S-ar putea să vă placă și
- J. Ambjorn Et Al - Effective Sampling of Random Surfaces by Baby Universe SurgeryDocument10 paginiJ. Ambjorn Et Al - Effective Sampling of Random Surfaces by Baby Universe SurgeryGijke3Încă nu există evaluări
- Infinite Elements For 3 Dimensional Wave - Structure Interaction Problems 1992Document12 paginiInfinite Elements For 3 Dimensional Wave - Structure Interaction Problems 1992ciscoÎncă nu există evaluări
- A Theory of RHEEDDocument16 paginiA Theory of RHEEDminhibtÎncă nu există evaluări
- Large Eddy Simulations of A Stirred Tank Using The Lattice Boltzmann Method On A Nonuniform GridDocument30 paginiLarge Eddy Simulations of A Stirred Tank Using The Lattice Boltzmann Method On A Nonuniform GridAlankar Agarwal (P14BS001)Încă nu există evaluări
- Detailed discussion of a linear electric field frequency shift induced in confined gases by a magnetic field gradientDocument33 paginiDetailed discussion of a linear electric field frequency shift induced in confined gases by a magnetic field gradientrgolub1Încă nu există evaluări
- Galerkin EFGM Method Computational MechanicsDocument9 paginiGalerkin EFGM Method Computational MechanicsMohit PantÎncă nu există evaluări
- Ale Methods For Determining Stationary Solutions of Metal Forming ProcessesDocument10 paginiAle Methods For Determining Stationary Solutions of Metal Forming ProcessesosternpriyambodoÎncă nu există evaluări
- IBM for Flow Around Thin BodiesDocument5 paginiIBM for Flow Around Thin BodiesKian ChuanÎncă nu există evaluări
- 0263 8231 (84) 90004 1 PDFDocument22 pagini0263 8231 (84) 90004 1 PDFjuan carlos molano toroÎncă nu există evaluări
- Higher Order Perturbation Theory Applied To Radiative Transfer in Non-Plane-Parallel MediaDocument14 paginiHigher Order Perturbation Theory Applied To Radiative Transfer in Non-Plane-Parallel MediacdcrossroaderÎncă nu există evaluări
- Indefinite Symmetric SystemDocument18 paginiIndefinite Symmetric SystemsalmansalsabilaÎncă nu există evaluări
- Solution of Transient Transport Equation Using An Upstream Finite Element SchemeDocument11 paginiSolution of Transient Transport Equation Using An Upstream Finite Element SchemechrissbansÎncă nu există evaluări
- Equation of State Calculations by Fast Computing Machines: Additional Information On J. Chem. PhysDocument7 paginiEquation of State Calculations by Fast Computing Machines: Additional Information On J. Chem. PhysIndra Prakash JhaÎncă nu există evaluări
- B.T. Sutcliffe and J. Tennyson - The Construction and Fitting of Molecular Potential Energy Surfaces and Their Use in Vibration-Rotation CalculationsDocument14 paginiB.T. Sutcliffe and J. Tennyson - The Construction and Fitting of Molecular Potential Energy Surfaces and Their Use in Vibration-Rotation CalculationsMaxnamewÎncă nu există evaluări
- Compressible Navier-Stokes Flow Solver with Scalar TransportDocument23 paginiCompressible Navier-Stokes Flow Solver with Scalar TransportHDYangÎncă nu există evaluări
- Two-Phase Electrohydrodynamic Simulations Using A Volume-Of - Uid ApproachDocument19 paginiTwo-Phase Electrohydrodynamic Simulations Using A Volume-Of - Uid ApproachSadegh AhmadiÎncă nu există evaluări
- The Virtual Crack Extension Method For Nonlinear Material BehaviorDocument12 paginiThe Virtual Crack Extension Method For Nonlinear Material BehaviorYukun LiÎncă nu există evaluări
- Cole HydrogenDocument15 paginiCole HydrogenDyra KesumaÎncă nu există evaluări
- Mat - 4Document23 paginiMat - 4Luis FuentesÎncă nu există evaluări
- Numerical Solu Tio 00 S NidDocument112 paginiNumerical Solu Tio 00 S Nidmanuelperezz25Încă nu există evaluări
