S-ar putea să vă placă și
- Ethernet Fault Tolerance and RedundancyDocument9 paginiEthernet Fault Tolerance and RedundancysjpritchardÎncă nu există evaluări
- Tms 320 DM 6467Document355 paginiTms 320 DM 6467sjpritchardÎncă nu există evaluări
- An 347Document8 paginiAn 347sjpritchardÎncă nu există evaluări
- FPGA Implementation of A Multimode TransmultiplexerDocument63 paginiFPGA Implementation of A Multimode TransmultiplexersjpritchardÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
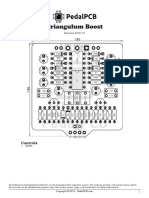
- PedalPCB TriangulumDocument5 paginiPedalPCB TriangulumYann RossiÎncă nu există evaluări
- V I V A: Example 5.5: - SolutionDocument15 paginiV I V A: Example 5.5: - SolutionqureshiÎncă nu există evaluări
- 1.5 A Adjustable Output, Positive Voltage Regulator LM317: ON SemiconductorDocument1 pagină1.5 A Adjustable Output, Positive Voltage Regulator LM317: ON SemiconductorGabriel EisenachÎncă nu există evaluări
- LSDocument8 paginiLSBrzata Ptica100% (1)
- BA5927SDocument10 paginiBA5927SHugo VelozÎncă nu există evaluări
- Lecture by Navakanta BhattDocument33 paginiLecture by Navakanta BhattVivek RoyÎncă nu există evaluări
- Alarm Clock Using VerilogDocument5 paginiAlarm Clock Using VerilogRadhikaÎncă nu există evaluări
- Serial Port InterfacingDocument5 paginiSerial Port Interfacingyampire100% (1)
- Ca 3161Document4 paginiCa 3161api-3747180Încă nu există evaluări
- Unit09.programmable Logic Devices EnglishDocument20 paginiUnit09.programmable Logic Devices EnglishRufo LemurÎncă nu există evaluări
- 74HC/HCT245: Octal Bus Transceiver 3-StateDocument7 pagini74HC/HCT245: Octal Bus Transceiver 3-StateYacine AlgersÎncă nu există evaluări
- CodeDocument3 paginiCodesagarscorpionÎncă nu există evaluări
- Setting Up A Fiber Optic Digital LinkDocument5 paginiSetting Up A Fiber Optic Digital LinkDayanand Gowda Kr100% (1)
- Bang Gia LK (1) - DTDocument22 paginiBang Gia LK (1) - DTTri Nang HuynhÎncă nu există evaluări
- PW 2 Dee20033 Sesi 2 2022 2023 F2FDocument7 paginiPW 2 Dee20033 Sesi 2 2022 2023 F2FAkmal GaffarÎncă nu există evaluări
- SN8P27143 V14 en PDFDocument130 paginiSN8P27143 V14 en PDFjuan echeverryÎncă nu există evaluări
- Balun DesignDocument6 paginiBalun DesignYouli TianÎncă nu există evaluări
- EDC Important QuestionsDocument2 paginiEDC Important QuestionsManjula KunduruÎncă nu există evaluări
- Electric Druid Noise Generator: Introduction! 1 Pinout Diagram! 2 Problems Programming The Chip?! 2 Application Notes! 2Document4 paginiElectric Druid Noise Generator: Introduction! 1 Pinout Diagram! 2 Problems Programming The Chip?! 2 Application Notes! 2conrad blacksmithÎncă nu există evaluări
- Chapter 16 PSK DemodDocument18 paginiChapter 16 PSK DemodberkahÎncă nu există evaluări
- 4.DC1 Biasing - BJTsDocument48 pagini4.DC1 Biasing - BJTsFaisal AftabÎncă nu există evaluări
- Crawford MOSFET in Circuit Design 1967Document162 paginiCrawford MOSFET in Circuit Design 1967Nikolas AugustoÎncă nu există evaluări
- Physics M. Palanichamy : Part-I: Answer All The QuestionsDocument3 paginiPhysics M. Palanichamy : Part-I: Answer All The QuestionsphysicspalanichamyÎncă nu există evaluări
- 7447 - BCD To 7-Segment Decoder/Driver WithDocument3 pagini7447 - BCD To 7-Segment Decoder/Driver Withthuytrieuden28742100% (1)
- Siemens A56Document45 paginiSiemens A56carlcoxÎncă nu există evaluări
- Lecture Notes On Flip FlopsDocument5 paginiLecture Notes On Flip Flopsraul gironellaÎncă nu există evaluări
- A 5.8-Ghz High Efficient, Low Power, Low Phase Noise Cmos Vco For Ieee 802.11ADocument4 paginiA 5.8-Ghz High Efficient, Low Power, Low Phase Noise Cmos Vco For Ieee 802.11ARitika SinghÎncă nu există evaluări
- DM74LS193 Synchronous 4-Bit Binary Counter With Dual Clock: General DescriptionDocument7 paginiDM74LS193 Synchronous 4-Bit Binary Counter With Dual Clock: General DescriptionJonathan Vila PalaciosÎncă nu există evaluări
- DSA91000 E-Series ManualDocument32 paginiDSA91000 E-Series Manualabdullahnisar92Încă nu există evaluări
- 4 Ece - 15.4.13 (Mod)Document2 pagini4 Ece - 15.4.13 (Mod)BIBIN CHIDAMBARANATHANÎncă nu există evaluări