Controljoshbinmollel112Încă nu există evaluări
- A Project Report On PLC and Its ApplicationDocument27 paginiA Project Report On PLC and Its ApplicationPriyanshu SuryavanshiÎncă nu există evaluări
- Project Report Speed Control of Induction MotorDocument47 paginiProject Report Speed Control of Induction Motorsrajaprojects0% (1)
- Doc of Automatic Load Sharing of TransformersDocument136 paginiDoc of Automatic Load Sharing of TransformersVeda Komakula56% (9)
- Chapter-1: 1.1 Introduction To Embedded SystemsDocument36 paginiChapter-1: 1.1 Introduction To Embedded SystemsphanibhargavÎncă nu există evaluări
- 3731 High Side DriversDocument24 pagini3731 High Side Driversbillium34Încă nu există evaluări
- 6.101 Analog Electronics Final Project Report Variable Power SupplyDocument28 pagini6.101 Analog Electronics Final Project Report Variable Power SupplyDavid PredovanÎncă nu există evaluări
- Development of Single Phase PWM Inverter For Ups ApplicationDocument26 paginiDevelopment of Single Phase PWM Inverter For Ups ApplicationYimy GarciaÎncă nu există evaluări
- A Project Report On Bridge RectifierDocument44 paginiA Project Report On Bridge RectifierTirthankar Mohanty43% (14)
- Transformer Protection, Monitoring and ControlDocument8 paginiTransformer Protection, Monitoring and ControlKARAM ZAKARIAÎncă nu există evaluări
- Protect Power Transformers with PIC MicrocontrollerDocument70 paginiProtect Power Transformers with PIC MicrocontrollerKavuri Sai PradeepÎncă nu există evaluări
- Isolation in Solar Power Converters: Understanding The IEC62109-1 Safety StandardDocument11 paginiIsolation in Solar Power Converters: Understanding The IEC62109-1 Safety StandardIvan Adair Prado JiménezÎncă nu există evaluări
- Isolation 62109Document11 paginiIsolation 62109Shahid KhanÎncă nu există evaluări
- Wireless Biomedical Monitoring SystemDocument81 paginiWireless Biomedical Monitoring SystemAmna AamirÎncă nu există evaluări
- Wireless DC Motor Speed Control System Using IgbtDocument5 paginiWireless DC Motor Speed Control System Using Igbtparasuraman535Încă nu există evaluări
- Phase Shift Full BridgeDocument56 paginiPhase Shift Full BridgegubiliÎncă nu există evaluări
- Over Flux Protection TransformerDocument73 paginiOver Flux Protection TransformerArief HusshanÎncă nu există evaluări
- Electrical Panel Types and FunctionsDocument13 paginiElectrical Panel Types and FunctionsShamim MollaÎncă nu există evaluări
- Convert AC to DC with an efficient SMPS power supply unitDocument4 paginiConvert AC to DC with an efficient SMPS power supply unitOlinad OhcacÎncă nu există evaluări
- Chapter OneDocument28 paginiChapter OneObafemi Samuel0% (1)
- High Efficiency DC-DC Boost Converter Design For LED DrivesDocument10 paginiHigh Efficiency DC-DC Boost Converter Design For LED DriveskowsalyaÎncă nu există evaluări
- Design and Construction of A 60a Automatic Power Changeover System With Electronic SwitchingDocument19 paginiDesign and Construction of A 60a Automatic Power Changeover System With Electronic SwitchingVictor Temitope OwokoleÎncă nu există evaluări
- Power Supply 1Document9 paginiPower Supply 1mohammed almaswaryÎncă nu există evaluări
- CHIPCRAFTFORMATTEDDocument10 paginiCHIPCRAFTFORMATTEDhelloÎncă nu există evaluări
- Project Reprt333Document49 paginiProject Reprt333dhirajsingh_avit83% (6)
- Chapter One - InverterDocument4 paginiChapter One - Inverterkoncypike100% (4)
- Power Supply Unit (Computer) - WikipediaDocument22 paginiPower Supply Unit (Computer) - WikipediaJose ValverdeÎncă nu există evaluări
- Project Report Speed Control of Induction MotorDocument47 paginiProject Report Speed Control of Induction MotorSanjivee SachinÎncă nu există evaluări
- MechanicalDocument5 paginiMechanicalvaneeza ahmedÎncă nu există evaluări
- Modular Battery Charger 2018 1Document8 paginiModular Battery Charger 2018 1Sachin YadavÎncă nu există evaluări
