S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Final Exam:: Saturday, April 21, 2012 4:21 PMDocument16 paginiFinal Exam:: Saturday, April 21, 2012 4:21 PMAustin W80Încă nu există evaluări
- Saturday, April 14, 2012 4:08 PMDocument19 paginiSaturday, April 14, 2012 4:08 PMAustin W80Încă nu există evaluări
- AP Credit MunsterDocument6 paginiAP Credit MunsterAustin W80Încă nu există evaluări
- ME 270 Class Notes - Part 2Document58 paginiME 270 Class Notes - Part 2Austin W80Încă nu există evaluări
- Wednesday, April 25, 2012 10:32 AM: Friday 12/19 1-3pm ELLT 116Document12 paginiWednesday, April 25, 2012 10:32 AM: Friday 12/19 1-3pm ELLT 116Austin W80Încă nu există evaluări
- Sunday, April 15, 2012 9:43 PM: Lec37 Page 1Document20 paginiSunday, April 15, 2012 9:43 PM: Lec37 Page 1Austin W80Încă nu există evaluări
- HW31 Due Today HW32 Due 11/24. No Class Next Week. HW33 Due 12/1Document15 paginiHW31 Due Today HW32 Due 11/24. No Class Next Week. HW33 Due 12/1Austin W80Încă nu există evaluări
- Thursday, March 29, 2012 1:47 PM: Lec31 Page 1Document26 paginiThursday, March 29, 2012 1:47 PM: Lec31 Page 1Austin W80Încă nu există evaluări
- Additional Review Sessions:: Wednesday, April 04, 2012 10:42 AMDocument17 paginiAdditional Review Sessions:: Wednesday, April 04, 2012 10:42 AMAustin W80Încă nu există evaluări
- Regrade Before 11/25.: Thursday, April 12, 2012 1:14 PMDocument19 paginiRegrade Before 11/25.: Thursday, April 12, 2012 1:14 PMAustin W80Încă nu există evaluări
- No Nodal/mesh Analysis For SSS Is Required. - As Far As SSS Is Concerned, in Midterm 3 You Will Mainly See Components in Series/parallelDocument17 paginiNo Nodal/mesh Analysis For SSS Is Required. - As Far As SSS Is Concerned, in Midterm 3 You Will Mainly See Components in Series/parallelAustin W80Încă nu există evaluări
- Time: 11/20 (Thur) 6:30-7:30pm - Coverage: From RLC To The Lecture On Friday (11/14) "Impedance/admittance of 2-Terminal Devices." - Midterm 3Document23 paginiTime: 11/20 (Thur) 6:30-7:30pm - Coverage: From RLC To The Lecture On Friday (11/14) "Impedance/admittance of 2-Terminal Devices." - Midterm 3Austin W80Încă nu există evaluări
- Sunday, April 01, 2012 5:21 PM: Lec32 Page 1Document20 paginiSunday, April 01, 2012 5:21 PM: Lec32 Page 1Austin W80Încă nu există evaluări
- Lec23: Review: Saturday, October 18, 2014 10:21 AMDocument8 paginiLec23: Review: Saturday, October 18, 2014 10:21 AMAustin W80Încă nu există evaluări
- Zero) .: Thursday, March 01, 2012 10:06 AMDocument24 paginiZero) .: Thursday, March 01, 2012 10:06 AMAustin W80Încă nu există evaluări
- ECE 201 Lecture 29Document16 paginiECE 201 Lecture 29Austin W80Încă nu există evaluări
- Short Circuit For Voltage - Open Circuit For Current! - Virtual Short CircuitDocument20 paginiShort Circuit For Voltage - Open Circuit For Current! - Virtual Short CircuitAustin W80Încă nu există evaluări
- Monday, February 13, 2012 2:30 PM: Lec19 Page 1Document29 paginiMonday, February 13, 2012 2:30 PM: Lec19 Page 1Austin W80Încă nu există evaluări