- Koumoutsakos LeonardDocument38 paginiKoumoutsakos LeonardGuilloteau ArthurÎncă nu există evaluări
- On The Calculation of Normals in Free-Surface Flow ProblemsDocument14 paginiOn The Calculation of Normals in Free-Surface Flow Problemsباسل ديوبÎncă nu există evaluări
- Finite-Element Methods in Semiconductor Device SimulationDocument8 paginiFinite-Element Methods in Semiconductor Device SimulationMaxim KomarÎncă nu există evaluări
- N. Kerv : Synthesis Seismic Surface WavesDocument22 paginiN. Kerv : Synthesis Seismic Surface WavesNajeb PendiamanÎncă nu există evaluări
- Finite Element Analysis of Navier-Stokes EquationsDocument28 paginiFinite Element Analysis of Navier-Stokes EquationsSatyen RamaniÎncă nu există evaluări
- Simulation of Leaky Rayleigh Wave at Air-Solid Cylindrical Interfaces by Finite Element MethodDocument4 paginiSimulation of Leaky Rayleigh Wave at Air-Solid Cylindrical Interfaces by Finite Element MethodlatecÎncă nu există evaluări
- Progress in Electromagnetics Research M, Vol. 28, 273-287, 2013Document15 paginiProgress in Electromagnetics Research M, Vol. 28, 273-287, 2013Tommy BJÎncă nu există evaluări
- Jennings, Tuff - An Iterative Method For Large Systems of Linear Structural Equations, 1973Document9 paginiJennings, Tuff - An Iterative Method For Large Systems of Linear Structural Equations, 1973martrantÎncă nu există evaluări
- Electrochemical Impedance Spectroscopy in Solid State IonicsDocument9 paginiElectrochemical Impedance Spectroscopy in Solid State IonicsMohamed A. RagabÎncă nu există evaluări
- Regularized Hankel JAEDocument16 paginiRegularized Hankel JAEVasili TabatadzeÎncă nu există evaluări
- Hemal N. Varambhia, James J. Munro and Jonathan Tennyson - R-Matrix Calculations of Low-Energy Electron Alkane CollisionsDocument7 paginiHemal N. Varambhia, James J. Munro and Jonathan Tennyson - R-Matrix Calculations of Low-Energy Electron Alkane Collisions4534567Încă nu există evaluări
- Ale Method FsiDocument29 paginiAle Method FsiAlexander NarváezÎncă nu există evaluări
- THE Theory of The Zeeman Effect: QuadraticDocument4 paginiTHE Theory of The Zeeman Effect: QuadraticAgung Ari ChandraÎncă nu există evaluări
- Inverse Kinematics Algorithms for Protein Structure DeterminationDocument13 paginiInverse Kinematics Algorithms for Protein Structure Determinationulysse_d_ithaqu7083Încă nu există evaluări
- A Three-Dimensional, Longitudinally-Invariant Finite Element Model For Acoustic Propagation in Shallow Water WaveguidesDocument6 paginiA Three-Dimensional, Longitudinally-Invariant Finite Element Model For Acoustic Propagation in Shallow Water WaveguidesAsih RahmatÎncă nu există evaluări
- " - Si, - P-Z: Convergence Criteria For Iterative ProcessesDocument2 pagini" - Si, - P-Z: Convergence Criteria For Iterative ProcessesKtk ZadÎncă nu există evaluări
- Acoustic Radiation and Scattering From Elastic StructuresDocument16 paginiAcoustic Radiation and Scattering From Elastic StructuresGurusubramaniam SankaranÎncă nu există evaluări
- Tomoda, Faessler, SchmidDocument30 paginiTomoda, Faessler, Schmidzcapg17Încă nu există evaluări
- Studies of An Infinite Element Method For Acoustical RadiationDocument15 paginiStudies of An Infinite Element Method For Acoustical RadiationDr. Sushant ShekharÎncă nu există evaluări
- Electrophoresis of a Colloidal Sphere Parallel to a Dielectric PlaneDocument15 paginiElectrophoresis of a Colloidal Sphere Parallel to a Dielectric PlaneELIZABETHÎncă nu există evaluări
