S-ar putea să vă placă și
- 10 Viscoelasticity 03 RheologicalDocument13 pagini10 Viscoelasticity 03 RheologicalAvinash KawaleÎncă nu există evaluări
- 10 Viscoelasticity 03 RheologicalDocument10 pagini10 Viscoelasticity 03 RheologicalJuan Pablo EspinosaÎncă nu există evaluări
- 10 Viscoelasticity 03 RheologicalDocument13 pagini10 Viscoelasticity 03 RheologicalSaif LlÎncă nu există evaluări
- Viscoelastic Behavior of Polymers PDFDocument9 paginiViscoelastic Behavior of Polymers PDFchiuchan888Încă nu există evaluări
- Chap. 6 MSMBM Design Sem IDocument95 paginiChap. 6 MSMBM Design Sem IPrafulla PatilÎncă nu există evaluări
- Rheological ModelsDocument14 paginiRheological ModelsCHEENIE MAE SAGUNÎncă nu există evaluări
- 10 Viscoelasticity 04 Hereditaory PDFDocument12 pagini10 Viscoelasticity 04 Hereditaory PDFletter_ashish4444Încă nu există evaluări
- ViscoelasticityDocument11 paginiViscoelasticitymchilwesaÎncă nu există evaluări
- Tschoegl1989 Chapter EnergyStorageAndDissipationInADocument46 paginiTschoegl1989 Chapter EnergyStorageAndDissipationInAchopin.wlive.cnÎncă nu există evaluări
- Dynamics of Structures and Soils: Deterministic Structural Dynamics. Random Stochastic or Random Structural DynamicsDocument11 paginiDynamics of Structures and Soils: Deterministic Structural Dynamics. Random Stochastic or Random Structural Dynamicspanos2244662864Încă nu există evaluări
- 15 ViscoelasticityDocument30 pagini15 ViscoelasticityaderancÎncă nu există evaluări
- Lecture 20Document14 paginiLecture 20Martha Isabel SernaÎncă nu există evaluări
- Tensors, Stress, Strain, ElasticityDocument10 paginiTensors, Stress, Strain, ElasticitySiti Cweety MarryÎncă nu există evaluări
- Theories of Elastic FailureDocument15 paginiTheories of Elastic FailurejaishowÎncă nu există evaluări
- CH 10Document36 paginiCH 10LeonardoMadeira11100% (1)
- Maxwell ModelDocument20 paginiMaxwell ModelJasleen Kaur HoraÎncă nu există evaluări
- Eyring Equation PDFDocument7 paginiEyring Equation PDFRana AnasÎncă nu există evaluări
- Hysteretic Damping and ModelsDocument12 paginiHysteretic Damping and ModelsnoussnoussaÎncă nu există evaluări
- Creep DescriptionDocument11 paginiCreep DescriptionGerry AnandaÎncă nu există evaluări
- Drying Creep of Concrete in Terms of Age-Adjusted Effective Modulus MethodDocument12 paginiDrying Creep of Concrete in Terms of Age-Adjusted Effective Modulus MethodDaniela Mihaiela BocaÎncă nu există evaluări
- Generalized Maxwell ModelDocument10 paginiGeneralized Maxwell Modelsalkan_rahmanovic810Încă nu există evaluări
- Columns & Struts NotesDocument17 paginiColumns & Struts NotesGurpreet SinghÎncă nu există evaluări
- Deformation, Stress, and Conservation Laws: I U U XDocument31 paginiDeformation, Stress, and Conservation Laws: I U U XFelipe Carrasco DuránÎncă nu există evaluări
- Articulo - Pendulo SimpleDocument10 paginiArticulo - Pendulo SimpleeulalioaguilarÎncă nu există evaluări
- Introducton To ThermodynamicsDocument7 paginiIntroducton To Thermodynamicsdesi_parisÎncă nu există evaluări
- Viscoelasticity: ReferencesDocument21 paginiViscoelasticity: Referencesletter_ashish4444Încă nu există evaluări
- Vectors & TensorsDocument5 paginiVectors & TensorsAryce_Încă nu există evaluări
- Experiment # 1: ObjectiveDocument5 paginiExperiment # 1: ObjectiveHurair Tariq FOE-PermanentÎncă nu există evaluări
- Elastic Stability of ColumnsDocument11 paginiElastic Stability of ColumnsSayantan GhosalÎncă nu există evaluări
- Stability of StructuresDocument83 paginiStability of StructuresmchilwesaÎncă nu există evaluări
