S-ar putea să vă placă și
- Computational Methods for Nonlinear Dynamical Systems: Theory and Applications in Aerospace EngineeringDe la EverandComputational Methods for Nonlinear Dynamical Systems: Theory and Applications in Aerospace EngineeringÎncă nu există evaluări
- The Langevin and Generalised Langevin Approach to the Dynamics of Atomic, Polymeric and Colloidal SystemsDe la EverandThe Langevin and Generalised Langevin Approach to the Dynamics of Atomic, Polymeric and Colloidal SystemsÎncă nu există evaluări
- David Soloveichik - Robust Stochastic Chemical Reaction Networks and Bounded Tau-LeapingDocument29 paginiDavid Soloveichik - Robust Stochastic Chemical Reaction Networks and Bounded Tau-LeapingCogsmsÎncă nu există evaluări
- Chun 2000Document26 paginiChun 2000h.sinner671Încă nu există evaluări
- Entropy 19 00425 v2Document22 paginiEntropy 19 00425 v2Oleg NikitinÎncă nu există evaluări
- Coarse-Graining Large Biomolecular SystemsDocument2 paginiCoarse-Graining Large Biomolecular SystemsHumair ShaheenÎncă nu există evaluări
- Designing stable observers for LTI systems and Lipschitz systems with bounded nonlinearitiesDocument12 paginiDesigning stable observers for LTI systems and Lipschitz systems with bounded nonlinearitiesPanagiotis PapageorgiouÎncă nu există evaluări
- Computational Approaches For Modeling ReguComputational Approaches For Modeling Regulatory Cellular Networkslatory Cellular NetworksDocument9 paginiComputational Approaches For Modeling ReguComputational Approaches For Modeling Regulatory Cellular Networkslatory Cellular NetworksJuan ManuelÎncă nu există evaluări
- UntitledDocument11 paginiUntitledhihiÎncă nu există evaluări
- Andreas M. Lauchli - Numerical Simulations of Frustrated SystemsDocument34 paginiAndreas M. Lauchli - Numerical Simulations of Frustrated SystemsImaxSWÎncă nu există evaluări
- Storace (2004) - Piecewise-Linear Approximation of Nonlinear Dynamical SystemsDocument13 paginiStorace (2004) - Piecewise-Linear Approximation of Nonlinear Dynamical SystemsSohibul HajahÎncă nu există evaluări
- Statistical Inference of The Time-Varying Structure of Gene-Regulation NetworksDocument16 paginiStatistical Inference of The Time-Varying Structure of Gene-Regulation NetworksRochmat HimawanÎncă nu există evaluări
- Optimized Forest-Ruth- and Suzuki-like algorithms for integration of motionDocument15 paginiOptimized Forest-Ruth- and Suzuki-like algorithms for integration of motionvicente aranguizÎncă nu există evaluări
- P.C. Bressloff and S. Coombes - Symmetry and Phase-Locking in A Ring of Pulse-Coupled Oscillators With Distributed DelaysDocument24 paginiP.C. Bressloff and S. Coombes - Symmetry and Phase-Locking in A Ring of Pulse-Coupled Oscillators With Distributed DelaysNeerFamÎncă nu există evaluări
- Stochastic Variational Approach To Quantum-Mechanical Few-Body Problems PDFDocument304 paginiStochastic Variational Approach To Quantum-Mechanical Few-Body Problems PDFGuilherme Morais100% (1)
- Approximate Accelerated Stochastic Simulation of Chemically Reacting SystemsDocument18 paginiApproximate Accelerated Stochastic Simulation of Chemically Reacting SystemsNiaÎncă nu există evaluări
- Process Analysis: Lecture 7: Models and Their ClassificationDocument8 paginiProcess Analysis: Lecture 7: Models and Their ClassificationDheeraj ShuklaÎncă nu există evaluări
- TMP ADF8Document14 paginiTMP ADF8FrontiersÎncă nu există evaluări