- Sunday, March 18, 2012 2:54 PM: Lec27 Page 1Document18 paginiSunday, March 18, 2012 2:54 PM: Lec27 Page 1Austin W80Încă nu există evaluări
- ECE 201 Lecture 28Document15 paginiECE 201 Lecture 28Austin W80Încă nu există evaluări
- Minimum 28 Maximum 100.00 Average 75.63 Median 76 Standard Deviation 18.27Document27 paginiMinimum 28 Maximum 100.00 Average 75.63 Median 76 Standard Deviation 18.27Austin W80Încă nu există evaluări
- Additional Problems On Blackboard's Homework Folder (Do Not Submit)Document24 paginiAdditional Problems On Blackboard's Homework Folder (Do Not Submit)Austin W80Încă nu există evaluări
- Sunday, February 19, 2012 1:15 PM: Lec18 Page 1Document24 paginiSunday, February 19, 2012 1:15 PM: Lec18 Page 1Austin W80Încă nu există evaluări
- Monday, February 27, 2012 10:59 AM: Lec21 Page 1Document29 paginiMonday, February 27, 2012 10:59 AM: Lec21 Page 1Austin W80Încă nu există evaluări
- TA Photos On Blackboard.: Thursday, February 16, 2012 10:08 AMDocument20 paginiTA Photos On Blackboard.: Thursday, February 16, 2012 10:08 AMAustin W80Încă nu există evaluări
- HW21 and HW22 Due On Wednesday.: Sunday, March 04, 2012 11:47 AMDocument24 paginiHW21 and HW22 Due On Wednesday.: Sunday, March 04, 2012 11:47 AMAustin W80Încă nu există evaluări
- Notes: Tuesday, September 23, 2014 12:08 PMDocument5 paginiNotes: Tuesday, September 23, 2014 12:08 PMAustin W80Încă nu există evaluări
- Bring Survey Regrade Policy:: StatisticsDocument23 paginiBring Survey Regrade Policy:: StatisticsAustin W80Încă nu există evaluări
- Monday, February 06, 2012 2:05 PM: Lec14 Page 1Document16 paginiMonday, February 06, 2012 2:05 PM: Lec14 Page 1Austin W80Încă nu există evaluări
- Monday, February 06, 2012 3:59 PM: Lec16 Page 1Document20 paginiMonday, February 06, 2012 3:59 PM: Lec16 Page 1Austin W80Încă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1091)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Chapter 9 98Document41 paginiChapter 9 98bbsharma11Încă nu există evaluări
- Three-Dimensional Simulation of Cave Initiation, Propagation and Surface Subsidence Using A Coupled Finite Difference-Cellular Automata SolutionDocument16 paginiThree-Dimensional Simulation of Cave Initiation, Propagation and Surface Subsidence Using A Coupled Finite Difference-Cellular Automata SolutionMatías Ignacio Fuentes BustamanteÎncă nu există evaluări
- BS8110 97Document50 paginiBS8110 97mgdarioÎncă nu există evaluări
- Lecture 14Document21 paginiLecture 14Snehal 2003Încă nu există evaluări
- Measurement of Creep Crack Growth Times in Metals: Standard Test Method ForDocument25 paginiMeasurement of Creep Crack Growth Times in Metals: Standard Test Method ForCristian DíazÎncă nu există evaluări
- The Yield Stress MythDocument5 paginiThe Yield Stress MythRavi Kiran TađaþanenǐÎncă nu există evaluări
- Design of Doubly Reinforced BeamsDocument21 paginiDesign of Doubly Reinforced BeamsBhaskar BabiÎncă nu există evaluări
- Measurement of Fracture Toughness: Standard Test Method ForDocument56 paginiMeasurement of Fracture Toughness: Standard Test Method ForAB CabralÎncă nu există evaluări