- Microchip 01369ADocument92 paginiMicrochip 01369ACông BìnhÎncă nu există evaluări
- Design and Execution of A DC Source With High Power and High EfficiencyDocument19 paginiDesign and Execution of A DC Source With High Power and High EfficiencyInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Tutorial 1 Sem 1 1516Document2 paginiTutorial 1 Sem 1 1516Sri BathyÎncă nu există evaluări
- Tutorial Chapter 1 (1) E1Document1 paginăTutorial Chapter 1 (1) E1Sri BathyÎncă nu există evaluări
- Western Culture EisDocument4 paginiWestern Culture EisSri BathyÎncă nu există evaluări
- Eeeb273 1213s1 Test2Document10 paginiEeeb273 1213s1 Test2Sri BathyÎncă nu există evaluări
- Assignment E2Document3 paginiAssignment E2Sri BathyÎncă nu există evaluări
- Title: Assignment 4: CGNB 293 StatisticsDocument1 paginăTitle: Assignment 4: CGNB 293 StatisticsSri BathyÎncă nu există evaluări
- Casing & Compressor of Air ConditionerDocument22 paginiCasing & Compressor of Air ConditionerAbdullah Zakirin Abdul 'AzamÎncă nu există evaluări
- Gordon M. Pugh Davidg - RasmussenDocument2 paginiGordon M. Pugh Davidg - RasmussenKuroKy KrausserÎncă nu există evaluări
- Abstract Substructure Conc - Frame Westgate RealDocument4 paginiAbstract Substructure Conc - Frame Westgate RealTashamiswa MajachaniÎncă nu există evaluări
- 3 Spaces Nov 09Document62 pagini3 Spaces Nov 09Somy ElseÎncă nu există evaluări
- IT Act 2000 overview objectives featuresDocument3 paginiIT Act 2000 overview objectives featuresalpanshiÎncă nu există evaluări
- Civilstrips Installation NotesDocument3 paginiCivilstrips Installation NotesKoeswara SofyanÎncă nu există evaluări
- Tecumseh Service Repair Manual VH80 VH100 HH80 HH100 HH120 Oh120 Oh140 Oh160 Oh180 8HP Thru 18HP Cast Iron Engines 691462a PDFDocument78 paginiTecumseh Service Repair Manual VH80 VH100 HH80 HH100 HH120 Oh120 Oh140 Oh160 Oh180 8HP Thru 18HP Cast Iron Engines 691462a PDFDan Clarke75% (4)
- Design of Miniature Maglev Using Hybrid MagnetsDocument4 paginiDesign of Miniature Maglev Using Hybrid MagnetsErmin FazlicÎncă nu există evaluări
- RRB Group DDocument35 paginiRRB Group DRITESH KUMARÎncă nu există evaluări
- Electronics QuestionnaireDocument4 paginiElectronics QuestionnaireRenie FedericoÎncă nu există evaluări
- 0806 02 Los5 - UgDocument124 pagini0806 02 Los5 - Ugbmds kocakÎncă nu există evaluări
- 8 Bit Invaders RulesDocument4 pagini8 Bit Invaders RulesRollo MirfinoÎncă nu există evaluări
- Sparc t8 2 Ds 3864232 PDFDocument6 paginiSparc t8 2 Ds 3864232 PDFanhtuan29Încă nu există evaluări
- FREE UX Books @UXlinksDocument4 paginiFREE UX Books @UXlinksSyaifudin MashuriÎncă nu există evaluări
- BUK9Y53-100B DatasheetDocument12 paginiBUK9Y53-100B Datasheetisomeso21Încă nu există evaluări
- Detail A: STEEL BEAM (300x150x6.5x9)Document1 paginăDetail A: STEEL BEAM (300x150x6.5x9)Aaris AdeÎncă nu există evaluări
- Ansaldo Thomassen - Flexible Service Agreements (2014)Document4 paginiAnsaldo Thomassen - Flexible Service Agreements (2014)guerrezÎncă nu există evaluări
- Critical Reading As ReasoningDocument18 paginiCritical Reading As ReasoningKyle Velasquez100% (3)
- Wulf 2018Document12 paginiWulf 2018Nida iqbalÎncă nu există evaluări
- Sop Flower Arrangement in HotelDocument2 paginiSop Flower Arrangement in HotelwawahalimÎncă nu există evaluări
- Qtiplot Manual enDocument390 paginiQtiplot Manual enjovita georgeÎncă nu există evaluări
- KANSAS CITY Hyatt Regency Hotel Walkways CollapseDocument8 paginiKANSAS CITY Hyatt Regency Hotel Walkways CollapseRafran RoslyÎncă nu există evaluări
- Secure Email Transaction SystemDocument32 paginiSecure Email Transaction SystemGautam Sharma100% (1)
- Din en 1561 - en - 1997-08Document21 paginiDin en 1561 - en - 1997-08AlissonFernandes17Încă nu există evaluări
- DevelopmentThatPays ScrumToScrumban CheatSheet 2 - 0Document1 paginăDevelopmentThatPays ScrumToScrumban CheatSheet 2 - 0tarikÎncă nu există evaluări
