S-ar putea să vă placă și
- D-Pb-Zaap-C-X-001 (RD)Document1 paginăD-Pb-Zaap-C-X-001 (RD)Mauricio SanchezÎncă nu există evaluări
- Energía Potencial y Conservación de La EnergíaDocument9 paginiEnergía Potencial y Conservación de La EnergíaGabriel Leon BenavidesÎncă nu există evaluări
- Comportamiento. Efectos DiferencialesDocument78 paginiComportamiento. Efectos DiferencialesJosescribd91Încă nu există evaluări
- Curvatura de Una Columna y Su DeterminaciónDocument3 paginiCurvatura de Una Columna y Su DeterminaciónFredy LópezÎncă nu există evaluări
- Teorema de Bloch. Masa Efectiva. Densidad de Estados. Método LCAO. Método K P.Document26 paginiTeorema de Bloch. Masa Efectiva. Densidad de Estados. Método LCAO. Método K P.Isabel100% (3)
- Física Aplicada A La AnestesiaDocument1 paginăFísica Aplicada A La AnestesiaJonathan AguilarÎncă nu există evaluări
- FIBRO 08 Muelles HelicoidalesDocument45 paginiFIBRO 08 Muelles HelicoidalesDaniel Cardona MuñozÎncă nu există evaluări
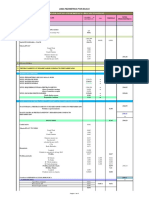
- Presupuestos Sistemas de Riego 2019 IIDocument26 paginiPresupuestos Sistemas de Riego 2019 IIOscar Jose Abanto PerezÎncă nu există evaluări
- Ficha Tecnica y Modelos - Bombas de Ariete - Ecoaguas PanamaDocument7 paginiFicha Tecnica y Modelos - Bombas de Ariete - Ecoaguas PanamaLuis JaebÎncă nu există evaluări
- Avance #5 - Modelación de Ensayo Triaxial CIU en PLAXISDocument23 paginiAvance #5 - Modelación de Ensayo Triaxial CIU en PLAXISPablo Andres Seitz CastroÎncă nu există evaluări
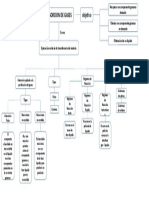
- Mapa Conceptual de Absorcion de GasesDocument1 paginăMapa Conceptual de Absorcion de GasesCarmen Roxana Quispe CastilloÎncă nu există evaluări
- Línea Piezométrica-PTAR BOJACA.02Document5 paginiLínea Piezométrica-PTAR BOJACA.02Edward CadavidÎncă nu există evaluări
- Supexc Mix Beretta PDFDocument39 paginiSupexc Mix Beretta PDFerlin2Încă nu există evaluări
- Fuerzas Sobre Superficies Curvas SumergidasDocument8 paginiFuerzas Sobre Superficies Curvas SumergidasKathia Gabriela43% (7)
- Folleto Paneles Evaporativos v1.0Document4 paginiFolleto Paneles Evaporativos v1.0Walter naspiranÎncă nu există evaluări
- Diseño de Vigas Doblemente ReforzadasDocument4 paginiDiseño de Vigas Doblemente ReforzadasernestoÎncă nu există evaluări
- Guia de Trabajo N°3 TermodinamicaDocument5 paginiGuia de Trabajo N°3 TermodinamicaAndrea Angarita HernándezÎncă nu există evaluări
- Estática de Fluidos - MAR DE PONIENTEDocument10 paginiEstática de Fluidos - MAR DE PONIENTEAntonio BatistaÎncă nu există evaluări
- Guia de Fisica No. 4 - 11° AgostoDocument2 paginiGuia de Fisica No. 4 - 11° AgostoAndrés CuelloÎncă nu există evaluări
- Herramientas y EquiposDocument17 paginiHerramientas y EquiposJonathan Emanuel Torres BrionesÎncă nu există evaluări
- Manual de Operaciones Planta Concentradora Flotación - TECSUPDocument34 paginiManual de Operaciones Planta Concentradora Flotación - TECSUPAntonio HUAYHUA ROJAS100% (2)
- Procedimiento de Diseño, Seleccion y Evalucion de Compresores CentrifugosDocument146 paginiProcedimiento de Diseño, Seleccion y Evalucion de Compresores CentrifugosJose Luis Velasquez CeronÎncă nu există evaluări
- Dpi Estimacion de Costos de Inversion EjerciciosDocument28 paginiDpi Estimacion de Costos de Inversion EjerciciosEnrique Fernando Llaza TomayaÎncă nu există evaluări
- Taller 1 Dinamica EstructuralDocument15 paginiTaller 1 Dinamica EstructuralCheLo LuisÎncă nu există evaluări
- Informe-Extractor de OloresDocument10 paginiInforme-Extractor de OloresDENIS UGEÑOÎncă nu există evaluări
- DOCUMENTO DE ESTUDIO No. 8. FRACCION DISOCIADA DE SISTEMAS ACIDO-BASE MONO Y POLIPROTICOS LOGO UADocument20 paginiDOCUMENTO DE ESTUDIO No. 8. FRACCION DISOCIADA DE SISTEMAS ACIDO-BASE MONO Y POLIPROTICOS LOGO UAKevinVivarezÎncă nu există evaluări
- ENi CIDocument1 paginăENi CIeeindustrialÎncă nu există evaluări
- Codigo de Latex para Practicas de LaboratorioDocument10 paginiCodigo de Latex para Practicas de LaboratorioMiguel AngelÎncă nu există evaluări
- Q2 PAU EstructuraAtómicaClasificacionPeriódicaElementosDocument6 paginiQ2 PAU EstructuraAtómicaClasificacionPeriódicaElementosMaria Jose MplineroÎncă nu există evaluări
- CC - NN 9no Actividad #2 NivelaciónDocument9 paginiCC - NN 9no Actividad #2 NivelaciónVanessa La SernaÎncă nu există evaluări