- Laurence E. Fried and Gregory S. Ezra - PERTURB: A Special-Purpose Algebraic Manipulation Program For Classical Perturbation TheoryDocument15 paginiLaurence E. Fried and Gregory S. Ezra - PERTURB: A Special-Purpose Algebraic Manipulation Program For Classical Perturbation TheoryOmasazzÎncă nu există evaluări
- Stefane@it Uu SeDocument27 paginiStefane@it Uu SeRochak JainÎncă nu există evaluări
- Chebbi_16559Document28 paginiChebbi_16559acarrascotaberaÎncă nu există evaluări
- 1.1 Background and MotivationDocument36 pagini1.1 Background and MotivationZainab Minhas RajpootÎncă nu există evaluări
- Chapter 2Document72 paginiChapter 2Seun Sam AdetolaÎncă nu există evaluări
- Modeling and Simulating Chemical Reactions: 1 MotivationDocument31 paginiModeling and Simulating Chemical Reactions: 1 MotivationakumcÎncă nu există evaluări
- ATOMIZAÇÃO phd8Document9 paginiATOMIZAÇÃO phd8eustaccoÎncă nu există evaluări
- 1995 Grassia Et Al. BrownianDocument31 pagini1995 Grassia Et Al. BrownianTanvir HossainÎncă nu există evaluări
- 1 s2.0 S0006349511022739 MainDocument1 pagină1 s2.0 S0006349511022739 Mainrully1234Încă nu există evaluări
- Andrew K. Henrick, Tariq D. Aslam and Joseph M. Powers - Simulations of Pulsating One-Dimensional Detonations With True Fifth Order AccuracyDocument19 paginiAndrew K. Henrick, Tariq D. Aslam and Joseph M. Powers - Simulations of Pulsating One-Dimensional Detonations With True Fifth Order AccuracyNikeShoxxxÎncă nu există evaluări
- Recursive and Residual Algorithms For The Efficient Numerical Integration of Multi-Body SystemsDocument31 paginiRecursive and Residual Algorithms For The Efficient Numerical Integration of Multi-Body SystemsCleves AxiomaÎncă nu există evaluări
- TSP Cmes 41283Document25 paginiTSP Cmes 41283ranim najibÎncă nu există evaluări
- Surrogate Models For Oscillatory Systems Using Sparse Polynomial Chaos Expansions and Stochastic Time WarpingDocument45 paginiSurrogate Models For Oscillatory Systems Using Sparse Polynomial Chaos Expansions and Stochastic Time Warpingpatricia.santanareyesÎncă nu există evaluări
- Multi-Reservoir Operation Rules Multi-SwDocument21 paginiMulti-Reservoir Operation Rules Multi-SwdjajadjajaÎncă nu există evaluări
- Nonlinear PDE Asymptotic BehaviorDocument11 paginiNonlinear PDE Asymptotic BehaviorMohammed NasrÎncă nu există evaluări
- Biochemical Systems Theory A ReviewDocument53 paginiBiochemical Systems Theory A Reviewpanithisart.sÎncă nu există evaluări
- Neeves (2016) - Mathematical Models of HemostasisDocument18 paginiNeeves (2016) - Mathematical Models of HemostasisVint PineÎncă nu există evaluări
- Libro 1Document200 paginiLibro 1Guillermo Angulo NiquenÎncă nu există evaluări
- System Modelling & Simulation of Energy SystemsDocument35 paginiSystem Modelling & Simulation of Energy SystemsH.J.PrabhuÎncă nu există evaluări
- Modeling Cellular Signaling Systems: An Abstraction-Refinement ApproachDocument5 paginiModeling Cellular Signaling Systems: An Abstraction-Refinement ApproachdhermitÎncă nu există evaluări
- Decoherence in Strongly Coupled Quantum OscillatorsDocument35 paginiDecoherence in Strongly Coupled Quantum Oscillatorsgaminster6935Încă nu există evaluări
- TSMC 1984 6313345Document9 paginiTSMC 1984 6313345RicardoÎncă nu există evaluări
- Analysis and CompensationDocument25 paginiAnalysis and Compensationshaho1946Încă nu există evaluări
- Equivalence Checking For Infinite Systems Using Parameterized Boolean Equation SystemsDocument16 paginiEquivalence Checking For Infinite Systems Using Parameterized Boolean Equation SystemsTaolue ChenÎncă nu există evaluări
