S-ar putea să vă placă și
- CECRDocument190 paginiCECRapi-3844239100% (6)
- BTS CPI 2 CH 4 Oscillations Forcées Et RésonanceDocument5 paginiBTS CPI 2 CH 4 Oscillations Forcées Et RésonanceLucas Filipuzzi100% (1)
- Decrement Logarithmique PDFDocument2 paginiDecrement Logarithmique PDFDavid Konan100% (2)
- Ploycopié TP OV 2020-2021Document39 paginiPloycopié TP OV 2020-2021riadÎncă nu există evaluări
- CoursDocument16 paginiCoursNidhal BenachiÎncă nu există evaluări
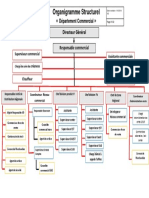
- Organigramme GleDocument1 paginăOrganigramme GleNidhal BenachiÎncă nu există evaluări
- Consomation 2018Document28 paginiConsomation 2018Nidhal BenachiÎncă nu există evaluări
- Bell Cone Brochure - French PDFDocument8 paginiBell Cone Brochure - French PDFNidhal BenachiÎncă nu există evaluări
- Sous Niveau AbbatueDocument1 paginăSous Niveau AbbatueNidhal BenachiÎncă nu există evaluări
- Broy AgeDocument9 paginiBroy AgeYoussef GlissiÎncă nu există evaluări
- Broyeur A MarteauxDocument5 paginiBroyeur A MarteauxNidhal BenachiÎncă nu există evaluări
- U1ADocument4 paginiU1ANidhal BenachiÎncă nu există evaluări
- 1ere Annee Techn, Ologie Et Sciences de La Matiere Sem 1 Cle8b588dDocument10 pagini1ere Annee Techn, Ologie Et Sciences de La Matiere Sem 1 Cle8b588dNidhal BenachiÎncă nu există evaluări
- DM05 - Oscillateur Amorti (Énoncé) À DEPOSER Au Plus Tard MERCREDI 3 NOVEMBRE À 10hDocument3 paginiDM05 - Oscillateur Amorti (Énoncé) À DEPOSER Au Plus Tard MERCREDI 3 NOVEMBRE À 10hMohamed OuAz0% (1)
- Regimes Libres de L Oscillateur Harmonique ExercicesDocument3 paginiRegimes Libres de L Oscillateur Harmonique ExercicesIthiel MelchisedecÎncă nu există evaluări
- Ploycopié TP OV 2020-2021Document39 paginiPloycopié TP OV 2020-2021nemer kheireddineÎncă nu există evaluări
- Tp03complet PDFDocument12 paginiTp03complet PDFYassir RochdÎncă nu există evaluări
- Exelec2 20089 PDFDocument12 paginiExelec2 20089 PDFOhani Kouchwah100% (1)
- TP 03 VOM M'hamedDocument8 paginiTP 03 VOM M'hamedabdousouafi59Încă nu există evaluări
- 32-004 Éléctrocinétique RLC PDFDocument10 pagini32-004 Éléctrocinétique RLC PDFالغزيزال الحسن EL GHZIZAL HassaneÎncă nu există evaluări
- 14 BouchonDocument4 pagini14 BouchonIbra CisseÎncă nu există evaluări
- Chap07 RSF 2023Document16 paginiChap07 RSF 2023dawoud.kenzariÎncă nu există evaluări
- Vibration PDFDocument39 paginiVibration PDFahmed ahmedÎncă nu există evaluări
- Bnyy0-CHAPITRE II AkloucheDocument6 paginiBnyy0-CHAPITRE II Aklouchehakim1348100% (1)
- Devoir Libre 1 - Physique AppliquéeDocument2 paginiDevoir Libre 1 - Physique AppliquéeMayouMohAmed100% (1)
- Problème CorrigéDocument5 paginiProblème CorrigéChatgpt enstÎncă nu există evaluări
- Chap. 11 Circuit RLC en Régime Sinusoïdal ForcéDocument11 paginiChap. 11 Circuit RLC en Régime Sinusoïdal ForcéDieu Est Fidèle100% (1)
- Chapitre 3Document12 paginiChapitre 3Wissem BejaouiÎncă nu există evaluări
- C72 Oscillateurs En-Regime SinusoidalDocument28 paginiC72 Oscillateurs En-Regime SinusoidalCédric SorghoÎncă nu există evaluări
- Cremef12doc Lycee3Document344 paginiCremef12doc Lycee3faizmorchid1993avrilÎncă nu există evaluări
- EC3 RLC Serie PDFDocument10 paginiEC3 RLC Serie PDFOussama ZnÎncă nu există evaluări
- TD: Les Modes de Simulation Sur Pspice: Exercice 1Document5 paginiTD: Les Modes de Simulation Sur Pspice: Exercice 1Moez KtataÎncă nu există evaluări
- Systèmes Oscillants - DecrementDocument34 paginiSystèmes Oscillants - Decrementkhaoula2013Încă nu există evaluări
- TP VooDocument16 paginiTP VooAbdou KefaifiÎncă nu există evaluări
- Ondes Et Signaux - Chapitre 4-Circuits Lineaires Du Second OrdreDocument46 paginiOndes Et Signaux - Chapitre 4-Circuits Lineaires Du Second Ordrealphamamadoud330Încă nu există evaluări
- Exo Oscillateur - Amorti CompletDocument5 paginiExo Oscillateur - Amorti CompletAmza ZinsonniÎncă nu există evaluări
- Circuit RLC en Régime Sinusoïdal ForceDocument11 paginiCircuit RLC en Régime Sinusoïdal ForceSAWADOGO HAMEDÎncă nu există evaluări
- TD2 Electrocinetique1 Regime Transitoire 1ordreDocument3 paginiTD2 Electrocinetique1 Regime Transitoire 1ordrezied houanebÎncă nu există evaluări