- Polymer Mass: Principles of Product DesignDocument27 paginiPolymer Mass: Principles of Product DesignOladimeji AlabiÎncă nu există evaluări
- Beam DeflectionDocument14 paginiBeam DeflectionPrudvi Krishna MaladiÎncă nu există evaluări
- TP N°2 - Extracto CEB-FIP Model Code 1990Document6 paginiTP N°2 - Extracto CEB-FIP Model Code 1990rlorefice6559Încă nu există evaluări
- Free Vibration of ParticlesDocument19 paginiFree Vibration of ParticlesDavid AmachreeÎncă nu există evaluări
- Sujets Physique SIS09 enDocument6 paginiSujets Physique SIS09 enKlevis KasoÎncă nu există evaluări
- A Stress Relaxation Model For The Viscoelastic Solids Based On The Steady-State Creep EquationDocument11 paginiA Stress Relaxation Model For The Viscoelastic Solids Based On The Steady-State Creep EquationNam Huu TranÎncă nu există evaluări
- 34 3 RSTD MotnDocument9 pagini34 3 RSTD MotnEbookcrazeÎncă nu există evaluări
- Reference BooksDocument23 paginiReference BooksIgor Gabriel Teixeira GómezÎncă nu există evaluări
- CH10Document39 paginiCH10Ajay Kumar SreeramaÎncă nu există evaluări
- Couette FlowDocument5 paginiCouette Flowphutd09100% (1)
- The Wave EquationDocument34 paginiThe Wave EquationStephanie HaynesÎncă nu există evaluări
- Chapter 8. Entropy: P P M ADocument6 paginiChapter 8. Entropy: P P M AmarzinusÎncă nu există evaluări
- Mechanics 3 Revision NotesDocument45 paginiMechanics 3 Revision NotesDexter FungÎncă nu există evaluări
- MIT2 080JF13 Lecture10Document16 paginiMIT2 080JF13 Lecture10LeonardoMadeira11Încă nu există evaluări
- M Aterial Subjected To Combine D Direct and Shear StressesDocument4 paginiM Aterial Subjected To Combine D Direct and Shear Stressespmm05479Încă nu există evaluări
- Design of Diagonal Cross Bracings - Part 1 Theoretical Study PDFDocument5 paginiDesign of Diagonal Cross Bracings - Part 1 Theoretical Study PDFaapennsylvaniaÎncă nu există evaluări
- Creep 2Document28 paginiCreep 2Abdul RahimÎncă nu există evaluări
- 5.6 Unforced Mechanical Vibrations: Simple Harmonic MotionDocument8 pagini5.6 Unforced Mechanical Vibrations: Simple Harmonic MotionHaridev MoorthyÎncă nu există evaluări
- Redifined Approach For The Modeling of Sky DivingDocument14 paginiRedifined Approach For The Modeling of Sky Divingvarun varma100% (1)
- Subject: Arch315-Strength of MaterialsDocument15 paginiSubject: Arch315-Strength of MaterialsAlyssa MadelÎncă nu există evaluări
- Notes On Mechanical Vibrations: 1 Masses and Springs-The Linear OscillatorDocument10 paginiNotes On Mechanical Vibrations: 1 Masses and Springs-The Linear Oscillatoramlandas08Încă nu există evaluări
- Applications of Second ODEDocument24 paginiApplications of Second ODEMuhammad Zariff 'Izzat Mohd Faudzi100% (1)
- Townsend, Quantum Physics, CHAP - 3, Schodinger EqDocument24 paginiTownsend, Quantum Physics, CHAP - 3, Schodinger EqElcan DiogenesÎncă nu există evaluări
- Beams and Framed Structures: Structures and Solid Body MechanicsDe la EverandBeams and Framed Structures: Structures and Solid Body MechanicsEvaluare: 3 din 5 stele3/5 (2)
- Heat: The Nature of Temperature and Most Other PhysicsDe la EverandHeat: The Nature of Temperature and Most Other PhysicsÎncă nu există evaluări
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsDe la EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsÎncă nu există evaluări
- A Complete Course in Physics ( Graphs ) - First EditionDe la EverandA Complete Course in Physics ( Graphs ) - First EditionÎncă nu există evaluări