- (Mechanical Engineering Series) Hamid Arastoopour, Dimitri Gidaspow, Emad Abbasi (Auth.) - Computational Transport Phenomena of Fluid-Particle Systems-Springer International Publishing (2017)Document114 pagini(Mechanical Engineering Series) Hamid Arastoopour, Dimitri Gidaspow, Emad Abbasi (Auth.) - Computational Transport Phenomena of Fluid-Particle Systems-Springer International Publishing (2017)Alex Samuel SilvaÎncă nu există evaluări
- Gillespie General MethodDocument32 paginiGillespie General MethodGeorge Michael Alvarado LopezÎncă nu există evaluări
- Perona2000 Article OnTheTrajectoryMethodForTheRecDocument21 paginiPerona2000 Article OnTheTrajectoryMethodForTheRecSai SyamÎncă nu există evaluări
- Computational Materials Science: Rodrigo Freitas, Mark Asta, Maurice de KoningDocument9 paginiComputational Materials Science: Rodrigo Freitas, Mark Asta, Maurice de KoningShivasish MishraÎncă nu există evaluări
- Overview of Mechanistic Modelling TechniquesDocument6 paginiOverview of Mechanistic Modelling TechniquesGXGGXGÎncă nu există evaluări
- Estimation of Space-Time Varying Parameters Using A Diffusion LMS AlgorithmDocument16 paginiEstimation of Space-Time Varying Parameters Using A Diffusion LMS AlgorithmAnthony NewmanÎncă nu există evaluări
- Rate Based Distillation Williums PaperDocument4 paginiRate Based Distillation Williums Paperzorro21072107Încă nu există evaluări
- Evolution of Metabolic Networks - A Computational FrameworkDocument14 paginiEvolution of Metabolic Networks - A Computational FrameworkRosana GiacominiÎncă nu există evaluări
- Unesco - Eolss Sample Chapters: Modeling and Simulation of Distributed Parameter SystemsDocument11 paginiUnesco - Eolss Sample Chapters: Modeling and Simulation of Distributed Parameter SystemsPeter Nai HoÎncă nu există evaluări
- Expert Systems With Applications: Ying Wang, Jianzhong Zhou, Chao Zhou, Yongqiang Wang, Hui Qin, Youlin LuDocument8 paginiExpert Systems With Applications: Ying Wang, Jianzhong Zhou, Chao Zhou, Yongqiang Wang, Hui Qin, Youlin Luprabhabathi deviÎncă nu există evaluări
- Adaptive Rational Spectral Methods For The Linear Stability Analysis of Nonlinear Fourth-Order ProblemsDocument17 paginiAdaptive Rational Spectral Methods For The Linear Stability Analysis of Nonlinear Fourth-Order ProblemsSgk ManikandanÎncă nu există evaluări
- A Mathematical ModelDocument6 paginiA Mathematical ModelKang Yong BinÎncă nu există evaluări
- Introduction To The Thermodynamically Constrained Averaging Theory For Porous Medium SystemsDocument609 paginiIntroduction To The Thermodynamically Constrained Averaging Theory For Porous Medium SystemsAna Carla SantanaÎncă nu există evaluări
- The Cooperative Royal Road: Avoiding HitchhikingDocument12 paginiThe Cooperative Royal Road: Avoiding HitchhikingMarius_2010Încă nu există evaluări
- Simultaneous Topology and Stiffness Identification for Mass-Spring ModelsDocument9 paginiSimultaneous Topology and Stiffness Identification for Mass-Spring Modelsshahuo888Încă nu există evaluări
- Stochastic Analysis of Heap Leaching ProcessDocument6 paginiStochastic Analysis of Heap Leaching ProcessInfernuzÎncă nu există evaluări
- Transaction HTS2012Document11 paginiTransaction HTS2012Sujoy DasÎncă nu există evaluări
- Different Types of Instabilities and Complex Dynamics in Reaction-Diffusion Systems With Fractional DerivativesDocument10 paginiDifferent Types of Instabilities and Complex Dynamics in Reaction-Diffusion Systems With Fractional DerivativesvagafÎncă nu există evaluări
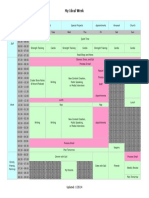
- My Ideal Week PDFDocument1 paginăMy Ideal Week PDFAnonymous QE45TVC9e3Încă nu există evaluări