- A Study of Upstream-Weighted High-Order Differencing For Approximation To Flow ConvectionDocument33 paginiA Study of Upstream-Weighted High-Order Differencing For Approximation To Flow ConvectionAna Carolina LoyolaÎncă nu există evaluări
- Progress in Electromagnetics Research, Vol. 123, 243-261, 2012Document19 paginiProgress in Electromagnetics Research, Vol. 123, 243-261, 2012George AcostaÎncă nu există evaluări
- Sandeep Bhatt Et Al - Tree Codes For Vortex Dynamics: Application of A Programming FrameworkDocument11 paginiSandeep Bhatt Et Al - Tree Codes For Vortex Dynamics: Application of A Programming FrameworkVing666789Încă nu există evaluări
- A Simple and Efficient Finite Element For Plate BendingDocument15 paginiA Simple and Efficient Finite Element For Plate Bendingjuan carlos molano toroÎncă nu există evaluări
- Efficient Linear-Response Method Circumventing The Exchange-Correlation Kernel: Theory For Molecular Conductance Under Finite BiasDocument6 paginiEfficient Linear-Response Method Circumventing The Exchange-Correlation Kernel: Theory For Molecular Conductance Under Finite BiasNedsy8Încă nu există evaluări
- Numerical Modeling of Space-Charge-Limited Charged-Particle Emission On A Conformal Triangular MeshDocument19 paginiNumerical Modeling of Space-Charge-Limited Charged-Particle Emission On A Conformal Triangular MeshPatrick L. GoesÎncă nu există evaluări
- Wen Yang and Kai Chang - Intrinsic Spin Hall Effect Induced by Quantum Phase Transition in HgCdTe Quantum WellsDocument5 paginiWen Yang and Kai Chang - Intrinsic Spin Hall Effect Induced by Quantum Phase Transition in HgCdTe Quantum WellsGreamxxÎncă nu există evaluări
- Crystal Field Theory, Tight-Binding Method and Jahn-Teller EffectDocument39 paginiCrystal Field Theory, Tight-Binding Method and Jahn-Teller Effectdragonlj1Încă nu există evaluări
- Added mass formulas for 2D bodies in finite waterDocument13 paginiAdded mass formulas for 2D bodies in finite waterlapuÎncă nu există evaluări
- Geodesic Active Contours: AbstractDocument19 paginiGeodesic Active Contours: AbstractDede Lutfie Hasanah HamimÎncă nu există evaluări
- Far Field Boundary Conditions For Compressible FlowsDocument18 paginiFar Field Boundary Conditions For Compressible FlowsmicÎncă nu există evaluări
- Viscous and Inviscid Matching of Three-DimensionalDocument25 paginiViscous and Inviscid Matching of Three-DimensionalAjju JustusÎncă nu există evaluări
- Partial Variational Principle For Electromagnetic Field Problems: Theory and ApplicationsDocument7 paginiPartial Variational Principle For Electromagnetic Field Problems: Theory and Applicationsharit_ecÎncă nu există evaluări
- Finite Element Beam Vibration: Department of Mechanical, Aerospace and Manufacturing EngineeringDocument4 paginiFinite Element Beam Vibration: Department of Mechanical, Aerospace and Manufacturing EngineeringSyafiq ShaffiaiÎncă nu există evaluări
- Suresh Kumar Dash: Term Paper - Scientific Computing (MA-579H)Document6 paginiSuresh Kumar Dash: Term Paper - Scientific Computing (MA-579H)suresh dashÎncă nu există evaluări
- The Current Finite To Fluid: On State of and Structures CouplingDocument12 paginiThe Current Finite To Fluid: On State of and Structures CouplingonderaliÎncă nu există evaluări
- Finite Element Modeling of Net Panels Using A Net ElementDocument20 paginiFinite Element Modeling of Net Panels Using A Net ElementKtk ZadÎncă nu există evaluări
- Augarde Deeks FINEL 2008Document7 paginiAugarde Deeks FINEL 2008Andrew WigginsÎncă nu există evaluări
- CH041Document4 paginiCH041Toky NirinaÎncă nu există evaluări