- 3-Axially Loaded Compresion Members PDFDocument37 pagini3-Axially Loaded Compresion Members PDFKellen BrumbaughÎncă nu există evaluări
- Selling Your Contents To The WorldDocument25 paginiSelling Your Contents To The WorldCreative Malaysia100% (1)
- Chemical Thermodynamics: Theodore L. Brown H. Eugene Lemay, Jr. and Bruce E. BurstenDocument43 paginiChemical Thermodynamics: Theodore L. Brown H. Eugene Lemay, Jr. and Bruce E. BurstenChery-an PletÎncă nu există evaluări
- Manual PC Soundcard Scope 1.4.5Document17 paginiManual PC Soundcard Scope 1.4.5NatashaKillerÎncă nu există evaluări
- Solar Pond - Awesome PDFDocument26 paginiSolar Pond - Awesome PDFKartik MahajanÎncă nu există evaluări
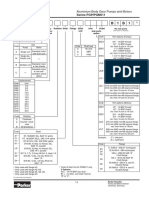
- PG 511 B 1 B 1: Ordering Code Series PGP/PGM511Document7 paginiPG 511 B 1 B 1: Ordering Code Series PGP/PGM511Four SticksÎncă nu există evaluări
- A9K CatalogueDocument152 paginiA9K CatalogueMohamed SaffiqÎncă nu există evaluări
- Apqp - DR SHFTDocument60 paginiApqp - DR SHFTrajesh5000100% (2)
- Estimate SR 14-15 02 KHANDEKARDocument5 paginiEstimate SR 14-15 02 KHANDEKARAkshay SavvasheriÎncă nu există evaluări
- Teaching Finite Element Analysis For Design Engineers: August 2011Document7 paginiTeaching Finite Element Analysis For Design Engineers: August 2011Nelu CheluÎncă nu există evaluări
- Schematic Lenovo ThinkPad T410 NOZOMI-1Document99 paginiSchematic Lenovo ThinkPad T410 NOZOMI-1borneocampÎncă nu există evaluări
- Glass Inspection CriteriaDocument4 paginiGlass Inspection CriteriabatteekhÎncă nu există evaluări
- Pioneer XDP - 30R ManualDocument213 paginiPioneer XDP - 30R Manualmugurel_stanescuÎncă nu există evaluări
- CovestroDocument2 paginiCovestroRonaldo CamargoÎncă nu există evaluări
- Project AgreementDocument6 paginiProject AgreementRowin DizonÎncă nu există evaluări
- SdccmanDocument126 paginiSdccmanGustavo A. Sarache MillanÎncă nu există evaluări
- Ofdma: LTE Air Interface CourseDocument63 paginiOfdma: LTE Air Interface CourseAkhtar KhanÎncă nu există evaluări
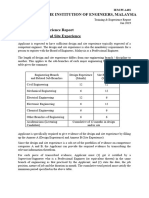
- IEM PI A401 - ANNEXE - Design & Site ExperienceDocument5 paginiIEM PI A401 - ANNEXE - Design & Site ExperienceapiplajengilaÎncă nu există evaluări
- Understanding Low Voltage Power Distribution SystemsDocument64 paginiUnderstanding Low Voltage Power Distribution SystemsJorge Luis Mallqui Barbaran100% (1)
- HiraDocument30 paginiHiravijay kumar singhÎncă nu există evaluări
- D 2510 - 94 R98Document3 paginiD 2510 - 94 R98David Cazorla100% (1)
- UMTS AircomDocument20 paginiUMTS AircomDũng PhạmÎncă nu există evaluări
- RT L2 General Examination PaperDocument4 paginiRT L2 General Examination PaperdaddadÎncă nu există evaluări
- Stock # Carbon Weight Burn Temp Puncture StrengthDocument8 paginiStock # Carbon Weight Burn Temp Puncture StrengthMintÎncă nu există evaluări
- Wiring Color and Pin-Out Schematic Electronic Vessel Control EVC - C, D4/D6-DPH/DPRDocument2 paginiWiring Color and Pin-Out Schematic Electronic Vessel Control EVC - C, D4/D6-DPH/DPRSivan Raj50% (2)
- Ammonia Production From Natural Gas-Haldor Topsoe ProcessDocument22 paginiAmmonia Production From Natural Gas-Haldor Topsoe ProcessYash BhimaniÎncă nu există evaluări
- Car DeerDocument2 paginiCar DeerNEGameandParksÎncă nu există evaluări
- Asme Wec Chapter Annual ReportDocument12 paginiAsme Wec Chapter Annual ReportManazar HussainÎncă nu există evaluări
- Portal Info StubDocument11 paginiPortal Info Stubzamanqomaru8Încă nu există evaluări