- Rfid Based Attendance SystemDocument16 paginiRfid Based Attendance Systemhim chauÎncă nu există evaluări
- Installation - Operation - Maintenance - Instructions - 30 HXC PDFDocument36 paginiInstallation - Operation - Maintenance - Instructions - 30 HXC PDFNurmansyah Dwi Cahyono100% (3)
- Communication in AfricaDocument5 paginiCommunication in AfricaJaque TornneÎncă nu există evaluări
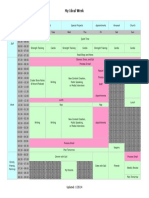
- My Ideal Week PDFDocument1 paginăMy Ideal Week PDFAnonymous QE45TVC9e3Încă nu există evaluări
- Nokia 7368 ISAM ONT G-010G-A For Optical LAN Data Sheet enDocument3 paginiNokia 7368 ISAM ONT G-010G-A For Optical LAN Data Sheet enMirado AndriamihasinoroÎncă nu există evaluări
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeDe la EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeEvaluare: 5 din 5 stele5/5 (8)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDe la EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionEvaluare: 4.5 din 5 stele4.5/5 (542)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsDe la EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsEvaluare: 4 din 5 stele4/5 (1)
- The Rare Metals War: the dark side of clean energy and digital technologiesDe la EverandThe Rare Metals War: the dark side of clean energy and digital technologiesEvaluare: 5 din 5 stele5/5 (2)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingDe la EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingEvaluare: 4 din 5 stele4/5 (1)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemDe la EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemÎncă nu există evaluări
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDe la EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionEvaluare: 4 din 5 stele4/5 (331)
- Understanding Automotive Electronics: An Engineering PerspectiveDe la EverandUnderstanding Automotive Electronics: An Engineering PerspectiveEvaluare: 3.5 din 5 stele3.5/5 (16)
- Introduction to Power System ProtectionDe la EverandIntroduction to Power System ProtectionÎncă nu există evaluări
- 8051 Microcontroller: An Applications Based IntroductionDe la Everand8051 Microcontroller: An Applications Based IntroductionEvaluare: 5 din 5 stele5/5 (6)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesDe la EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesEvaluare: 5 din 5 stele5/5 (1)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsDe la EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsEvaluare: 5 din 5 stele5/5 (2)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowDe la EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowÎncă nu există evaluări
- Current Interruption Transients CalculationDe la EverandCurrent Interruption Transients CalculationEvaluare: 4 din 5 stele4/5 (1)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026De la EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Evaluare: 5 din 5 stele5/5 (1)
- Build Your Own Electric Vehicle, Third EditionDe la EverandBuild Your Own Electric Vehicle, Third EditionEvaluare: 4.5 din 5 stele4.5/5 (3)
- The Graphene Revolution: The Weird Science of the Ultra-thinDe la EverandThe Graphene Revolution: The Weird Science of the Ultra-thinEvaluare: 4.5 din 5 stele4.5/5 (4)
- Beginner's Guide to Reading Schematics, Fourth EditionDe la EverandBeginner's Guide to Reading Schematics, Fourth EditionEvaluare: 3.5 din 5 stele3.5/5 (10)
- Operational Amplifier Circuits: Analysis and DesignDe la EverandOperational Amplifier Circuits: Analysis and DesignEvaluare: 4.5 din 5 stele4.5/5 (2)
- Digital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsDe la EverandDigital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsEvaluare: 5 din 5 stele5/5 (3)
- Electrical Principles and Technology for EngineeringDe la EverandElectrical Principles and Technology for EngineeringEvaluare: 4 din 5 stele4/5 (4)