- Computational Aspects of Modular Forms and Galois Representations: How One Can Compute in Polynomial Time the Value of Ramanujan's Tau at a Prime (AM-176)De la EverandComputational Aspects of Modular Forms and Galois Representations: How One Can Compute in Polynomial Time the Value of Ramanujan's Tau at a Prime (AM-176)Încă nu există evaluări
- Complex VectorsDocument8 paginiComplex Vectorssuvabrata_das01Încă nu există evaluări
- Proceedings - 27th Conference (Copenhagen 2014) - 1-6 Seakeeping CommitteeDocument80 paginiProceedings - 27th Conference (Copenhagen 2014) - 1-6 Seakeeping CommitteeSutiyo Ahad100% (2)
- Li PgfuuhdDocument168 paginiLi PgfuuhdAcheronInfinitusÎncă nu există evaluări
- Inst of Mathematical Sciences Conditions For Wave-Like Equations. (U) Dec 79 A Bayliss-E TurkelDocument21 paginiInst of Mathematical Sciences Conditions For Wave-Like Equations. (U) Dec 79 A Bayliss-E Turkelsuvabrata_das01Încă nu există evaluări
- NCERT Book Mathematics Part I Class XIIDocument288 paginiNCERT Book Mathematics Part I Class XIInikhilam.com100% (2)
- LLoyd's Register Marine - Global Marine Safety TrendsDocument23 paginiLLoyd's Register Marine - Global Marine Safety Trendssuvabrata_das01100% (1)
- Multidegrees of FreedomDocument24 paginiMultidegrees of FreedomLogesh BabuÎncă nu există evaluări
- The Catenary PDFDocument5 paginiThe Catenary PDFChandra PrakashÎncă nu există evaluări
- Ansys Aqwa: Floating Offshore Structure SolutionsDocument4 paginiAnsys Aqwa: Floating Offshore Structure Solutionssuvabrata_das01Încă nu există evaluări
- N.choplain PHD ThesisDocument266 paginiN.choplain PHD Thesissuvabrata_das01Încă nu există evaluări
- Catalogue RamnäsDocument13 paginiCatalogue RamnäsSreekanthÎncă nu există evaluări
- Proceedings - 27th Conference (Copenhagen 2014) - 1-6 Seakeeping CommitteeDocument80 paginiProceedings - 27th Conference (Copenhagen 2014) - 1-6 Seakeeping CommitteeSutiyo Ahad100% (2)
- FEA Stiffness MethodDocument17 paginiFEA Stiffness Methodsuvabrata_das01Încă nu există evaluări
- Lateral Frequency of Shaft Rotor SystemsDocument14 paginiLateral Frequency of Shaft Rotor SystemscarlfelipeÎncă nu există evaluări
- 33 CFR 125-199Document1.046 pagini33 CFR 125-199suvabrata_das01Încă nu există evaluări
- Basic Wave MotionDocument42 paginiBasic Wave MotionDex JHÎncă nu există evaluări
- 2010 OTC 21012 Anchor Leg System Integrity - From Design Through Service Life 2010 SNAME NTR037Document13 pagini2010 OTC 21012 Anchor Leg System Integrity - From Design Through Service Life 2010 SNAME NTR037suvabrata_das01Încă nu există evaluări
- IFEM Ch17Document18 paginiIFEM Ch17Ratna KommojiÎncă nu există evaluări
- Marine Engineering System IntroductionDocument114 paginiMarine Engineering System Introductionsuvabrata_das01100% (12)
- Iso Parametric FormulationDocument14 paginiIso Parametric FormulationSathya PatcheappinÎncă nu există evaluări
- Basic Principle of Ship PropulsionDocument45 paginiBasic Principle of Ship PropulsionShengte Hsu100% (7)
- Mohan P Shell DissertationDocument164 paginiMohan P Shell Dissertationsuvabrata_das01Încă nu există evaluări
- Demo DLLDocument2 paginiDemo DLLArlene Diokno100% (1)
- Perioperative HypothermiaDocument4 paginiPerioperative Hypothermiasri utari masyitahÎncă nu există evaluări
- Overview of Pathophysiology of Hypoxemia and HypoxiaDocument15 paginiOverview of Pathophysiology of Hypoxemia and HypoxiaMARY ANN CAGATANÎncă nu există evaluări
- Chapter 1 - Introduction To Machinery PrinciplesDocument27 paginiChapter 1 - Introduction To Machinery PrinciplesYousab CreatorÎncă nu există evaluări
- Eplob Eplob/A Epmob Epmob/A: PhotocellsDocument2 paginiEplob Eplob/A Epmob Epmob/A: PhotocellsSupuran RichardoÎncă nu există evaluări