- Chassis (LS17) PDFDocument10 paginiChassis (LS17) PDFlasky11Încă nu există evaluări
- Reaction Paper The Flight From ConversationDocument4 paginiReaction Paper The Flight From ConversationJoe NasalitaÎncă nu există evaluări
- Brake System: PrecautionDocument75 paginiBrake System: PrecautionRoger SwensonÎncă nu există evaluări
- Aircraft Maintanence Engg Book 9A TypeDocument139 paginiAircraft Maintanence Engg Book 9A TypeimmortalforeverÎncă nu există evaluări
- Master Plumber Exam Coverage (Philippines)Document4 paginiMaster Plumber Exam Coverage (Philippines)Eugene Micarandayo100% (3)
- Abrasive Cleaning SystemDocument4 paginiAbrasive Cleaning SystemSulfikar SalimÎncă nu există evaluări
- Tube Upsetting Machines BrochureDocument10 paginiTube Upsetting Machines BrochuredemirilkÎncă nu există evaluări
- Sop Flower Arrangement in HotelDocument2 paginiSop Flower Arrangement in HotelwawahalimÎncă nu există evaluări
- Speed Control of Brushless DC Motor Using Fuzzy Logic ControllerDocument9 paginiSpeed Control of Brushless DC Motor Using Fuzzy Logic ControllerIOSRjournalÎncă nu există evaluări
- Diligence International Group Understands MexicoDocument2 paginiDiligence International Group Understands MexicoPR.comÎncă nu există evaluări
- Envea Dusty Manual enDocument26 paginiEnvea Dusty Manual enmikiÎncă nu există evaluări
- Nokia 7368 ISAM ONT G-010G-A For Optical LAN Data Sheet enDocument3 paginiNokia 7368 ISAM ONT G-010G-A For Optical LAN Data Sheet enMirado AndriamihasinoroÎncă nu există evaluări
- Aztech+700WR-3G User ManualDocument57 paginiAztech+700WR-3G User Manualkero_the_hero67% (3)
- Multipoint Socket Profile VW 010 43: KonzernnormDocument4 paginiMultipoint Socket Profile VW 010 43: KonzernnormRicardo Vitoriano100% (1)
- 24C02BN Su18Document26 pagini24C02BN Su18Dwp BhaskaranÎncă nu există evaluări
- 218477these Stufy of An in Vehicule Infotainement SystemDocument79 pagini218477these Stufy of An in Vehicule Infotainement SystemKhaled GharbiÎncă nu există evaluări
- How To Build A 43 Note CalliopeDocument14 paginiHow To Build A 43 Note CalliopeBrad SommersÎncă nu există evaluări
- Specialized Epic EVO 2021Document3 paginiSpecialized Epic EVO 2021MTB-VCOÎncă nu există evaluări
- Cisco CCNA SecurityDocument85 paginiCisco CCNA SecurityPaoPound HomnualÎncă nu există evaluări
- Science Manuscript Word TemplateDocument4 paginiScience Manuscript Word TemplatepopularsodaÎncă nu există evaluări
- FinePrint pdfFactory Pro Trial Version PDF CreationDocument40 paginiFinePrint pdfFactory Pro Trial Version PDF CreationTUAN NGUYEN VANÎncă nu există evaluări
- Blasting and Painting of Sheds, Pipes, Pipe Fittings, Vessels and Tanks DailyDocument3 paginiBlasting and Painting of Sheds, Pipes, Pipe Fittings, Vessels and Tanks DailyEjike Francis ChizobaÎncă nu există evaluări
- Tesla CSRDocument15 paginiTesla CSRM.Bhaskar0% (1)
- Managing Information for Better DecisionsDocument12 paginiManaging Information for Better DecisionsTosin WilliamsÎncă nu există evaluări
- Casing & Compressor of Air ConditionerDocument22 paginiCasing & Compressor of Air ConditionerAbdullah Zakirin Abdul 'AzamÎncă nu există evaluări
- Dwg. No. 63170016 - ER-15Document1 paginăDwg. No. 63170016 - ER-15GiantcanaÎncă nu există evaluări
- Tomtom Device ForensicsDocument5 paginiTomtom Device ForensicsSwaroop WaghadeÎncă nu există evaluări
- C Programming: Charudatt KadolkarDocument34 paginiC Programming: Charudatt KadolkarDhiliban SwaminathanÎncă nu există evaluări
- Is 15560 - 2005Document12 paginiIs 15560 - 2005kalpanaadhiÎncă nu există evaluări