- Materials Lab 4-ConcreteDocument14 paginiMaterials Lab 4-ConcretemamaduckmasterÎncă nu există evaluări
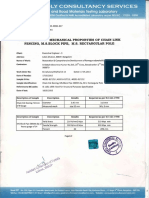
- Test Report of Chain Link FencingDocument2 paginiTest Report of Chain Link Fencingankit67% (3)
- Effect of Defects On Mechanical Properties of 2-D Material: A Project Report Submitted byDocument40 paginiEffect of Defects On Mechanical Properties of 2-D Material: A Project Report Submitted byMukul JoshiÎncă nu există evaluări
- Synopsis MKAJDocument2 paginiSynopsis MKAJRenukadevi RptÎncă nu există evaluări
- Shear Force and Bending Moment (Q and A)Document15 paginiShear Force and Bending Moment (Q and A)IdinÎncă nu există evaluări
- Yara BambaDocument3 paginiYara BambaMario CusitauÎncă nu există evaluări
- Assignment Question DOS 2 Unit-IDocument4 paginiAssignment Question DOS 2 Unit-IPriya PriyaÎncă nu există evaluări
- Displacements and Stresses Due To A Vertical Point Load in An Inhomogeneous Transversely Isotropic Half-SpaceDocument19 paginiDisplacements and Stresses Due To A Vertical Point Load in An Inhomogeneous Transversely Isotropic Half-SpaceHuy Hiep NguyenÎncă nu există evaluări
- 01-Overviewce FORMATION ITech Code Aster PDFDocument62 pagini01-Overviewce FORMATION ITech Code Aster PDFJoe PanzerÎncă nu există evaluări
- Gravity Retaining WallDocument5 paginiGravity Retaining WallAlwin SolemanÎncă nu există evaluări
- Reinforced Concrete Analysis and DesignDocument556 paginiReinforced Concrete Analysis and Designviraj100% (2)
- Pile Cap DesignDocument13 paginiPile Cap DesignWahid wrbelÎncă nu există evaluări
- 18-1039 Draft Report (Nuberg Engg.) Complete PDFDocument73 pagini18-1039 Draft Report (Nuberg Engg.) Complete PDFYatendra TyagiÎncă nu există evaluări
- Shear StrengthDocument17 paginiShear StrengthVon San Jose100% (1)
- Department of Education: Republic of The PhilippinesDocument2 paginiDepartment of Education: Republic of The PhilippinesChimmy ChangaÎncă nu există evaluări
- Displacement-Based Method of Analysis For Regular Reinforced-Concrete Wall Buildings: Application To A Full-Scale 7-Story Building Slice Tested at UC-San DiegoDocument14 paginiDisplacement-Based Method of Analysis For Regular Reinforced-Concrete Wall Buildings: Application To A Full-Scale 7-Story Building Slice Tested at UC-San Diegojoelmt30Încă nu există evaluări
- Direct Shear Test Aim of The ExperimentDocument4 paginiDirect Shear Test Aim of The ExperimentrajpceÎncă nu există evaluări
- CH 15Document31 paginiCH 15Mohammad KarimiÎncă nu există evaluări
- Time Dependent Analysis in SAP2000Document7 paginiTime Dependent Analysis in SAP2000Reynaldo Valdez HerreraÎncă nu există evaluări
- EMI 2015 Final ProgramDocument14 paginiEMI 2015 Final ProgramMayank AjugiaÎncă nu există evaluări
- Lecture Strength - Part 2 - Simple StrainDocument10 paginiLecture Strength - Part 2 - Simple StrainLopez ReyÎncă nu există evaluări
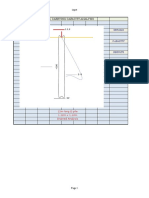
- PILES CARRYING CAPACITY ANALYSIS SoftwareDocument7 paginiPILES CARRYING CAPACITY ANALYSIS SoftwareJhon Anaya VerdeÎncă nu există evaluări