- 2nd - Science-Second-Quarter-Week-1Document37 pagini2nd - Science-Second-Quarter-Week-1Arlene AranzasoÎncă nu există evaluări
- Site Master FileDocument51 paginiSite Master FileMilonhg100% (2)
- Stepan Pol BC 180Document2 paginiStepan Pol BC 180Parag RautÎncă nu există evaluări
- Kelas 1 AlphabetTITLE Kelas 1 Numbers ConversationTITLE Kelas 2 Feelings Body PartsDocument54 paginiKelas 1 AlphabetTITLE Kelas 1 Numbers ConversationTITLE Kelas 2 Feelings Body PartsArti Hikmatullah Perbawana Sakti BuanaÎncă nu există evaluări
- Steel StaircaseDocument17 paginiSteel StaircaseKarthick CrazeiÎncă nu există evaluări
- Hart Fuller Debate: Hart Fuller Debate Is One of The Most Interesting Academic Debates of All Times That Took Place inDocument1 paginăHart Fuller Debate: Hart Fuller Debate Is One of The Most Interesting Academic Debates of All Times That Took Place inAmishaÎncă nu există evaluări
- Chapter 5 Coordinate GeometryDocument33 paginiChapter 5 Coordinate GeometryKalÎncă nu există evaluări
- NTE56004 Thru NTE56010 TRIAC, 15 Amp: FeaturesDocument2 paginiNTE56004 Thru NTE56010 TRIAC, 15 Amp: FeaturesFreddy SarabiaÎncă nu există evaluări
- Sanoj Kumar - OriginalDocument5 paginiSanoj Kumar - OriginalHamid SaifÎncă nu există evaluări
- General Psychology - Unit 2Document23 paginiGeneral Psychology - Unit 2shivapriya ananthanarayananÎncă nu există evaluări
- Comparison Study of Conventional Hot-Water and Microwave Blanching at Different Timetemperaturepower Combinations On The Quality of Potatoes.Document72 paginiComparison Study of Conventional Hot-Water and Microwave Blanching at Different Timetemperaturepower Combinations On The Quality of Potatoes.DavldSmith100% (1)
- Li-ION Battery Charger FeaturesDocument2 paginiLi-ION Battery Charger Featureshariyadi aryoÎncă nu există evaluări
- AAA Variable Spring Hangers CatalogDocument31 paginiAAA Variable Spring Hangers CatalogNopparut0% (1)
- 3 Edition February 2013: Ec2 Guide For Reinforced Concrete Design For Test and Final ExaminationDocument41 pagini3 Edition February 2013: Ec2 Guide For Reinforced Concrete Design For Test and Final ExaminationDark StingyÎncă nu există evaluări
- Variants of NormalDocument9 paginiVariants of NormalFaizah HannyÎncă nu există evaluări
- DUB01CB Eng PDFDocument4 paginiDUB01CB Eng PDFAnonymous hj273CMÎncă nu există evaluări
- Particle Technology Che Calculations Separation Processes Heat and Mass TransferDocument1 paginăParticle Technology Che Calculations Separation Processes Heat and Mass TransferAduchelab AdamsonuniversityÎncă nu există evaluări
- Gas Turbine Performance Enhancement Update: GE Energy ServicesDocument45 paginiGas Turbine Performance Enhancement Update: GE Energy Servicesesteban100% (1)
- Artikel Ilmiah FikriDocument6 paginiArtikel Ilmiah FikriViola Mei DamayantiÎncă nu există evaluări
- Finite Element Simplified Fatigue AnalysisDocument4 paginiFinite Element Simplified Fatigue AnalysisJin Hwan KimÎncă nu există evaluări
- 03.can-Bus and Sae-Bus j1939 - CatDocument29 pagini03.can-Bus and Sae-Bus j1939 - CatEdison Pfoccori BarrionuevoÎncă nu există evaluări
- GreyFox Intercom Install GuideDocument12 paginiGreyFox Intercom Install GuideAbdallah HashemÎncă nu există evaluări
- Fe in Black TeaDocument6 paginiFe in Black TeaHerni Nur AeniÎncă nu există evaluări
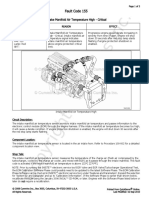
- Fault Code 155: Intake Manifold Air Temperature High - CriticalDocument3 paginiFault Code 155: Intake Manifold Air Temperature High - Criticalhamilton miranda100% (1)
- Paguro 06000 Spare Parts Catalogue PDFDocument88 paginiPaguro 06000 Spare Parts Catalogue PDFBoris Sitorus100% (2)